第14课 红外遥控智能车#
(1)项目介绍:#
前面的学习中我们详细的介绍了智能车上各个传感器、模块、扩展板的使用方法。在这里我们可以再结合前面课程中知识制作一个红外控制智能车。在传感器项目第四课中,我们已经测试出红外遥控器各个按键对应的键值。实验中,我们可以通过代码设置(键值),让对应的按键控制智能车对应的运动状态,且相应的状态模式显示在8X16 LED矩阵上。
(2)流程图:#
循迹智能车具体逻辑如下表格:
按键: |
键值:FF629D |
状态:前进 |
|---|---|---|
按键: |
键值:FFA857 |
状态:后退 |
按键: |
键值:FF22DD |
状态:左转 |
按键: |
键值:FFC23D |
状态:右转 |
按键: |
键值:FF02FD |
状态:停止 |





按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
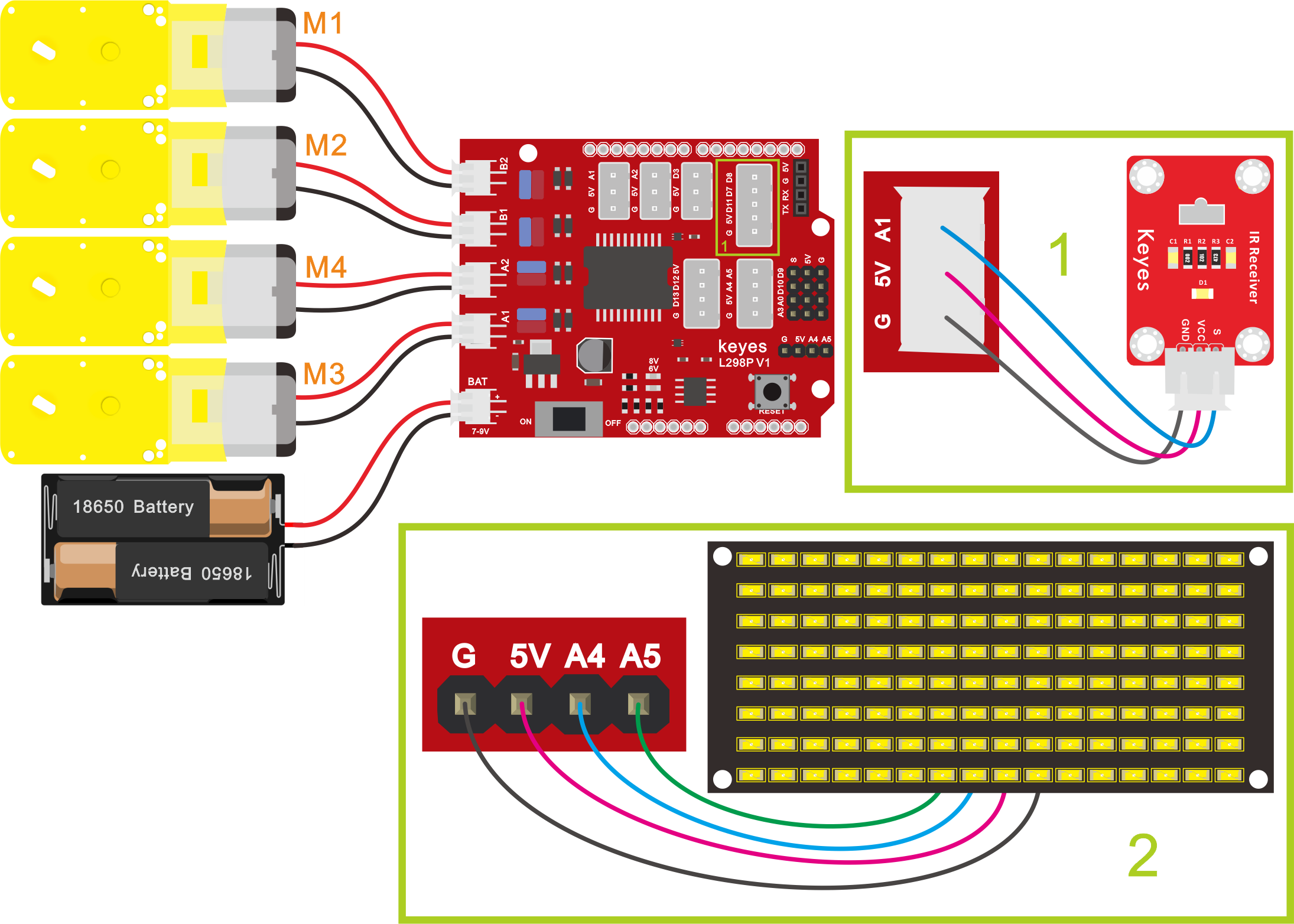
(3)接线图:电机+红外接收模块#
接线注意:由于红外接收传感器输入的数字信号,将红外接收传感器模块用导线连接到电机驱动扩展板上的G、V、A1 ; A、B两组电机分别对应的连接到堆叠在UNO Plus板上的电机驱动扩展板上的接口A和接口B,电源接到BAT接口。
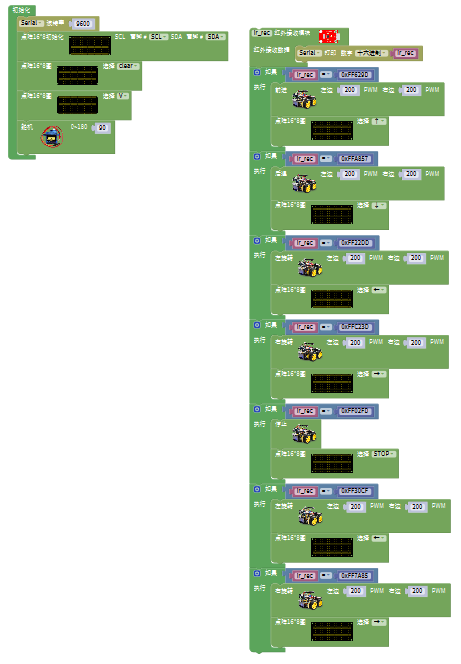
(4)测试代码:#
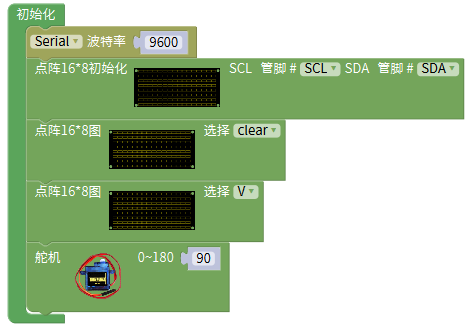
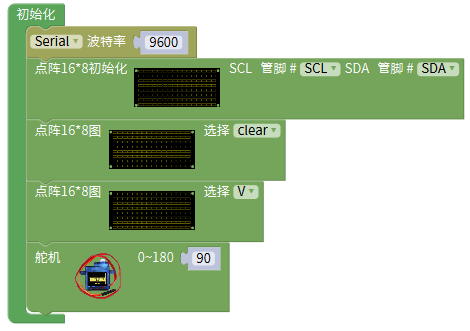
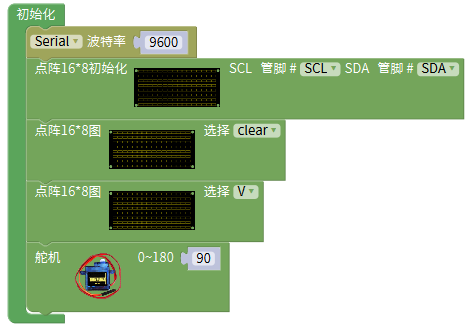
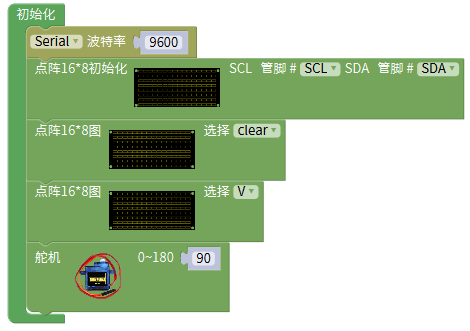
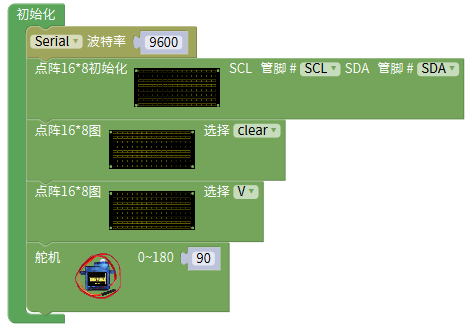
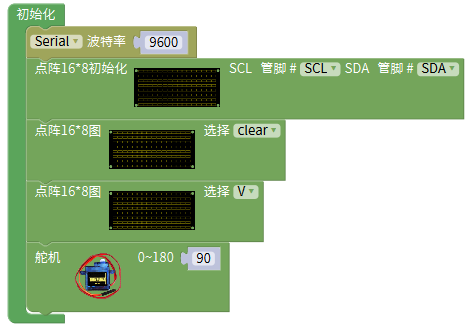
①初始化 |
|
|---|---|
②设置串口波特率为9600 |
|
③设置点阵8x16的时钟(SCL)引脚为SCL,数据(SDA)引脚为SDA; |
|
④点阵8x16清屏 |
|
⑤点阵8x16显示“V”图案 |
|
⑥舵机设置的角度为90 |
|
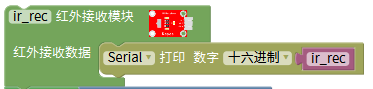
⑥红外接收模块信号端接收红外遥控信号 |
|
⑦当红外遥控信号=0xFF629D成立时, |
|
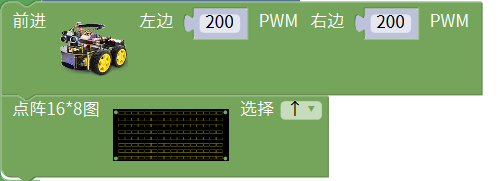
⑧小车以PWM200的速度前进, |
|
⑦当红外遥控信号=0xFFA857成立时, |
|
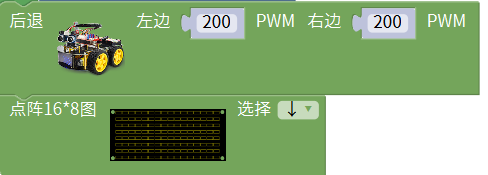
⑧小车以PWM200的速度后退,点阵8x16显示“↓”图案 |
|
⑩当红外遥控信号=0xFF22DD成立时,就执行do中的命令(代码) |
|
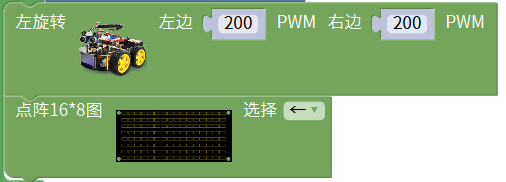
⑪小车左转弯,点阵8x16显示“←”图案 |
|
⑬当红外遥控信号=0xFFC23D成立时,就执行do中的命令(代码) |
|
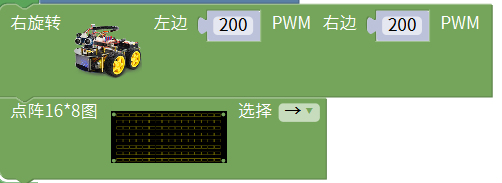
⑭小车右转弯,点阵8x16显示“→”图案 |
|
⑯当红外遥控信号=0xFF02FD成立时,就执行do中的命令(代码) |
|
⑰小车停止,点阵8x16显示“STOP”图案 |
|
⑲当红外遥控信号=0xFF30CF成立时,就执行do中的命令(代码) |
|
⑳小车以PWM200的速度左旋转,点阵8x16显示“←”图案 |
|
㉒当红外遥控信号=0xFF7A85成立时,就执行do中的命令(代码) |
|
㉓小车以PWM200的速度右旋转,点阵8x16显示“→”图案 |
|







(注意:在上传测试代码前,需要把蓝牙模块取下,否则测试代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
(5)测试结果:#
将驱动扩展板堆叠在UNO Plus板上,上传好代码,按照接线图接线,将拨码开关拨至ON端后,我们就能用红外遥控控制智能车运动了。