第02课 亮度调节#
(1)项目介绍:#
前面课程中,我们详细的介绍了通过代码控制LED亮灭,实现闪烁的效果。这节课我们使用PWM来控制LED亮度不断地变化,模拟我们呼吸的效果。
PWM是使用数字手段来控制模拟输出的一种手段。使用数字控制产生占空比不同的方波(一个不停在高电平与低电平之间切换的信号)来控制模拟输出。一般来说端口的输入电压只有两个0V与5V。如果想要改变灯的亮度怎么办呢个?有同学说串联电阻,对,这个方法是正确的。但是,如果想要得到不同的亮度,且在不同亮度之间来回变动怎么办呢?不可能不停地切换电阻吧。这种情况下就需要使用PWM了,那它是怎么控制的呢?
对于Arduino的数字端口电压输出只有LOW与HIGH两个,对应的就是0V与5V的电压输出,可以把LOW定义为0,HIGH定义为1,1秒内让Arduino输出500个0或者1的信号。如果这500个全部为1,那就是完整的5V,如果全部为0,那就是0V。如果010101010101这样输出,刚好一半,端口输出的平均电压就为2.5V了。这个和放映电影是一个道理,咱们所看的电影并不是完全连续的,它其实是每秒输出25张图片。在这种情况下,人的肉眼是分辨不出来的,看上去就是连续的了。PWM也是同样的道理,如果想要不同的电压,就控制0与1的输出比例控制就可以了。当然这和真实的连续输出还是有差别的,单位时间内输出的0,1信号越多,控制的就越精确。
(2)项目组件:#
keyes PLUS 开发板*1 |
Keyes brick L298P 电机驱动扩展板 V1*1 |
keyes 草帽LED白发红模块*1 |
|---|---|---|
|
|
|
USB线*1 |
3Pin 双母头杜邦线*1 |
18650双节电池盒*1 |
|
|
|


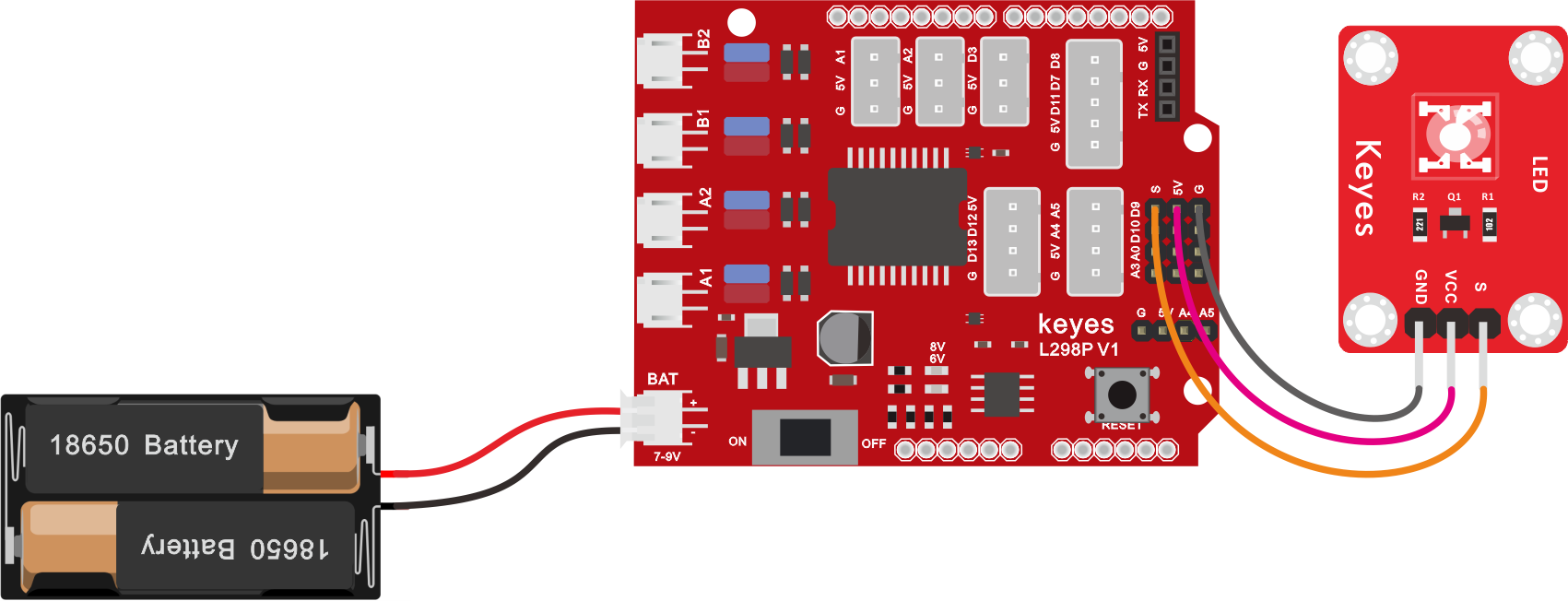
(3)接线图:#
Arduino的PWM引脚在3,5,6,9,10,11,上一小节的接线刚刚好在9脚,所以我们这个接线不用变
(4)项目代码:#
示例代码 1(KE0165_2.1.ino):
/*
keyes 4WD 多功能智能车
课程 2.1
PWM 控制
http://www.keyes-robot.com
*/
#define LED_PIN 9 // LED 灯引脚
int value;
void setup() {
pinMode(LED_PIN, OUTPUT); // 初始化 LED 引脚为输出模式
}
/* 功能:LED 灯光渐亮渐暗循环 */
void loop() {
for (value = 0; value < 255; value = value + 1) {
analogWrite(LED_PIN, value); // LED 灯逐渐变亮
delay(5); // 延时 5 毫秒
}
for (value = 255; value > 0; value = value - 1) {
analogWrite(LED_PIN, value); // LED 灯逐渐变暗
delay(5); // 延时 5 毫秒
}
}
(5)项目结果:#
代码下载完成后,我们可以看到LED会有个逐渐由亮到灭的一个缓慢过程,而不是直接的亮灭,如同呼吸一般,均匀变化。
(6)代码说明:#
当我们需要重复执行某句话时,我们可以使用for语句。
for语句格式如下:
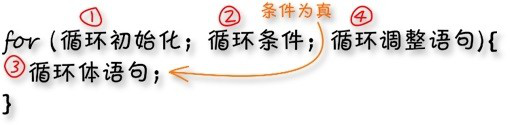
for循环顺序如下:
第一轮:1 → 2 → 3 → 4
第二轮:2 → 3 → 4
…
直到2不成立,for循环结束。
知道了这么个顺序之后,回到代码中:
for (int value = 0; value < 255; value=value+1){
...}
for (int value = 255; value >0; value=value-1){
...}
这两个for语句实现了value的值不断由0增加到255,随之在从255减到0,在增加到255……,无限循环下去。
再看下for里面,涉及一个新函数analogWrite()。
我们知道数字口只有0和1两个状态,那如何发送一个模拟值到一个数字引脚呢?就要用到该函数。观察一下Arduino板,查看数字引脚,你会发现其中6个引脚旁标有“~”,这些引脚不同于其他引脚,它们可以输出PWM信号。
函数格式如下:
analogWrite(pin,value)
analogWrite()函数用于给PWM口写入一个0~255的模拟值。所以,value是在0~255之间的值。特别注意的是,analogWrite()函数只能写入具有PWM功能的数字引脚,也就是3,5,6,9,10,11引脚。
PWM是一项通过数字方法来获得模拟量的技术。数字控制来形成一个方波,方波信号只有开关两种状态(也就是我们数字引脚的高低)。通过控制开与关所持续时间的比值就能模拟到一个0到5V之间变化的电压。开(学术上称为高电平)所占用的时间就叫做脉冲宽度,所以PWM也叫做脉冲宽度调制。
通过下面五个方波来更形象的了解一下PWM。
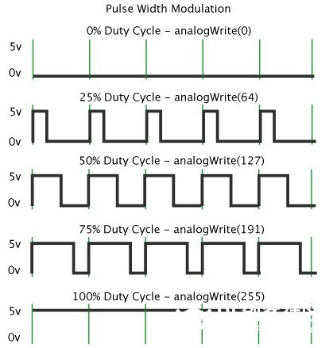
PWM示意图
上图绿色竖线代表方波的一个周期。每个analogWrite(value)中写入的value都能对应一个百分比,这个百分比也称为占空比(Duty Cycle),指的是高电平在周期内占的时间比值,也就是:占空比=高电平时间 / 周期时间。图中,从上往下,第一个方波,占空比为0%,对应的value为0。LED亮度最低,也就是灭的状态。高电平持续时间越长,也就越亮。所以,最后一个占空比为100%的对应value是255,LED最亮。50%就是最亮的一半了,25%则相对更暗。
PWM比较多的用于调节LED灯的亮度。或者是电机的转动速度,电机带动的车轮速度也就能很容易控制了,在玩一些Arduino机器人时,更能体现PWM的好处。
(7)项目拓展:#
我们不改变灯的脚位,只是改变程序里面delay的值,看看它如何改变渐变效果。
示例代码 2(KE0165_2.2.ino):
/*
keyes 4WD 多功能智能车
课程 2.2
PWM 控制
http://www.keyes-robot.com
*/
#define LED_PIN 9 // LED 灯引脚
/* 功能:初始化设置 */
void setup() {
pinMode(LED_PIN, OUTPUT); // 初始化 LED 引脚为输出模式
}
/* 功能:主循环,LED 灯渐亮渐暗 */
void loop() {
for (int value = 0; value < 255; value = value + 1) {
analogWrite(LED_PIN, value); // LED 灯逐渐变亮
delay(30); // 延时 30 毫秒
}
for (int value = 255; value > 0; value = value - 1) {
analogWrite(LED_PIN, value); // LED 灯逐渐变暗
delay(30); // 延时 30 毫秒
}
}
上传代码到开发板,看LED渐变的效果是不是慢了一些。