第10课 画地为牢智能车#
项目介绍:#
前面我们详细的介绍了智能车上各个传感器、模块、扩展板的使用方法。在这里我们可以结合前面课程中知识制作一个画地为牢智能车。实验中,我们通过循迹传感器检测智能车底部是否存在黑线,然后根据检测结果控制两个电机的转动,从而把智能车关在黑线圈中即画地为牢。
流程图:#
画地为牢智能车具体逻辑如下表格。
检测 |
中循迹传感器 |
检测到黑线:高电平 |
检测到黑线:高电平 |
|---|---|---|---|
检测 |
中循迹传感器 |
检测到白线:低电平 |
检测到白线:低电平 |
检测 |
左循迹传感器 |
检测到黑线:高电平 |
检测到黑线:高电平 |
检测 |
左循迹传感器 |
检测到白线:低电平 |
检测到白线:低电平 |
检测 |
右循迹传感器 |
检测到黑线:高电平 |
检测到黑线:高电平 |
检测 |
右循迹传感器 |
检测到白线:低电平 |
检测到白线:低电平 |
条件 |
条件 |
条件 |
状态 |
左循迹传感器没检测到黑线 且中循迹传感器没检测到黑线且右循迹传感器没检测到黑线 |
左循迹传感器没检测到黑线 且中循迹传感器没检测到黑线且右循迹传感器没检测到黑线 |
左循迹传感器没检测到黑线 且中循迹传感器没检测到黑线且右循迹传感器没检测到黑线 |
前进(PWM设为200) |
左循迹传感器检测到黑线 或者中循迹传感器检测到黑线 或者右循迹传感器检测到黑线 |
左循迹传感器检测到黑线 或者中循迹传感器检测到黑线 或者右循迹传感器检测到黑线 |
左循迹传感器检测到黑线 或者中循迹传感器检测到黑线 或者右循迹传感器检测到黑线 |
后退(PWM设为200) 然后左旋转(PWM设为200) |
按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
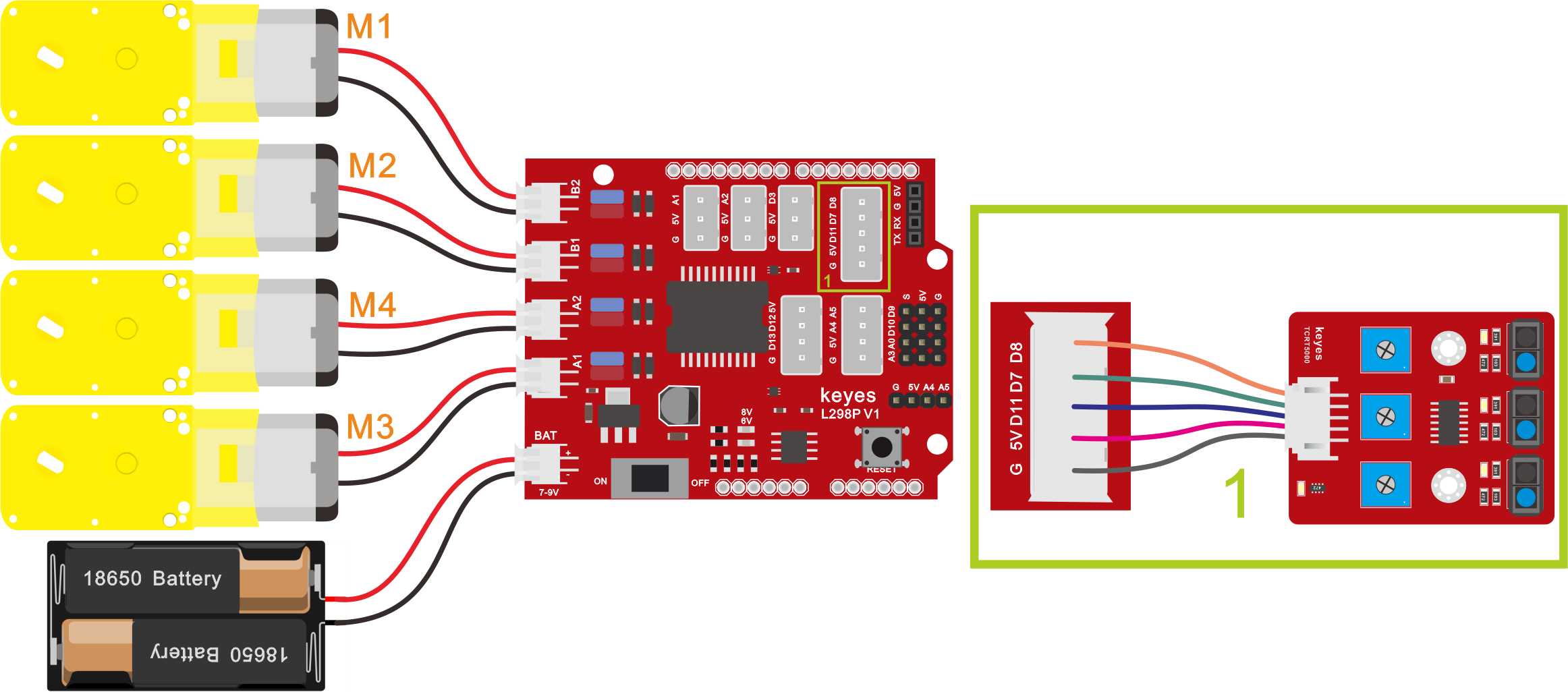
接线图:循迹模块+电机#
测试代码:#
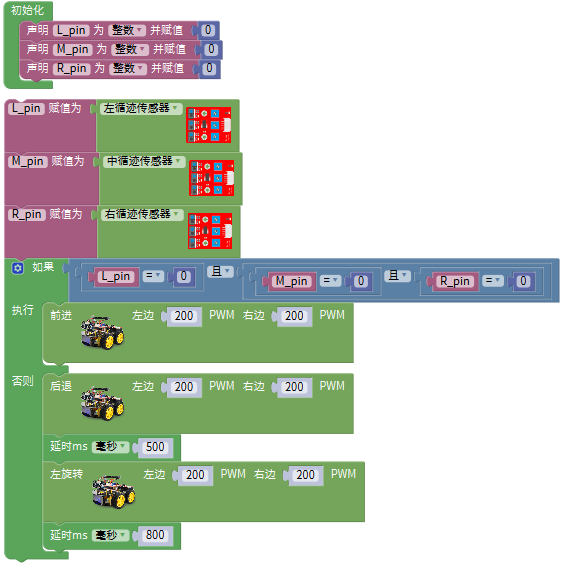
①初始化 |
|
|---|---|
②设置变量L_pin、M_pin、R_pin为整数并赋值为0 |
|
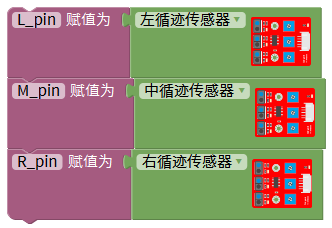
③将三个循迹传感器的值赋值给对应的变量L_pin、M_pin、R_pin中 |
|
④判断L_pin、M_pin、R_pin的值是否等于0 |
|
⑤4WD小车以PWM200的速度前进 |
|
⑥当不满足前面的条件则执行下列代码 |
|
⑦4WD小车以PWM200的速度后退500毫秒 |
|
⑧4WD小车以PWM200的速度左转800毫秒 |
|




(在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。)
完整代码:
测试结果:#
当小车行驶过程中检测到黑线立即后退500毫秒,然后左转800毫秒继续行驶。