项目28 摇杆控制RGB灯#
1. 项目介绍:
摇杆模块是一个有两个模拟输入和一个数字输入的组件。广泛应用于游戏操作、机器人控制、无人机控制等领域。
在这个项目中,我们使用ESP32和摇杆模块控制RGB。这样,你可以在实践中对摇杆模块的原理和操作有更深入的了解。
2. 项目元件:
|
|
|
|
|---|---|---|---|
ESP32*1 |
面包板*1 |
摇杆模块*1 |
RGB LED*1 |
|
|
|
|
220Ω电阻*3 |
跳线若干 |
USB 线*1 |
5P转杜邦线公单*1 |






3. 元件知识:
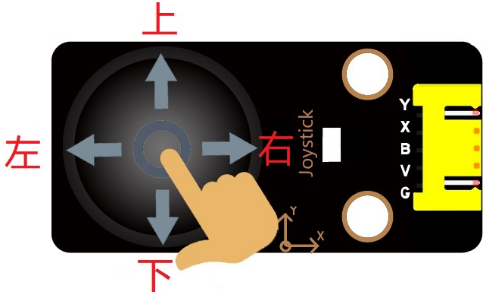
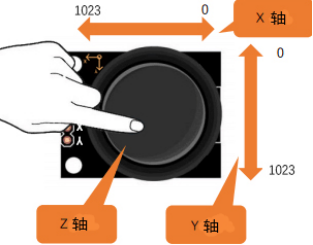
摇杆模块: 主要是采用PS2手柄摇杆元件,实际上摇杆模块有3个信号端引脚,模拟3维空间,摇杆模块的引脚分别是GND、VCC、信号端(B、X、Y),其中信号端X、Y模拟空间的X轴和Y轴,控制时,模块的X、Y信号端是连接控制板模拟口,通过控制2个模拟输入值来控制物体在空间X、Y轴的坐标。信号端B模拟空间Z轴,它一般是接数字口,做按键使用。
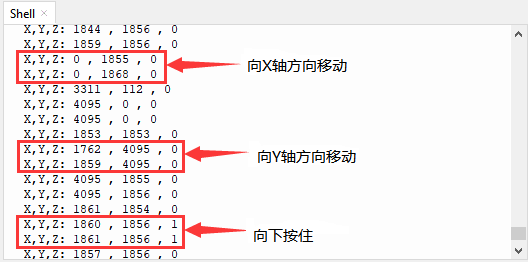
VCC接控制板的电源输出端V/VCC(3.3/5V),GND接控制板的G/GND,原始状态下读出电压大约为1.65V/2.5V左右,对于X轴方向,当随箭头方向逐渐移动,读出电压值随着增加,且可以达到最大电压;随箭头相反方向逐渐移动,读出电压值逐渐减少,减少到最小电压。对于Y轴方向,当沿着模块上的箭头方向逐渐按下,读出电压值随着增加,且可以达到最大电压;随箭头相反方向逐渐按下,读出电压值逐渐减少,减少到最小电压。对于Z轴方向,信号端B接数字口,原始状态下输出0,按下输出1。这样,我们可以读取两个模拟值和一个数字口的高低电平情况,来判断模块上摇杆的工作状态。
模块参数:
输入电压:DC 3.3V ~ 5V
输出信号:X/Y双轴模拟值+Z轴数字信号
适用范围:适用于控制点坐标在平面内的运动,双自由度舵机的控制等。
产品特点:外观精美,摇杆手感优越,操作简单,反应灵敏,使用寿命长。
4. 读取摇杆模块的值:
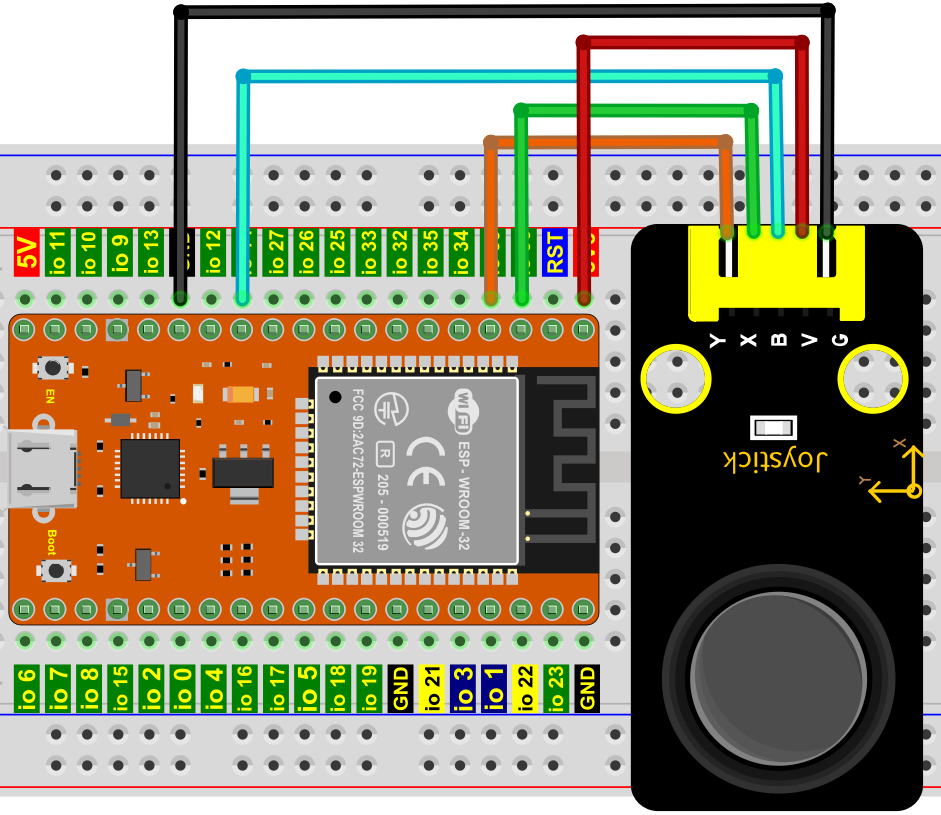
我们必须使用ESP32的模拟IO口从摇杆模块的X/Y引脚读取值,并使用数字IO口读取按钮的数字信号。请按照下面的接线图进行接线:
你可以把代码移到任何地方。例如,我们将代码保存在 D盘 中,路径为D:\2. 项目教程。
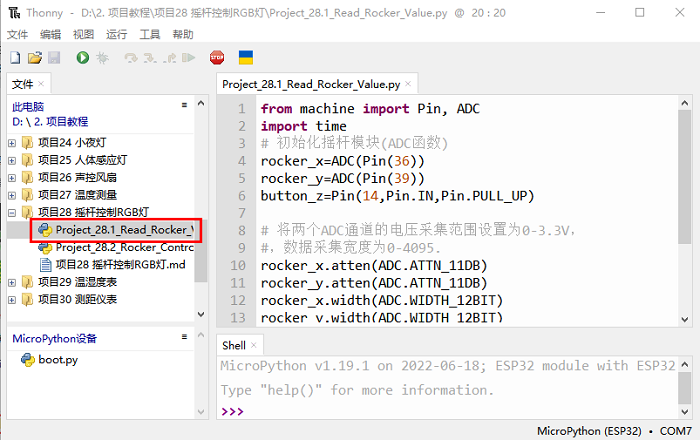
打开 “Thonny” 软件,点击 “此电脑” → “D:” → “2. 项目教程” → “项目28 摇杆控制RGB灯”。并鼠标左键双击 “Project_28.1_Read_Rocker_Value.py”。
from machine import Pin, ADC
import time
# 初始化摇杆模块(ADC函数)
rocker_x=ADC(Pin(36))
rocker_y=ADC(Pin(39))
button_z=Pin(14,Pin.IN,Pin.PULL_UP)
# 将两个ADC通道的电压采集范围设置为0-3.3V,
#,数据采集宽度为0-4095.
rocker_x.atten(ADC.ATTN_11DB)
rocker_y.atten(ADC.ATTN_11DB)
rocker_x.width(ADC.WIDTH_12BIT)
rocker_y.width(ADC.WIDTH_12BIT)
# 在代码中,将Z_Pin配置为上拉输入模式。
# 在loop()中,使用Read()读取X轴和Y轴的值
# 和使用value()来读取Z轴的值,然后显示它们.
while True:
print("X,Y,Z:",rocker_x.read(),",",rocker_y.read(),",",button_z.value())
time.sleep(0.5)
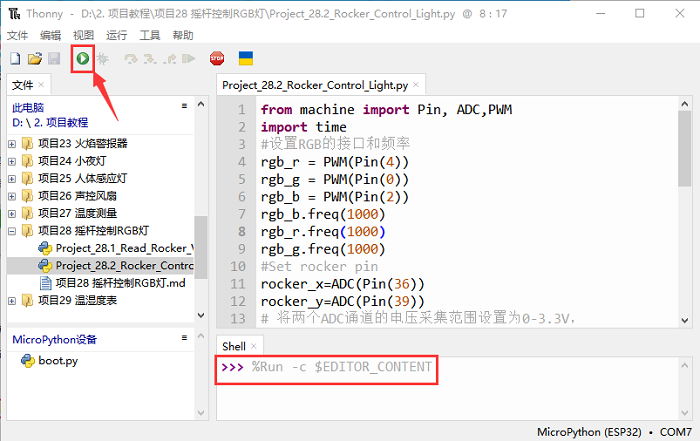
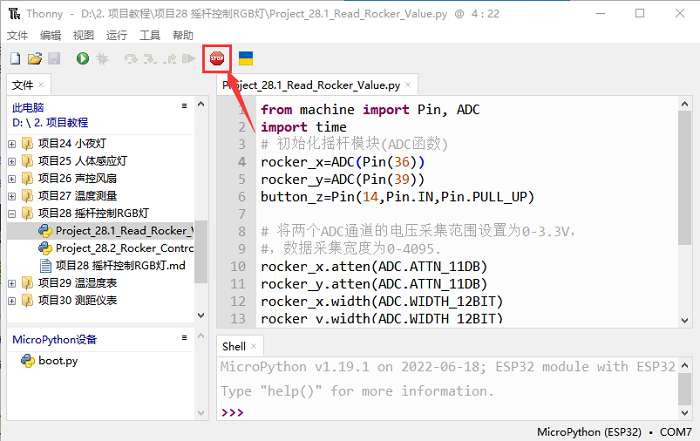
确保ESP32已经连接到电脑上,单击  。
。
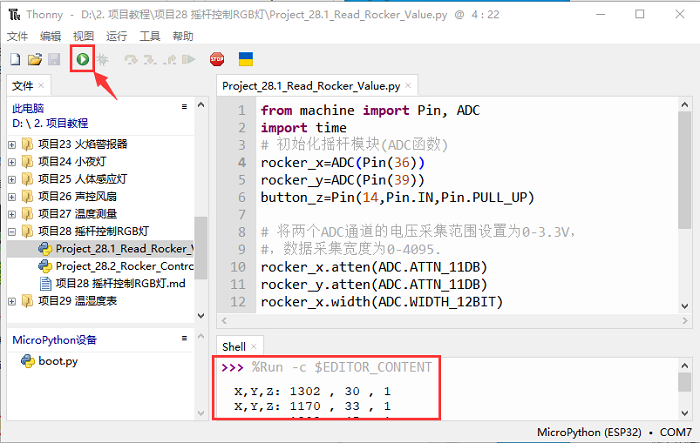
单击  ,代码开始执行,你会看到的现象是:Thonny IDE下的 “Shell” 窗口将打印当前摇杆的模拟值和数字值,移动摇杆或按下摇杆帽将改变 “Shell” 中的模拟值和数字值。按 “Ctrl+C” 或单击 退出程序。
,代码开始执行,你会看到的现象是:Thonny IDE下的 “Shell” 窗口将打印当前摇杆的模拟值和数字值,移动摇杆或按下摇杆帽将改变 “Shell” 中的模拟值和数字值。按 “Ctrl+C” 或单击 退出程序。
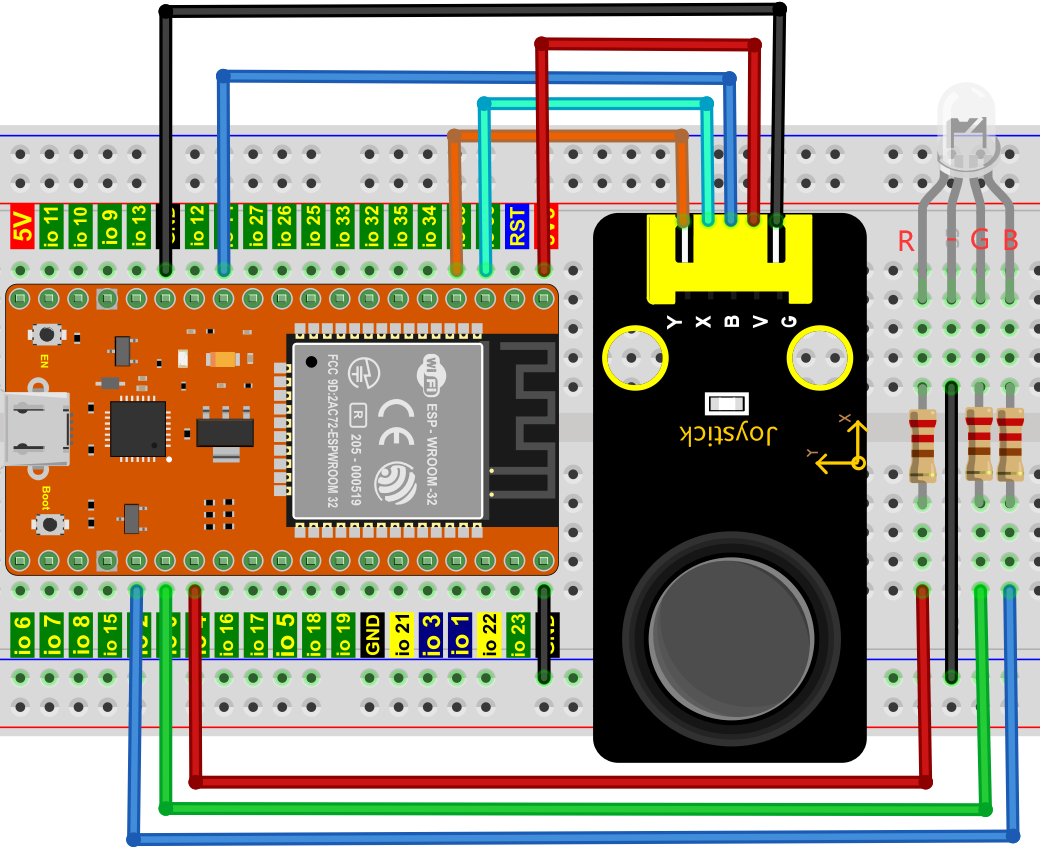
5. 摇杆模块控制RGB的接线图:
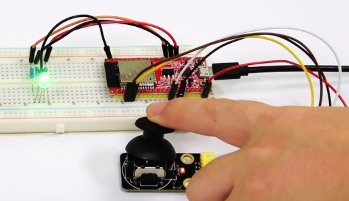
我们刚读了摇杆模块的值,这里我们需要用摇杆模块和RGB做一些事情,按照下图连接:
6. 项目代码:
你可以把代码移到任何地方。例如,我们将代码保存在 D盘 中,路径为D:\2. 项目教程。
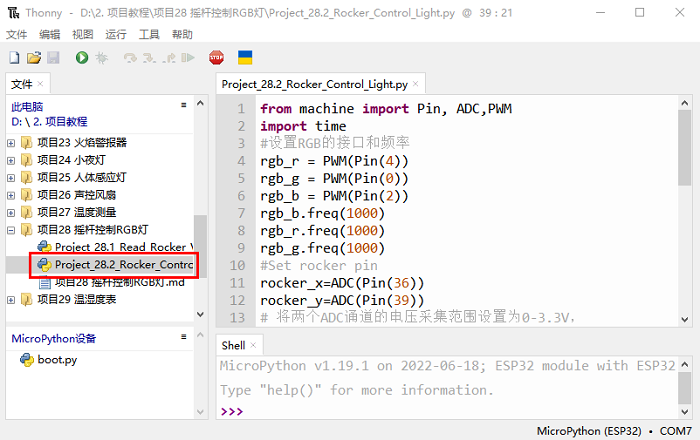
打开 “Thonny” 软件,点击 “此电脑” → “D:” → “2. 项目教程” → “项目28 摇杆控制RGB灯”。并鼠标左键双击 “Project_28.2_Rocker_Control_Light.py”。
from machine import Pin, ADC,PWM
import time
#设置RGB的接口和频率
rgb_r = PWM(Pin(4))
rgb_g = PWM(Pin(0))
rgb_b = PWM(Pin(2))
rgb_b.freq(1000)
rgb_r.freq(1000)
rgb_g.freq(1000)
#Set rocker pin
rocker_x=ADC(Pin(36))
rocker_y=ADC(Pin(39))
# 将两个ADC通道的电压采集范围设置为0-3.3V,
# 数据采集宽度为0-4095.
rocker_x.atten(ADC.ATTN_11DB)
rocker_y.atten(ADC.ATTN_11DB)
rocker_x.width(ADC.WIDTH_12BIT)
rocker_y.width(ADC.WIDTH_12BIT)
while True:
y = rocker_y.read()#得到摇杆模块的Y值
x = rocker_x.read()#得到摇杆模块的X值
if x < 1000: #左
rgb_b.duty(0)
rgb_r.duty(1023)
rgb_g.duty(0)
elif x > 3000: #右
rgb_b.duty(0)
rgb_r.duty(0)
rgb_g.duty(1023)
elif y < 1000: #下
rgb_b.duty(1023)
rgb_r.duty(0)
rgb_g.duty(0)
elif y > 3000: #上
rgb_b.duty(1023)
rgb_r.duty(1023)
rgb_g.duty(1023)
time.sleep(0.01)
7. 项目现象:
确保ESP32已经连接到电脑上,单击 。
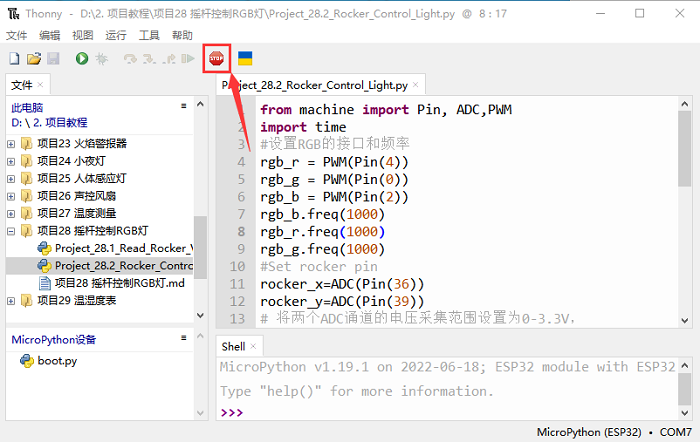
单击 ,代码开始执行,你会看到的现象是:①如果摇杆在X方向上移动到最左边,RGB光变成红色; ②如果摇杆在X方向上移动到最右边,RGB光变为绿色; ③如果摇杆在Y方向上移动到最上面,RGB光变成白色; ④如果摇杆在Y方向上移动到最下面,RGB光变成蓝色。按 “Ctrl+C” 或单击 退出程序。