第10课 画地为牢智能车#
项目介绍:#
前面我们详细的介绍了智能车上各个传感器、模块、扩展板的使用方法。在这里我们可以结合前面课程中知识制作一个画地为牢智能车。实验中,我们通过循迹传感器检测智能车底部是否存在黑线,然后根据检测结果控制两个电机的转动,从而把智能车关在黑线圈中即画地为牢。
流程图:#
画地为牢智能车具体逻辑如下表格。
检测 |
中循迹传感器 |
检测到黑线:高电平 |
检测到黑线:高电平 |
|---|---|---|---|
检测 |
中循迹传感器 |
检测到白线:低电平 |
检测到白线:低电平 |
检测 |
左循迹传感器 |
检测到黑线:高电平 |
检测到黑线:高电平 |
检测 |
左循迹传感器 |
检测到白线:低电平 |
检测到白线:低电平 |
检测 |
右循迹传感器 |
检测到黑线:高电平 |
检测到黑线:高电平 |
检测 |
右循迹传感器 |
检测到白线:低电平 |
检测到白线:低电平 |
条件 |
条件 |
条件 |
状态 |
左循迹传感器没检测到黑线 且中循迹传感器没检测到黑线且右循迹传感器没检测到黑线 |
左循迹传感器没检测到黑线 且中循迹传感器没检测到黑线且右循迹传感器没检测到黑线 |
左循迹传感器没检测到黑线 且中循迹传感器没检测到黑线且右循迹传感器没检测到黑线 |
前进(PWM设为200) |
左循迹传感器检测到黑线 或者中循迹传感器检测到黑线 或者右循迹传感器检测到黑线 |
左循迹传感器检测到黑线 或者中循迹传感器检测到黑线 或者右循迹传感器检测到黑线 |
左循迹传感器检测到黑线 或者中循迹传感器检测到黑线 或者右循迹传感器检测到黑线 |
后退(PWM设为200) 然后左旋转(PWM设为200) |
按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
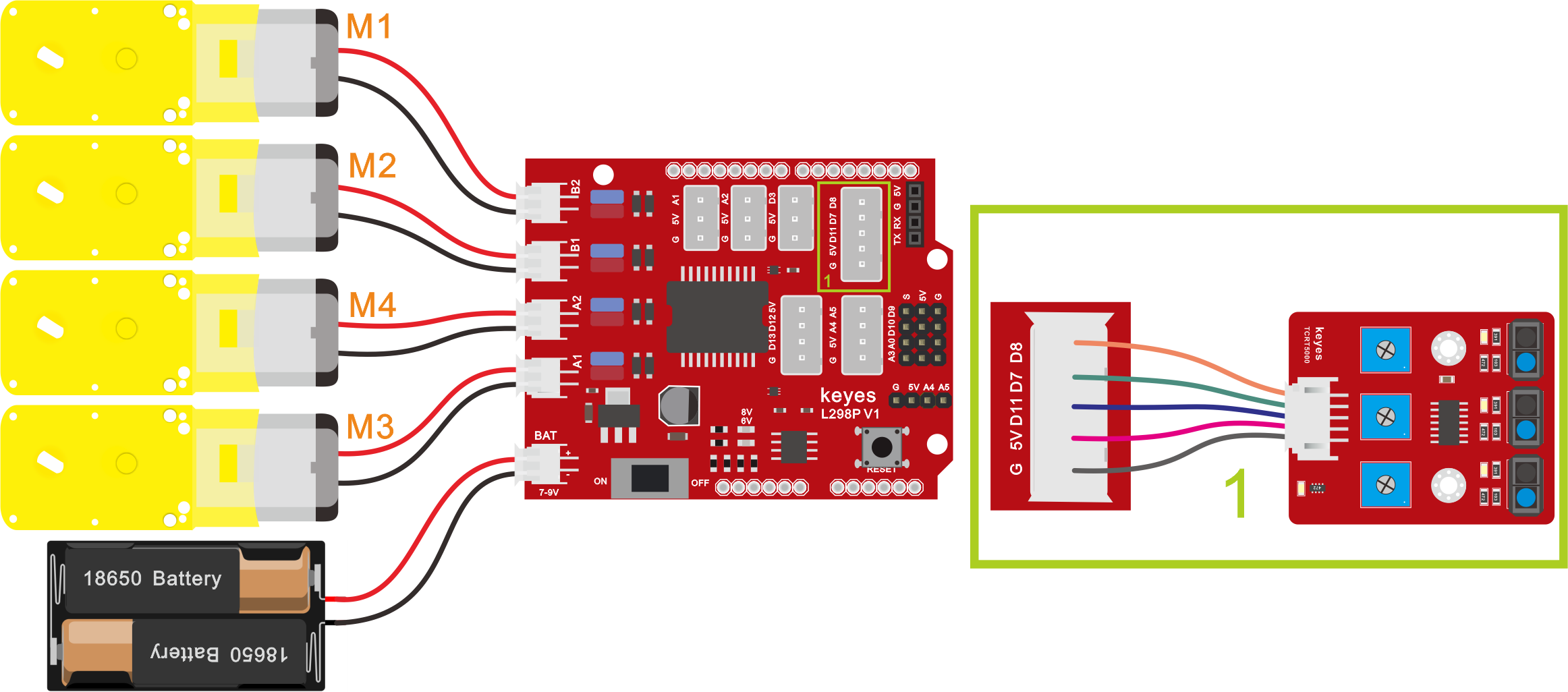
接线图:循迹模块+电机#
测试代码:#
示例代码 1(KE0165_10.ino):
/*
keyes 4WD 多功能智能车
课程 10
线路跟踪机器人
http://www.keyes-robot.com
*/
#define L_PIN 11 // 左边传感器引脚
#define M_PIN 7 // 中间传感器引脚
#define R_PIN 8 // 右边传感器引脚
#define MA 2 // 电机M3,M4方向控制引脚
#define PWMA 6 // 电机M3,M4速度控制引脚
#define MB 4 // 电机M1,M2方向控制引脚
#define PWMB 5 // 电机M1,M2速度控制引脚
int lVal, mVal, rVal;
/* 功能:小车前进 */
void advance() {
digitalWrite(MA, HIGH); // 电机A正转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, HIGH); // 电机B正转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车后退 */
void back() {
digitalWrite(MA, LOW); // 电机A反转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, LOW); // 电机B反转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车左转 */
void turnLeft() {
digitalWrite(MA, HIGH); // 电机A正转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, LOW); // 电机B反转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车右转 */
void turnRight() {
digitalWrite(MA, LOW); // 电机A反转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, HIGH); // 电机B正转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车停止 */
void stopCar() {
analogWrite(PWMA, 0); // 电机A速度为0
analogWrite(PWMB, 0); // 电机B速度为0
}
/* 功能:初始化设置 */
void setup() {
Serial.begin(9600); // 设置波特率为9600
pinMode(L_PIN, INPUT); // 循迹传感器引脚配置为输入模式
pinMode(M_PIN, INPUT); // 循迹传感器引脚配置为输入模式
pinMode(R_PIN, INPUT); // 循迹传感器引脚配置为输入模式
pinMode(MA, OUTPUT); // 电机方向控制引脚配置为输出模式
pinMode(PWMA, OUTPUT); // 电机速度控制引脚配置为输出模式
pinMode(MB, OUTPUT); // 电机方向控制引脚配置为输出模式
pinMode(PWMB, OUTPUT); // 电机速度控制引脚配置为输出模式
}
/* 功能:主循环,读取传感器并控制小车动作 */
void loop() {
lVal = digitalRead(L_PIN); // 读取左边传感器的值
mVal = digitalRead(M_PIN); // 读取中间传感器的值
rVal = digitalRead(R_PIN); // 读取右边传感器的值
if (lVal == 0 && mVal == 0 && rVal == 0) { // 当都没有检测到黑线时前进
advance();
} else { // 任一传感器检测到黑线则后退再左转
back();
delay(500); // 后退延时
turnLeft();
delay(800); // 左转延时
}
}
测试结果:#
当小车行驶过程中检测到黑线立即撤退,然后左转继续行驶。