项目33 密码锁#
1. 项目介绍:
常用的数字按钮传感器,一个按钮就使用一个IO口,而有时我们需要的按钮比较多时,就会占用过多的IO口,为了节省IO口的使用,把多个按钮做成了矩阵类型,通过行列线的控制,实现少IO口控制多个按钮。
在本项目中,我们将来学习ESP32和薄膜4*4矩阵键盘控制舵机和蜂鸣器。
2. 项目元件:
|
|
|
|---|---|---|
ESP32*1 |
面包板*1 |
舵机*1 |
|
|
|
薄膜4×4矩阵键盘*1 |
USB 线*1 |
跳线若干 |
|
|
|
NPN型晶体管(S8050)*1 |
有源蜂鸣器*1 |
1KΩ电阻*1 |







3. 元件知识:
4×4矩阵键盘: 键盘是一种集成了许多键的设备。如下图所示,一个4x4键盘集成16个键。

与LED矩阵集成一样,在4x4键盘中,每排键都是用一根引脚连接,每一列键都是一样的。这样的连接可以减少处理器端口的占用。内部电路如下所示。
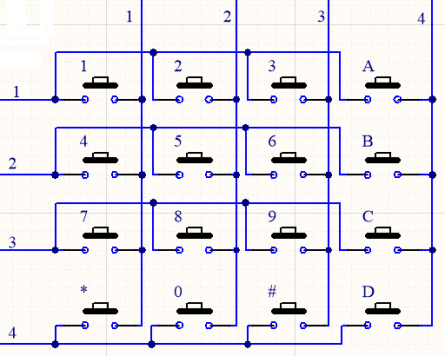
使用方法类似于矩阵LED,即使用行扫描或列扫描方法检测每列或每行上的键的状态。以列扫描法为例,向第4列(Pin4)发送低电平,检测第1、2、3、4行电平状态,判断A、B、C、D键是否按下。然后依次将低电平发送到列3、2、1,检测是否有其它键被按下。然后,你可以获得所有键的状态。
4. 读取4*4矩阵键盘的键值:
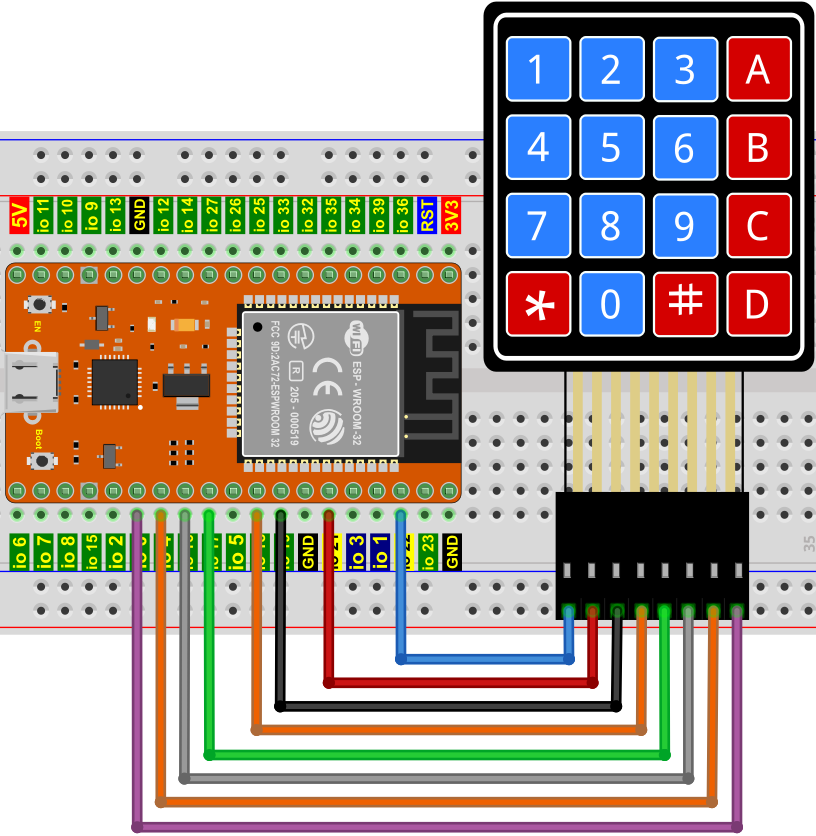
我们首先使用一个简单的代码读取4*4矩阵键盘的键值并将其打印出来,其接线图如下所示:
本教程中使用的代码保存在:“…\程序代码\Python_代码”的路径中
。
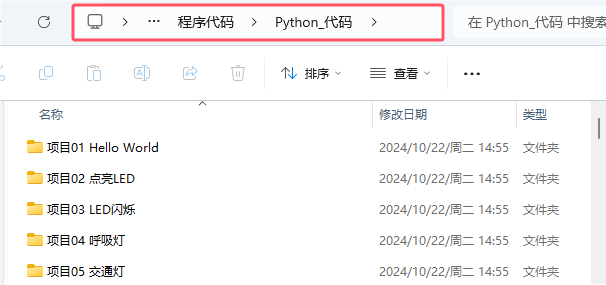
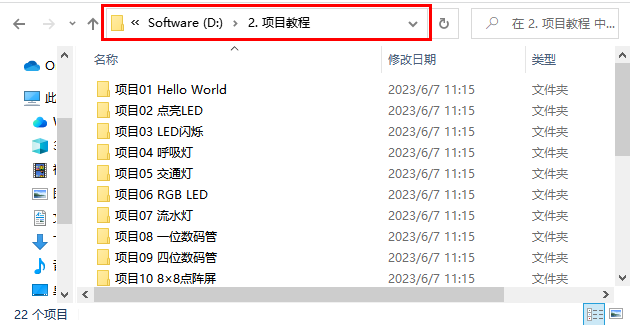
你可以把代码移到任何地方。例如,我们将代码保存在 D盘 中,路径为D:\2. 项目教程。
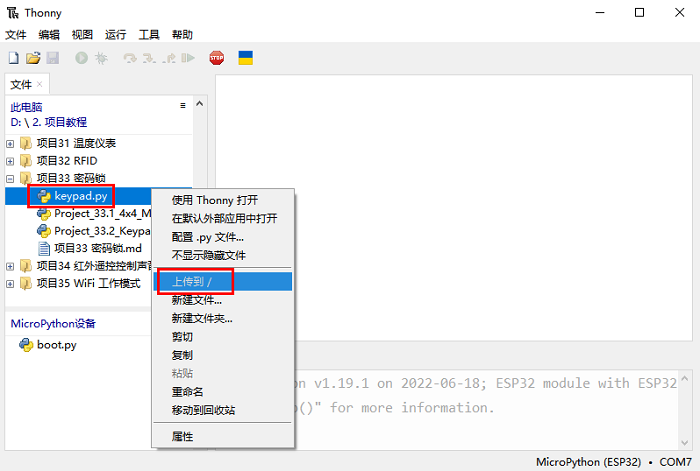
打开 “Thonny” 软件,点击 “此电脑” → “D:” → “2. 项目教程” → “项目33 密码锁”。选择 “keypad.py”,右键单击鼠标选择 “上传到/”,等待 “keypad.py” 被上传到ESP32. 并鼠标左键双击“Project_33.1_4x4_Matrix_Keypad_Display.py”。
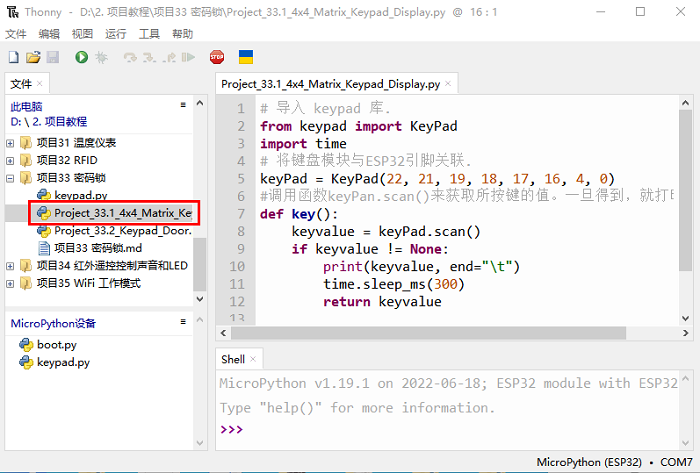
# 导入 keypad 库.
from keypad import KeyPad
import time
# 将键盘模块与ESP32引脚关联.
keyPad = KeyPad(22, 21, 19, 18, 17, 16, 4, 0)
#调用函数keyPan.scan()来获取所按键的值。一旦得到,就打印出来.
def key():
keyvalue = keyPad.scan()
if keyvalue != None:
print(keyvalue, end="\t")
time.sleep_ms(300)
return keyvalue
while True:
key()
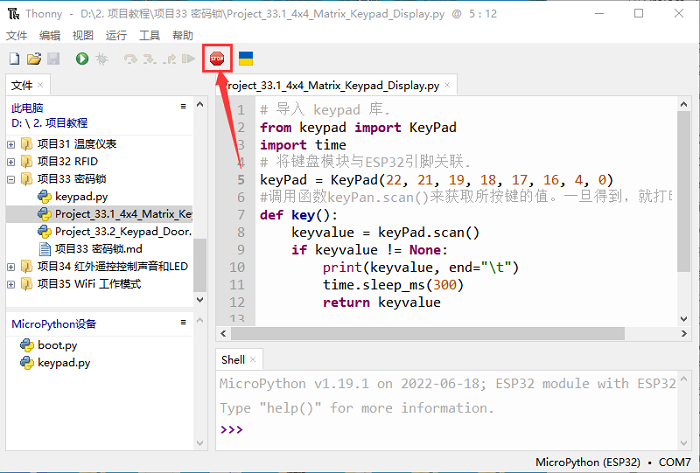
确保ESP32已经连接到电脑上,单击  。
。
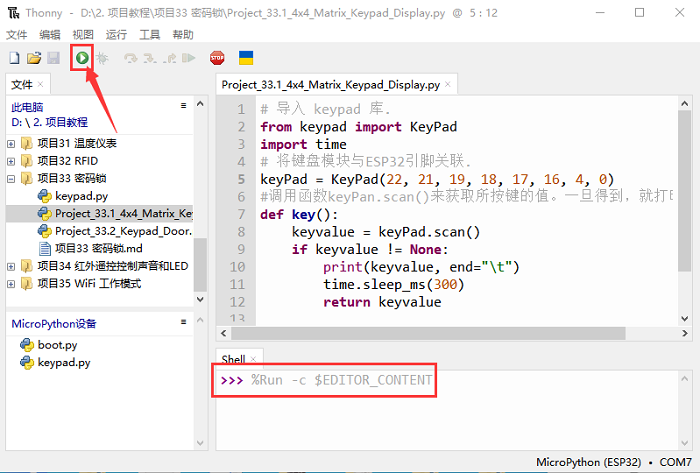
单击  ,代码开始执行,你会看到的现象是:按下键盘,Thonny IDE下的 “Shell” 窗口将打印对应的键值,如下图所示。按 “Ctrl+C” 或单击 退出程序。
,代码开始执行,你会看到的现象是:按下键盘,Thonny IDE下的 “Shell” 窗口将打印对应的键值,如下图所示。按 “Ctrl+C” 或单击 退出程序。

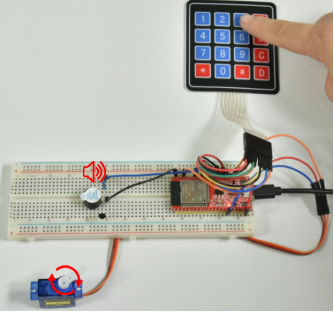
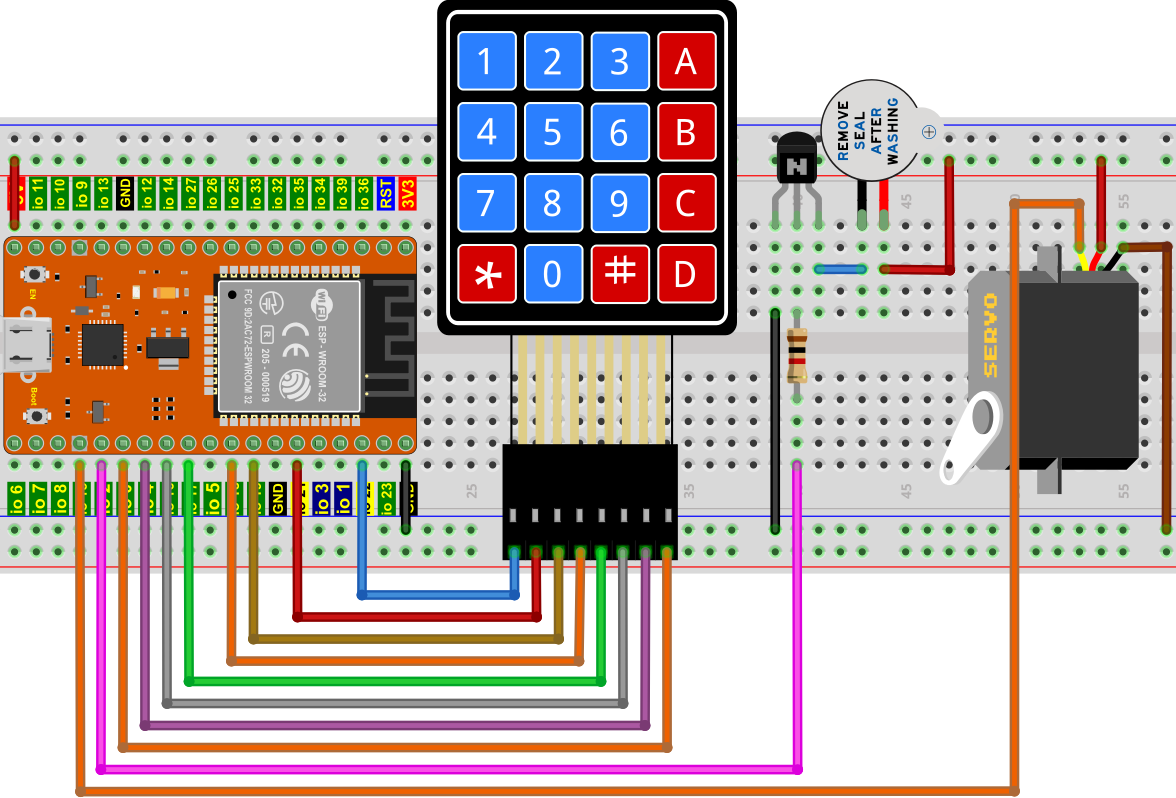
5. 密码锁的接线图:
在上一实验中,我们已经知道了4×4矩阵键盘的键值,接下来,我们使用4×4矩阵键盘作为键盘来控制舵机和蜂鸣器。
6. 项目代码:
你可以把代码移到任何地方。例如,我们将代码保存在 D盘 中,路径为D:\2. 项目教程。
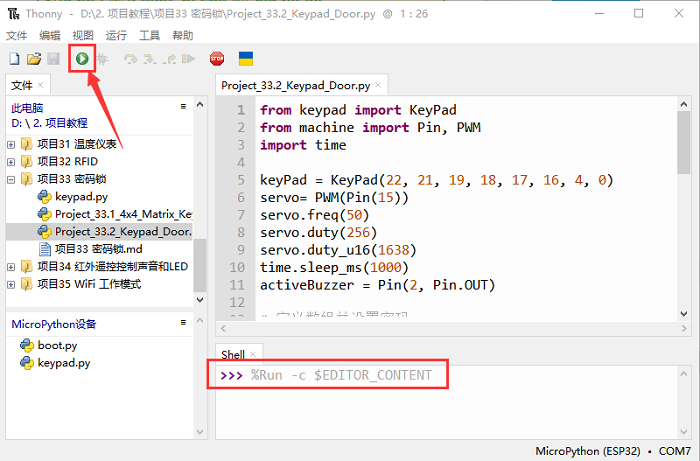
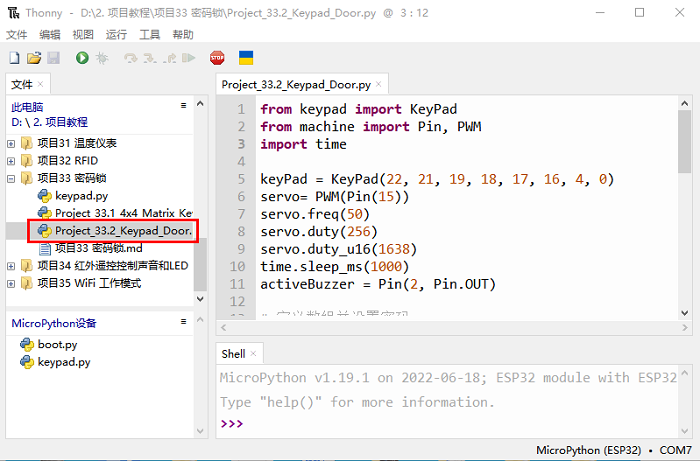
打开 “Thonny” 软件,点击 “此电脑” → “D:” → “2. 项目教程” → “项目33 密码锁”。选择 “keypad.py”,右键单击鼠标选择 “上传到/”,等待 “keypad.py” 被上传到ESP32. 并鼠标左键双击“Project_33.2_Keypad_Door.py”。
from keypad import KeyPad
from machine import Pin, PWM
import time
keyPad = KeyPad(22, 21, 19, 18, 17, 16, 4, 0)
servo= PWM(Pin(15))
servo.freq(50)
servo.duty(256)
servo.duty_u16(1638)
time.sleep_ms(1000)
activeBuzzer = Pin(2, Pin.OUT)
# 定义数组并设置密码.
passWord = "1234"
keyIn = ""
def key():
keyvalue = keyPad.scan()
if keyvalue != None:
print('Your input:', keyvalue)
time.sleep_ms(200)
return keyvalue
while True:
# 每次按下一个键,蜂鸣器就会短促地鸣叫一声,
# 键的键值将存储在keydata数组中.
keydata = key()
if keydata != None:
activeBuzzer.value(1)
time.sleep_ms(100)
activeBuzzer.value(0)
keyIn += keydata
# 当按下4个键时,判断密码是否正确。
# 如果正确,伺服将旋转90度,1秒后再转回来。
# 如果密码输入错误,蜂鸣器会长时间鸣叫一次,并清除keyInNum的值.
if len(keyIn) == 4:
if keyIn == passWord:
print("passWord right!")
servo.duty_u16(4915)
time.sleep_ms(1000)
servo.duty_u16(1638)
else:
print("passWord error!")
activeBuzzer.value(1)
time.sleep_ms(1000)
activeBuzzer.value(0)
keyIn = ""
7. 项目现象:
确保ESP32已经连接到电脑上,单击 。
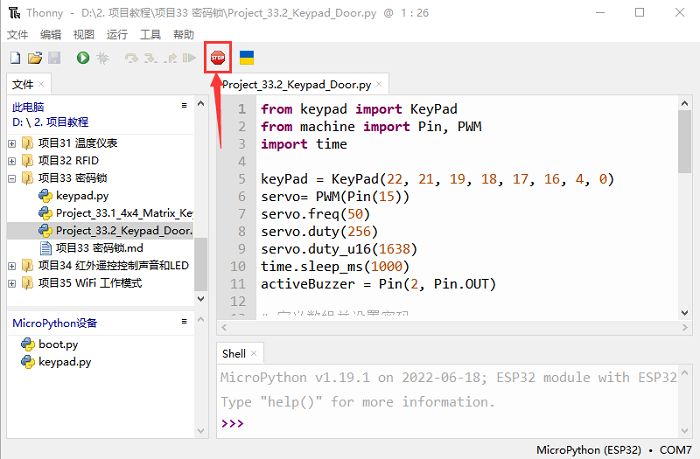
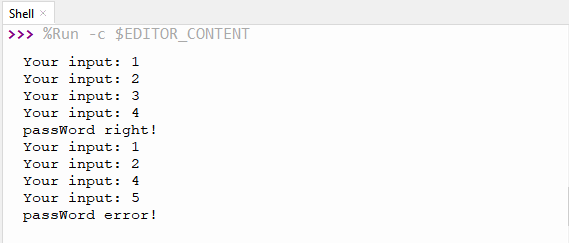
单击 ,代码开始执行,你会看到的现象是:按键盘输入4个字符的密码,如果输入正确(正确密码:1234),舵机会转动一定角度,然后回到原来的位置。如果输入错误,将发出输入错误警报。按 “Ctrl+C” 或单击 退出程序。