项目19 舵机#
1. 项目介绍:
舵机是一种可以非常精确地旋转的电机。目前已广泛应用于玩具车、遥控直升机、飞机、机器人等领域。
在这个项目中,我们将使用ESP32控制舵机转动。
2. 项目元件:
|
|
|
|---|---|---|
ESP32*1 |
面包板*1 |
舵机*1 |
|
|
|
跳线若干 |
USB 线*1 |



3. 元件知识:

舵机: 舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0度到180 度。
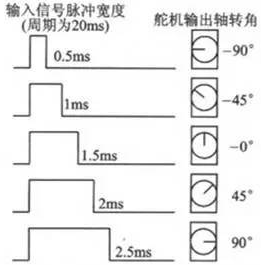
控制舵机的脉冲周期为20ms,脉冲宽度为0.5ms ~ 2.5ms,对应位置为-90°~ +90°。下面是以一个180°角的舵机为例:
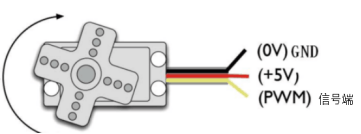
舵机有多种规格,但它们都有三根连接线,分别是棕色、红色、橙色(不同品牌可能有不同的颜色)。棕色为GND,红色为电源正极,橙色为信号线。
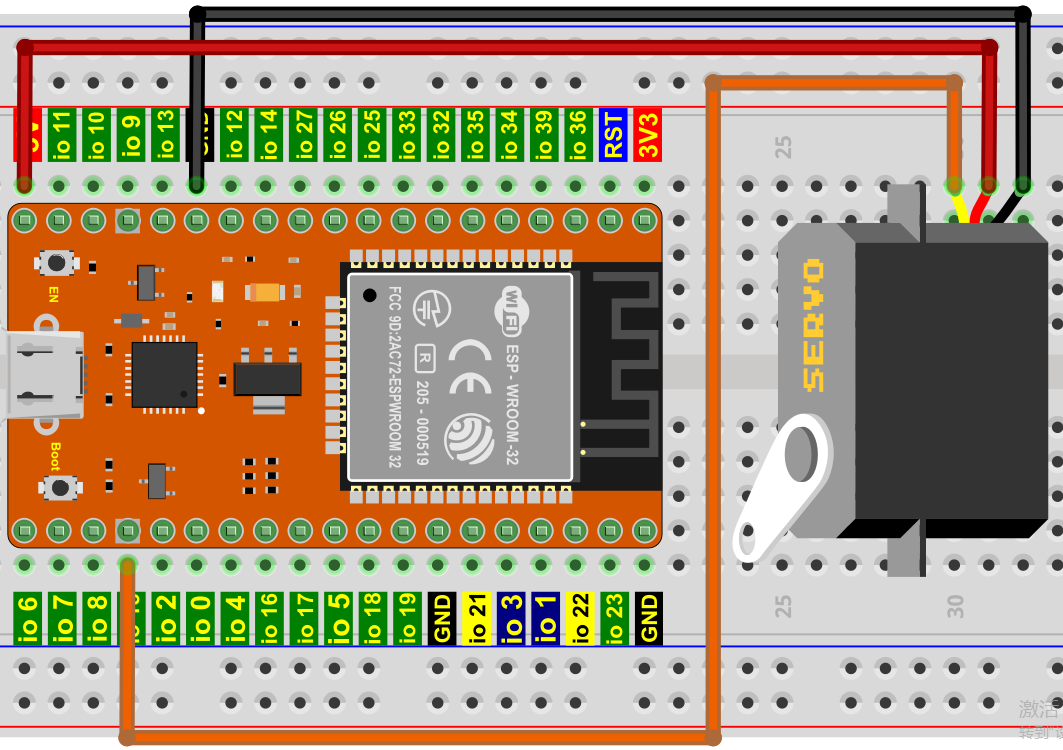
4. 项目接线图:
舵机供电时请注意,电源电压应为3.3V-5V。请确保在将舵机连接到电源时不会出现任何错误。
5. 项目代码:
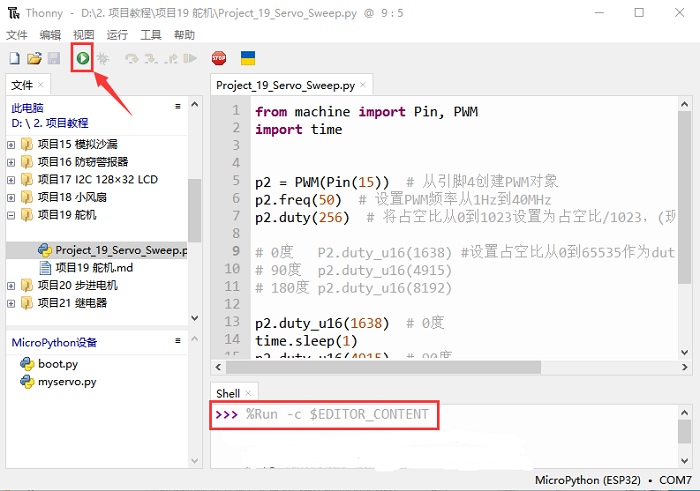
你可以把代码移到任何地方。例如,我们将代码保存在 D盘 中,路径为D:\2. 项目教程。
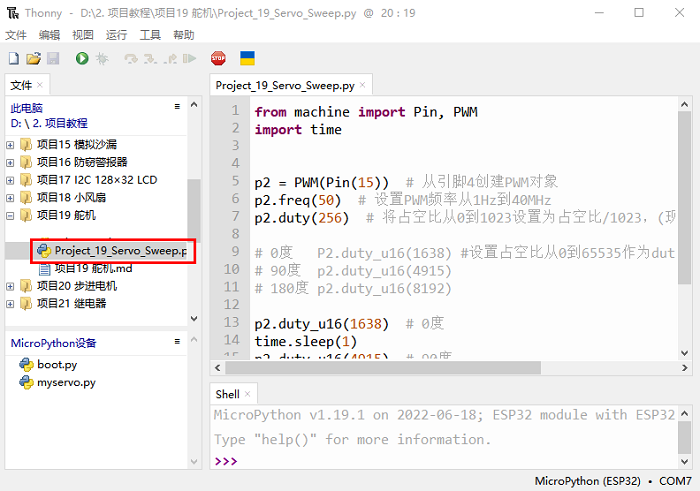
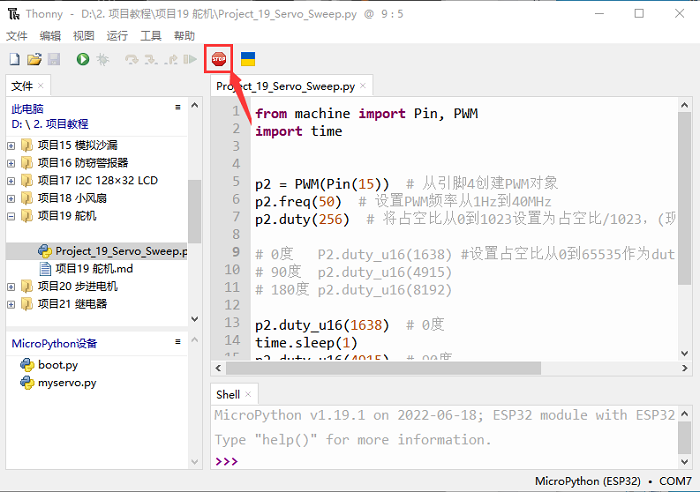
打开 “Thonny” 软件,点击 “此电脑” → “D:” → “2. 项目教程” → “项目19 舵机”。并鼠标左键双击 “Project_19_Servo_Sweep.py”。
from machine import Pin, PWM
import time
p2 = PWM(Pin(15)) # 从引脚15创建PWM对象
p2.freq(50) # 设置PWM频率从1Hz到40MHz
p2.duty(256) # 将占空比从0到1023设置为占空比/1023,(现在是25%)
# 0度 P2.duty_u16(1638) #设置占空比从0到65535作为duty_u16/65535的比值
# 90度 p2.duty_u16(4915)
# 180度 p2.duty_u16(8192)
p2.duty_u16(1638) # 0度
time.sleep(1)
p2.duty_u16(4915) # 90度
time.sleep(1)
p2.duty_u16(8100) # 180度 # 真实舵机MG90S可以设为8192
time.sleep(1)
for i in range(1638, 8100, 10):
p2.duty_u16(i)
time.sleep_ms(10)
p2.duty_u16(1638)
time.sleep(1)
p2.deinit() # 在引脚上关闭PWM
6. 项目现象:
确保ESP32已经连接到电脑上,单击  。
。
单击  ,代码开始执行,你会看到的现象是:舵机将转动。按 “Ctrl+C” 或单击 退出程序。
,代码开始执行,你会看到的现象是:舵机将转动。按 “Ctrl+C” 或单击 退出程序。