KE0079 Keyes ULN2003 步进电机驱动板教程#
1. 模块介绍#
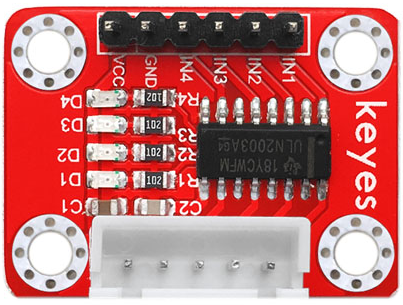
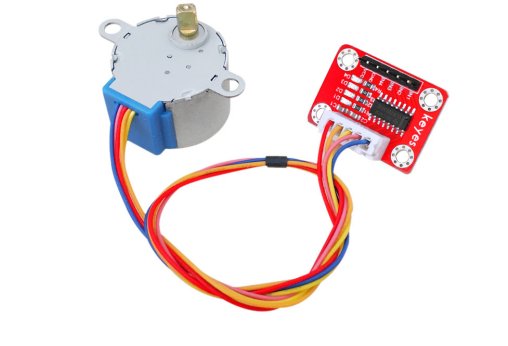
KE0079 Keyes ULN2003 步进电机驱动板是一款基于 ULN2003 芯片的步进电机驱动模块,专为 4 相 5 线步进电机(如 28BYJ-48 步进电机)设计。模块通过简单的控制信号即可驱动步进电机,适用于机器人、机械臂、自动化设备等场景。
模块采用环保红色 PCB 板,内置 ULN2003 晶体管阵列,能够提供高达 500mA 的驱动电流,支持 5V 或 12V 的步进电机。
应用场景#
机器人控制
机械臂驱动
自动化设备
精密定位系统
DIY 项目
2. 模块特点#
高兼容性:支持 4 相 5 线步进电机(如 28BYJ-48)。
高驱动能力:内置 ULN2003 晶体管阵列,单通道最大驱动电流 500mA。
易于使用:通过简单的控制信号即可驱动步进电机。
环保设计:采用红色环保 PCB 板,耐用且稳定。
LED 指示灯:每个通道配有 LED 指示灯,方便调试。
3. 规格参数#
参数 |
值 |
|---|---|
工作电压 |
5V ~ 12V(DC) |
驱动电流 |
最大 500mA(单通道) |
支持电机类型 |
4 相 5 线步进电机 |
接口类型 |
4 路控制信号输入 |
尺寸 |
42mm × 31mm × 3mm |
重量 |
5g |
4. 工作原理#
ULN2003 是一款高电压、大电流达林顿晶体管阵列,内部包含 7 个达林顿晶体管,每个通道可以驱动高达 500mA 的电流。驱动板通过控制 ULN2003 的输入信号,依次激活步进电机的 4 个线圈,从而实现步进电机的旋转。
步进电机的工作方式#
步进电机通过依次激活线圈产生旋转运动。
每次激活一个线圈,电机会旋转一个步距角。
通过改变线圈的激活顺序,可以控制电机的旋转方向(顺时针或逆时针)。
5. 接口说明#
模块有 10 个主要引脚,具体说明如下:
引脚名称 |
功能说明 |
|---|---|
IN1 |
控制信号输入 1,接 Arduino 的数字引脚。 |
IN2 |
控制信号输入 2,接 Arduino 的数字引脚。 |
IN3 |
控制信号输入 3,接 Arduino 的数字引脚。 |
IN4 |
控制信号输入 4,接 Arduino 的数字引脚。 |
VCC |
电源正极(5V ~ 12V)。用于为步进电机供电。 |
GND |
电源负极(接地)。与 Arduino 或其他控制板的 GND 引脚连接。 |
电机接口 |
4 相 5 线步进电机接口,用于连接步进电机(如 28BYJ-48)。 |
6. 连接图#
以下是 KE0079 模块与 Arduino UNO 的连接示意图:
模块引脚 |
Arduino 引脚 |
|---|---|
IN1 |
D8 |
IN2 |
D9 |
IN3 |
D10 |
IN4 |
D11 |
VCC |
5V |
GND |
GND |
连接图如下:
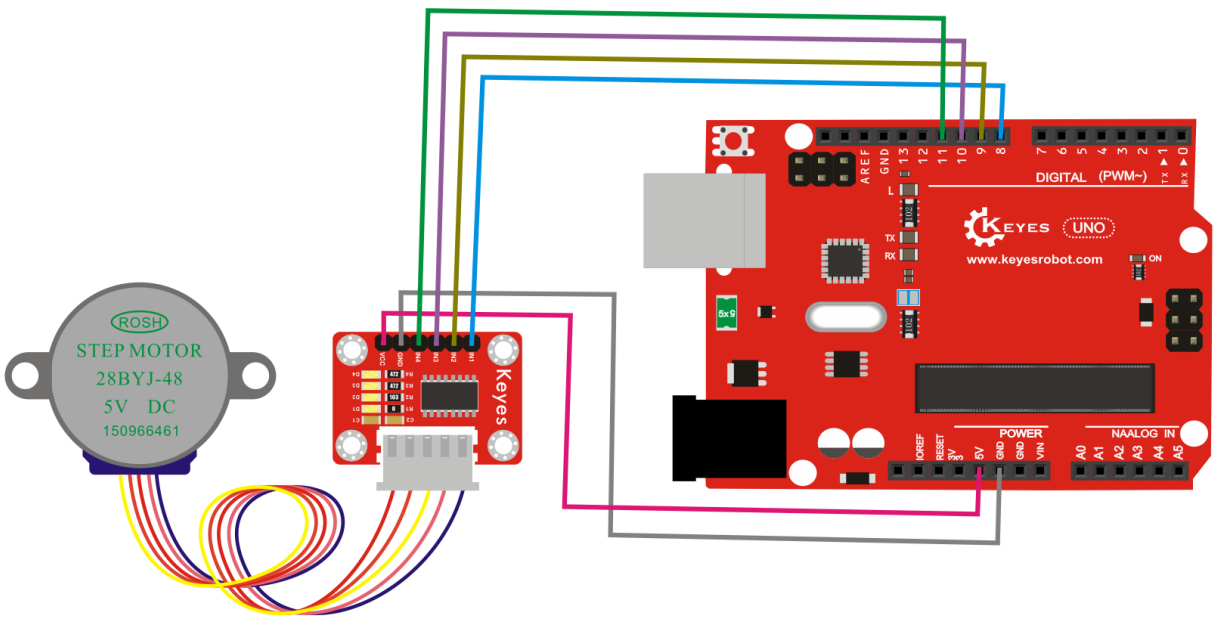
步进电机通过模块的电机接口连接到驱动板。
7. 示例代码#
以下是用于测试 KE0079 模块的 Arduino 示例代码,通过控制步进电机实现顺时针和逆时针旋转。
代码示例#
// 定义步进电机的控制引脚
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
// 定义步进电机的步序表
int steps[8][4] = {
{1, 0, 0, 0},
{1, 1, 0, 0},
{0, 1, 0, 0},
{0, 1, 1, 0},
{0, 0, 1, 0},
{0, 0, 1, 1},
{0, 0, 0, 1},
{1, 0, 0, 1}
};
void setup() {
// 设置控制引脚为输出模式
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
// 顺时针旋转
for (int i = 0; i < 512; i++) { // 512 步为一圈
stepMotor(i % 8);
delay(2); // 调整延迟时间以改变转速
}
delay(1000); // 停止 1 秒
// 逆时针旋转
for (int i = 511; i >= 0; i--) {
stepMotor(i % 8);
delay(2);
}
delay(1000); // 停止 1 秒
}
// 控制步进电机的步进函数
void stepMotor(int step) {
digitalWrite(IN1, steps[step][0]);
digitalWrite(IN2, steps[step][1]);
digitalWrite(IN3, steps[step][2]);
digitalWrite(IN4, steps[step][3]);
}
8. 实验现象#
硬件连接:按照连接图连接模块与 Arduino UNO。
烧录代码:将代码上传到 Arduino UNO。
运行测试:
步进电机会顺时针旋转一圈,停止 1 秒后逆时针旋转一圈。
可以通过调整代码中的
delay()时间改变电机的转速。模块上的 LED 指示灯会依次点亮,指示当前激活的线圈。
9. 注意事项#
供电电压:模块支持 5V ~ 12V 电压,确保步进电机的供电电压与模块匹配。
电机类型:模块适用于 4 相 5 线步进电机(如 28BYJ-48),其他类型的电机可能无法正常工作。
电流限制:ULN2003 的单通道最大驱动电流为 500mA,避免超出此范围。
散热问题:长时间连续使用时,注意模块的散热情况,避免过热。
调试指示灯:模块上的 LED 指示灯可以帮助调试电机的工作状态。
10. 参考链接#
如果需要进一步调整代码或有其他问题,请告诉我!