第14课 红外遥控智能车#
(1)项目介绍:#
前面的学习中我们详细的介绍了智能车上各个传感器、模块、扩展板的使用方法。在这里我们可以再结合前面课程中知识制作一个红外控制智能车。在传感器项目第四课中,我们已经测试出红外遥控器各个按键对应的键值。实验中,我们可以通过代码设置(键值),让对应的按键控制智能车对应的运动状态,且相应的状态模式显示在8X16 LED矩阵上。
(2)流程图:#
循迹智能车具体逻辑如下表格:
按键: |
键值:FF629D |
状态:前进 |
|---|---|---|
按键: |
键值:FFA857 |
状态:后退 |
按键: |
键值:FF22DD |
状态:左转 |
按键: |
键值:FFC23D |
状态:右转 |
按键: |
键值:FF02FD |
状态:停止 |





按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
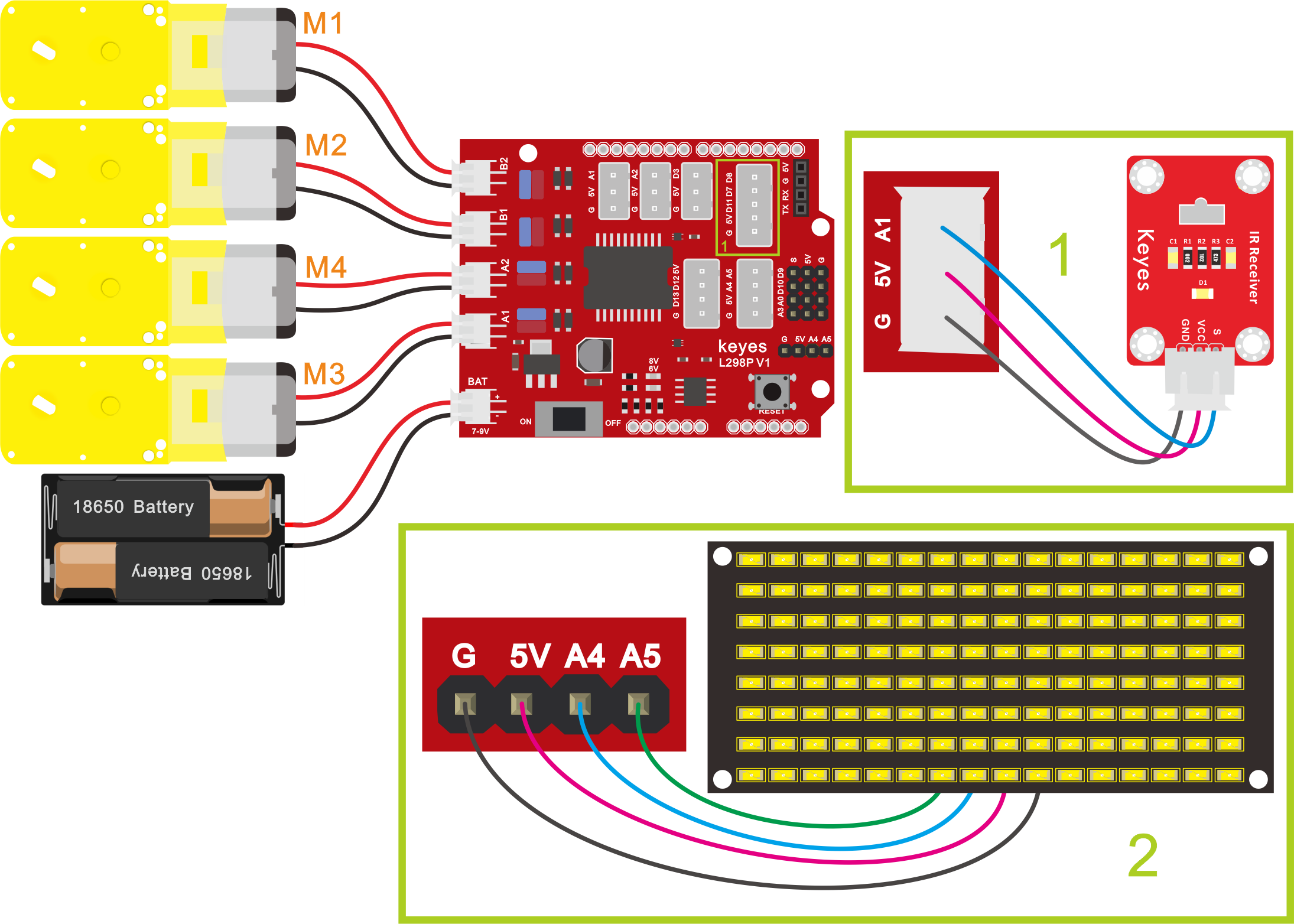
(3)接线图:电机+红外接收模块#
接线注意:由于红外接收传感器输入的数字信号,将红外接收传感器模块用导线连接到电机驱动扩展板上的G、V、A1 ; A、B两组电机分别对应的连接到堆叠在UNO Plus板上的电机驱动扩展板上的接口A和接口B,电源接到BAT接口。
(4)测试代码:#
示例代码 1(KE0165_14.ino):
/*
keyes 4WD 多功能智能车
课程 14
遥控机器人
http://www.keyes-robot.com
*/
#include <IRremote.h>
#define RECV_PIN A1 // 红外接收引脚 A1
#define SCL_PIN A5 // 时钟引脚 A5
#define SDA_PIN A4 // 数据引脚 A4
#define MA 2 // 电机M3,M4方向控制引脚 D2
#define PWMA 6 // 电机M3,M4速度控制引脚 D6
#define MB 4 // 电机M1,M2方向控制引脚 D4
#define PWMB 5 // 电机M1,M2速度控制引脚 D5
IRrecv irrecv(RECV_PIN);
decode_results results; // 声明红外接收结果变量
int irVal;
// 图案数据数组,可自行计算或使用取模工具获得
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back01[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char stop01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
/* 功能:小车前进 */
void advance() {
digitalWrite(MA, HIGH); // 电机A正转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, HIGH); // 电机B正转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车后退 */
void back() {
digitalWrite(MA, LOW); // 电机A反转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, LOW); // 电机B反转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车左转 */
void turnLeft() {
digitalWrite(MA, HIGH); // 电机A正转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, LOW); // 电机B反转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车右转 */
void turnRight() {
digitalWrite(MA, LOW); // 电机A反转
analogWrite(PWMA, 200); // 电机A速度为200
digitalWrite(MB, HIGH); // 电机B正转
analogWrite(PWMB, 200); // 电机B速度为200
}
/* 功能:小车停止 */
void stopCar() {
analogWrite(PWMA, 0); // 电机A速度为0
analogWrite(PWMB, 0); // 电机B速度为0
}
/* 功能:初始化设置 */
void setup() {
Serial.begin(9600); // 设置串口波特率为9600
pinMode(MA, OUTPUT); // 配置电机方向引脚为输出
pinMode(PWMA, OUTPUT); // 配置电机速度引脚为输出
pinMode(MB, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(SCL_PIN, OUTPUT); // 配置I2C时钟引脚为输出
pinMode(SDA_PIN, OUTPUT); // 配置I2C数据引脚为输出
irrecv.enableIRIn(); // 启用红外接收
matrixDisplay(clear); // 点阵屏清屏
matrixDisplay(start01); // 显示启动图案
}
/* 功能:主循环,处理红外遥控信号 */
void loop() {
if (irrecv.decode(&results)) { // 判断是否接收到红外信号
irVal = results.value;
Serial.println(irVal, HEX); // 串口打印接收到的红外码(十六进制)
switch (irVal) {
case 0xFF629D:
advance();
matrixDisplay(front);
break;
case 0xFFA857:
back();
matrixDisplay(back01);
break;
case 0xFF22DD:
turnLeft();
matrixDisplay(left);
break;
case 0xFFC23D:
turnRight();
matrixDisplay(right);
break;
case 0xFF02FD:
stopCar();
matrixDisplay(stop01);
break;
}
irrecv.resume(); // 准备接收下一个红外信号
}
}
/* 功能:点阵屏显示图案 */
void matrixDisplay(unsigned char matrixValue[]) {
IICStart(); // 发送开始条件
IICSend(0xC0); // 选择点阵屏地址
for (int i = 0; i < 16; i++) { // 发送16字节图案数据
IICSend(matrixValue[i]);
}
IICEnd(); // 发送结束条件
IICStart();
IICSend(0x8A); // 显示控制,脉宽4/16
IICEnd();
}
/* 功能:I2C开始信号 */
void IICStart() {
digitalWrite(SCL_PIN, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_PIN, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_PIN, LOW);
delayMicroseconds(3);
}
/* 功能:I2C发送一个字节数据 */
void IICSend(unsigned char sendData) {
for (char i = 0; i < 8; i++) { // 逐位发送8位数据
digitalWrite(SCL_PIN, LOW); // 拉低时钟,准备改变数据线状态
delayMicroseconds(3);
if (sendData & 0x01) { // 判断最低位是1还是0
digitalWrite(SDA_PIN, HIGH);
} else {
digitalWrite(SDA_PIN, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_PIN, HIGH); // 拉高时钟,完成数据传输
delayMicroseconds(3);
sendData = sendData >> 1; // 右移一位,准备发送下一位
}
}
/* 功能:I2C结束信号 */
void IICEnd() {
digitalWrite(SCL_PIN, LOW);
delayMicroseconds(3);
digitalWrite(SDA_PIN, LOW);
delayMicroseconds(3);
digitalWrite(SCL_PIN, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_PIN, HIGH);
delayMicroseconds(3);
}
(5)测试结果:#
将驱动扩展板堆叠在UNO Plus板上,上传好代码,按照接线图接线,将拨码开关拨至ON端后,我们就能用红外遥控控制智能车运动了。