项目20 步进电机#
1. 项目介绍:
步进电机定位准确,是工业机器人、3D打印机、大型车床等机械设备中最重要的部件。
在这个项目中,我们将使用ESP32控制ULN2003步进电机驱动板来驱动步进电机转动。
2. 项目元件:
|
|
|
|---|---|---|
ESP32*1 |
面包板*1 |
ULN2003步进电机驱动板*1 |
|
|
|
面包板专用电源模块*1 |
6节5号电池盒*1 |
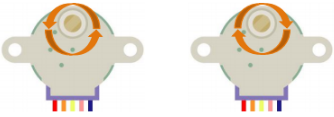
步进电机*1 |
|
|
|
公对母杜邦线若干 |
5号电池(自备)*6 |
USB 线*1 |






3. 项目知识:

步进电机: 是由一系列电磁线圈控制的电机。它可以根据需要旋转精确的度数(或步数),允许你将它移动到一个精确的位置并保持该位置。它是通过在很短的时间内为电机内部的线圈供电来做到这一点的,但你必须一直为电机供电,以保持它在你想要的位置。有两种基本类型的步进电机,单极步进和双极步进。在本项目中,我们使用的是单极步进电机28-BYJ48。
28BYJ-48步进电机工作原理:
步进电机主要由定子和转子组成,定子是固定不动的,如下图绕着A、B、C、D线圈组的部分,线圈组导通电就会产生磁场;转子就是转动的部分,如下图定子中间的部分,两极是永磁铁。
单步4节拍的转动原理:开始A组线圈导通,转子两极正对着A组线圈;接着A组线圈断开,B组线圈导通,转子就会顺时针转到B组线圈,转子转了一步;B断开,C导通,转子转到C组;C断开,D导通,转子转到D组;D组断开,A组导通,转子转到A组线圈。这样转子就转了半圈180度,接着再重复一次,B-C-D-A,转子转回到A组线圈,这样转子就转了一圈,总共转动了8步。如下图所示,这就是步进电机单节拍转动的原理A - B - C - D - A …。
如果想让步进电机逆时针转动,那只要把节拍顺序反过来就行,D - C - B - A - D …。
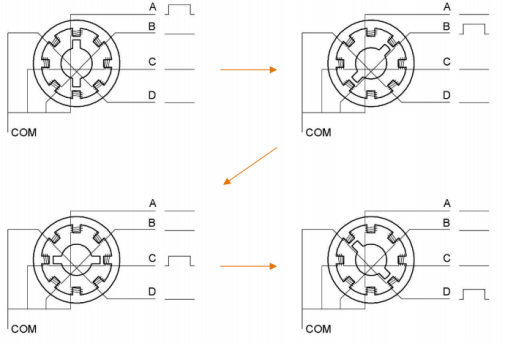
半步8节拍转动原理:8节拍,采用的是单双拍的形式,A - AB - B - BC - C - CD - D - DA - A … ,这样运转一拍,转子只会转动半步,例如,A组线圈导通,转子转到正对着A组线圈;接着A和B组一起导通,这样产生的磁场最强的地方在AB组线圈中间,转子两极就会转到AB组线圈中间,也就是顺时针转了半步。
步进电机参数:
我们所提供的步进电机需要转动32步,转子才能转一圈,还经过了1:64的减速齿轮组带动输出轴,这样输出轴转动一圈需要:32 * 64 = 2048 步。
电压5V,4相步进电机 ,4节拍模式的步进角为11.25, 8节拍模式步进角为5.625, 减速比为1:64。
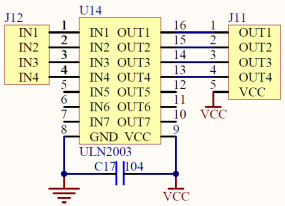
ULN2003步进电机驱动板: ULN2003型步进电机驱动器,将微弱信号转换为更强的控制信号,从而驱动步进电机。
下面的原理图显示了如何使用ULN2003步进电机驱动板接口将一个单极步进电机接到ESP32的引脚上,并显示了如何使用四个TIP120的接口。
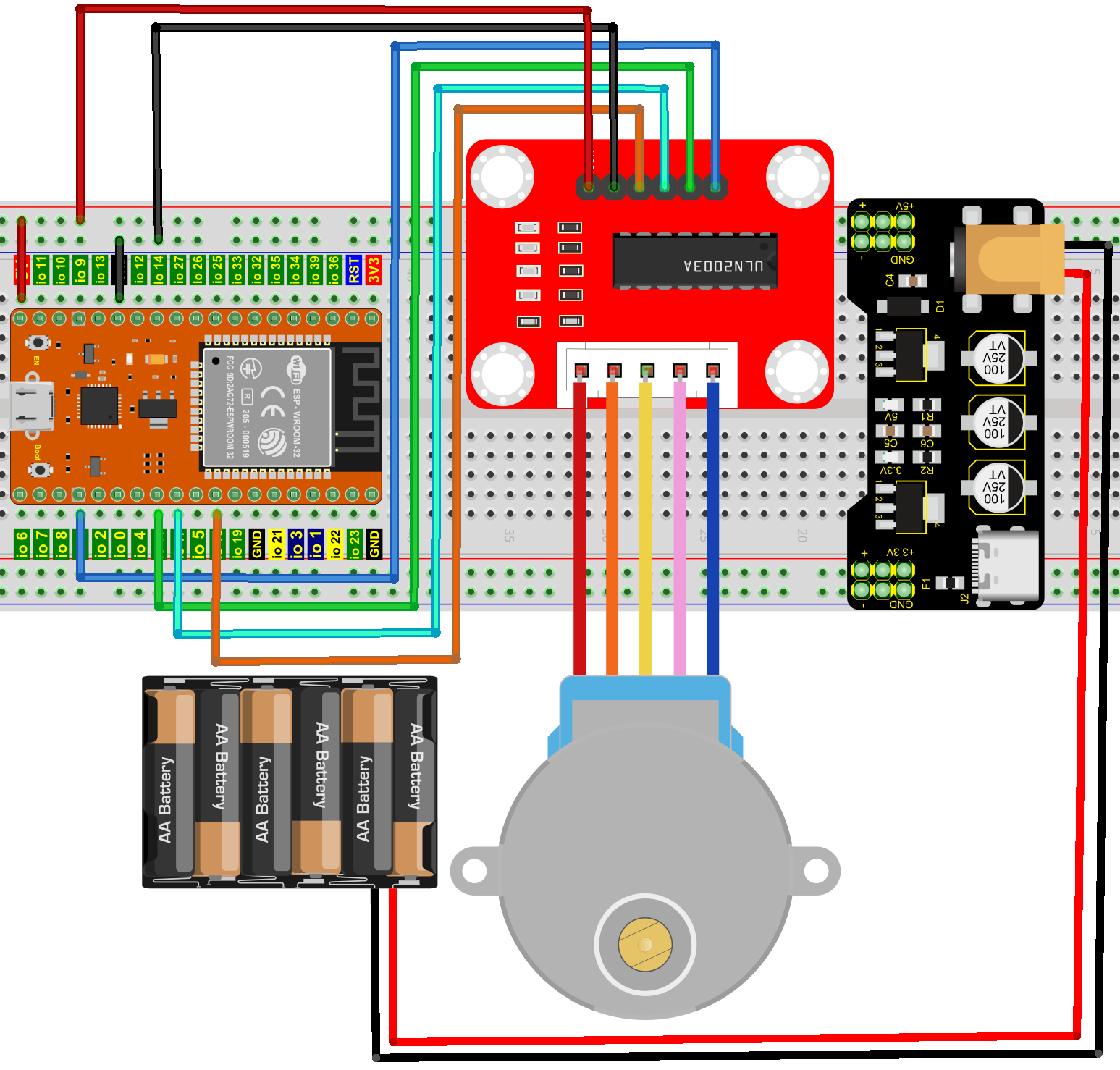
4. 项目接线图:
5. 项目代码:
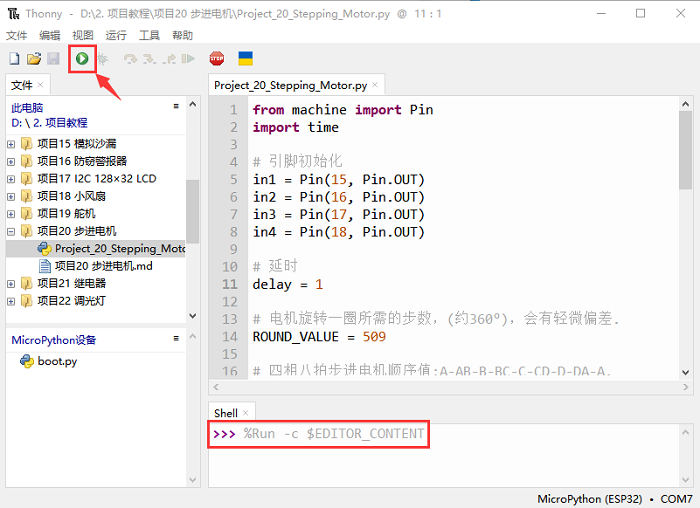
你可以把代码移到任何地方。例如,我们将代码保存在 D盘 中,路径为D:\2. 项目教程。
打开 “Thonny” 软件,点击 “此电脑” → “D:” → “2. 项目教程” → “项目20 步进电机”。并鼠标左键双击 “Project_20_Stepping_Motor.py”。
from machine import Pin
import time
# 引脚初始化
in1 = Pin(15, Pin.OUT)
in2 = Pin(16, Pin.OUT)
in3 = Pin(17, Pin.OUT)
in4 = Pin(18, Pin.OUT)
# 延时
delay = 1
# 电机旋转一圈所需的步数,(约360°),会有轻微偏差.
ROUND_VALUE = 509
# 四相八拍步进电机顺序值:A-AB-B-BC-C-CD-D-DA-A.
STEP_VALUE = [
[1, 0, 0, 0],
[1, 1, 0, 0],
[0, 1, 0, 0],
[0, 1, 1, 0],
[0, 0, 1, 0],
[0, 0, 1, 1],
[0, 0, 0, 1],
[1, 0, 0, 1],
]
# 引脚输出电平低
def reset():
in1(0)
in2(0)
in3(0)
in4(0)
# 如果count是正整数,则顺时针旋转,如果count是负整数,则逆时针旋转
def step_run(count):
direction = 1 # 顺时针转
if count < 0:
direction = -1 # 逆时针旋转
count = -count
for x in range(count):
for bit in STEP_VALUE[::direction]:
in1(bit[0])
in2(bit[1])
in3(bit[2])
in4(bit[3])
time.sleep_ms(delay)
reset()
# 如果a是正整数,则顺时针旋转,如果a是负整数,则逆时针旋转
def step_angle(a):
step_run(int(ROUND_VALUE * a / 360))
# 循环:顺时针转一圈,再逆时针转一圈.
while True:
step_run(509)
step_run(-509)
step_angle(360)
step_angle(-360)
6. 项目现象:
确保ESP32已经连接到电脑上,单击  。
。
单击  ,代码开始执行,你会看到的现象是:ULN2003驱动模块上的D1,D2,D3,D4四个LED点亮,步进电机先逆时针旋转,再顺时针旋转,并保持此状态循环。按 “Ctrl+C” 或单击 退出程序。
,代码开始执行,你会看到的现象是:ULN2003驱动模块上的D1,D2,D3,D4四个LED点亮,步进电机先逆时针旋转,再顺时针旋转,并保持此状态循环。按 “Ctrl+C” 或单击 退出程序。