第14课 红外遥控智能车#
(1)项目介绍:#
前面的学习中我们详细的介绍了智能车上各个传感器、模块、扩展板的使用方法。在这里我们可以再结合前面课程中知识制作一个红外控制智能车。在传感器项目第四课中,我们已经测试出红外遥控器各个按键对应的键值。实验中,我们可以通过代码设置(键值),让对应的按键控制智能车对应的运动状态,且相应的状态模式显示在8X16 LED矩阵上。
(2)流程图:#
循迹智能车具体逻辑如下表格:
按键: |
键值:16736925 |
状态:前进 |
|---|---|---|
按键: |
键值:16754775 |
状态:后退 |
按键: |
键值:16720605 |
状态:左转 |
按键: |
键值:16761405 |
状态:右转 |
按键: |
键值:16712445 |
状态:停止 |





按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
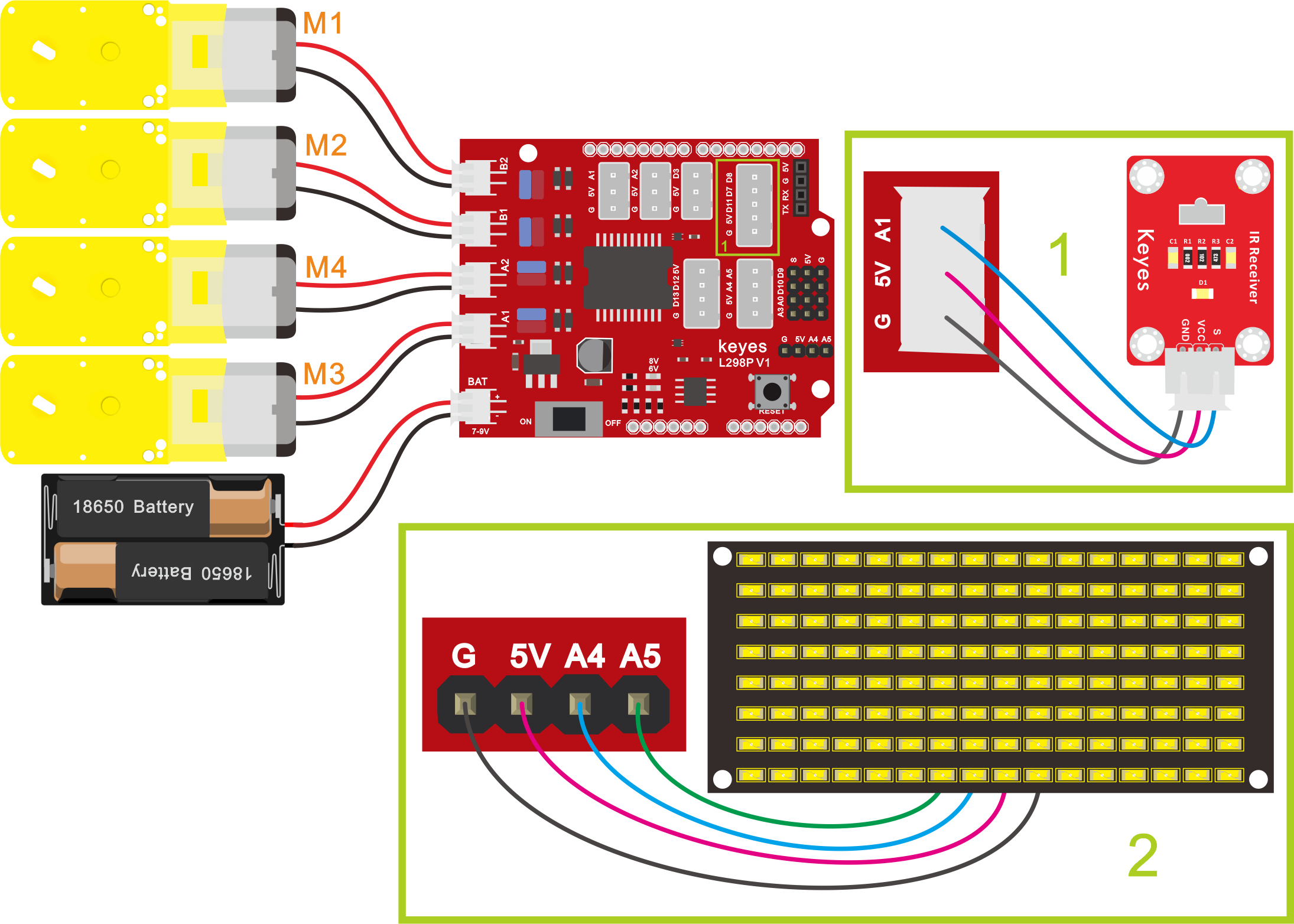
(3)接线图:电机+红外接收模块#
接线注意:由于红外接收传感器输入的数字信号,将红外接收传感器模块用导线连接到电机驱动扩展板上的G、V、A1 ; A、B两组电机分别对应的连接到堆叠在UNO Plus板上的电机驱动扩展板上的接口A和接口B,电源接到BAT接口。
(4)测试代码:#
添加红外传感器

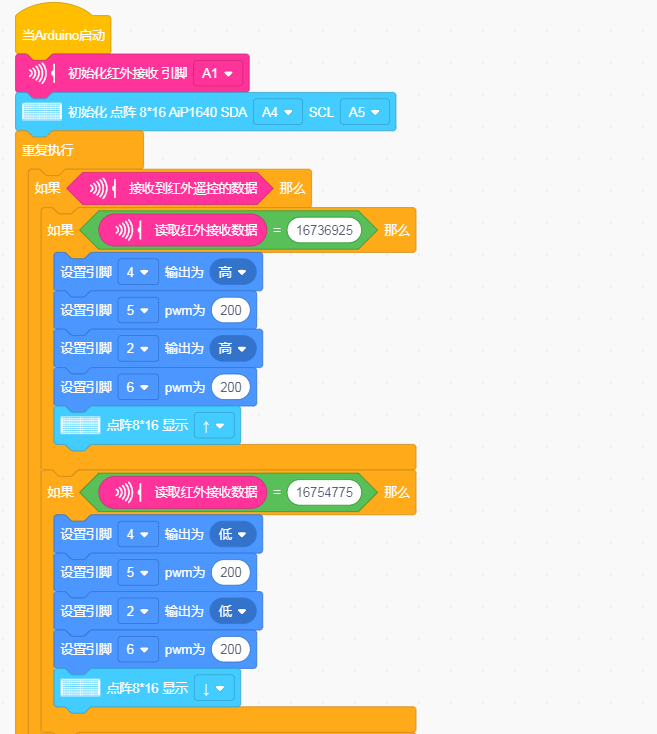
在事件栏拖出Arduino启动模块
在红外栏拖出舒适化红外接收模块,设置引脚为A1
初始化点阵

在控制栏拖出重复执行模块

在控制栏拖出判断模块,判断是否有接收到红外遥控的数据
在控制栏拖出判断模块,并判断“读取红外数据”是否等于“16736925”如果是则执行小车前进代码,点阵显示前进箭头

在控制栏拖出判断模块,并判断“读取红外数据”是否等于“16754775”如果是则执行小车后退代码,点阵显示后退箭头

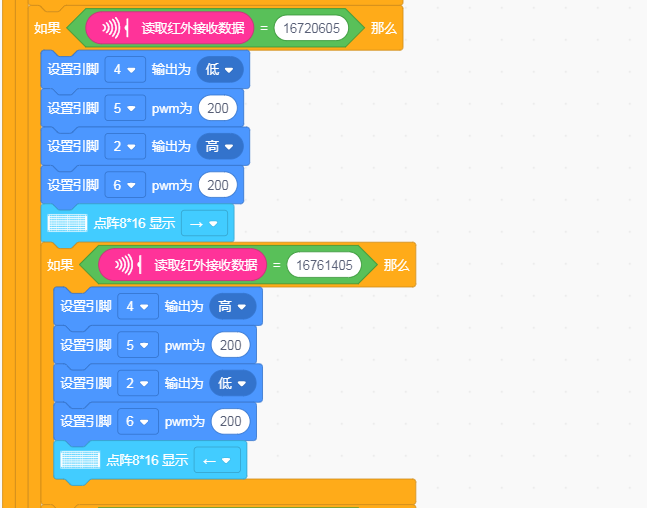
在控制栏拖出判断模块,并判断“读取红外数据”是否等于“16720605”如果是则执行小车左转代码,点阵显示左转箭头(由于左右箭头的代码块是按照点阵面向自己的方向做的,所以左右箭头在指示小车状态的时候刚好相反)

在控制栏拖出判断模块,并判断“读取红外数据”是否等于“16761405”如果是则执行小车右转代码,点阵显示右转箭头(由于左右箭头的代码块是按照点阵面向自己的方向做的,所以左右箭头在指示小车状态的时候刚好相反)

在控制栏拖出判断模块,并判断“读取红外数据”是否等于“16712445”如果是则执行小车停止代码,点阵显示“STOP”

在红外栏拖出刷新红外接收数据
(注意:在上传测试代码前,需要把蓝牙模块取下,否则测试代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)

(5)测试结果:#
将驱动扩展板堆叠在UNO Plus板上,上传好代码,按照接线图接线,将拨码开关拨至ON端后,我们就能用红外遥控控制智能车运动了。