第03课 巡线传感器#
(1)项目介绍:#
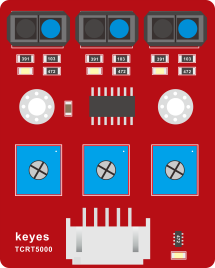
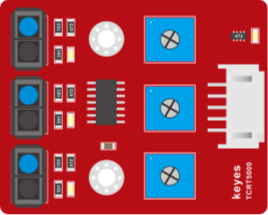
循迹传感器实际上是红外传感器。 此处使用的组件是TCRT5000红外管。
其工作原理是利用红外光对颜色的不同反射率,然后将反射信号的强度转换为电流信号。
在检测过程中,黑色在高电平时处于活动状态,而白色在低电平时处于活动状态。 检测高度为0-3厘米。
KEYES三路循迹模块在一块板上集成了三个TCRT5000红外管,接线和控制更加方便。
通过旋转传感器上的可调电位器,可以调节传感器的检测灵敏度。
(2)参数:#
工作电压:3.3-5V(DC)
接口:5PIN
输出信号:数字信号
检测高度:0-3厘米
特别说明:在测试之前,请旋转传感器上的电位器以调整检测灵敏度。 当将LED调整在ON和OFF之间的阈值时,灵敏度是最好的。

(3)项目组件:#
Keyes Uno Plus 开发板 红色环保*1 |
Keyes brick L298P 电机驱动扩展板 V1*1 |
keyes 草帽LED白发红模块*1 |
Keyes connectors 循迹传感器*1 |
|---|---|---|---|
|
|
|
|
XH2.54转PH2.0 5P 连接线*1 |
3Pin 双母头杜邦线*1 |
USB线*1 |
18650双节电池盒*1 |
|
|
|
|


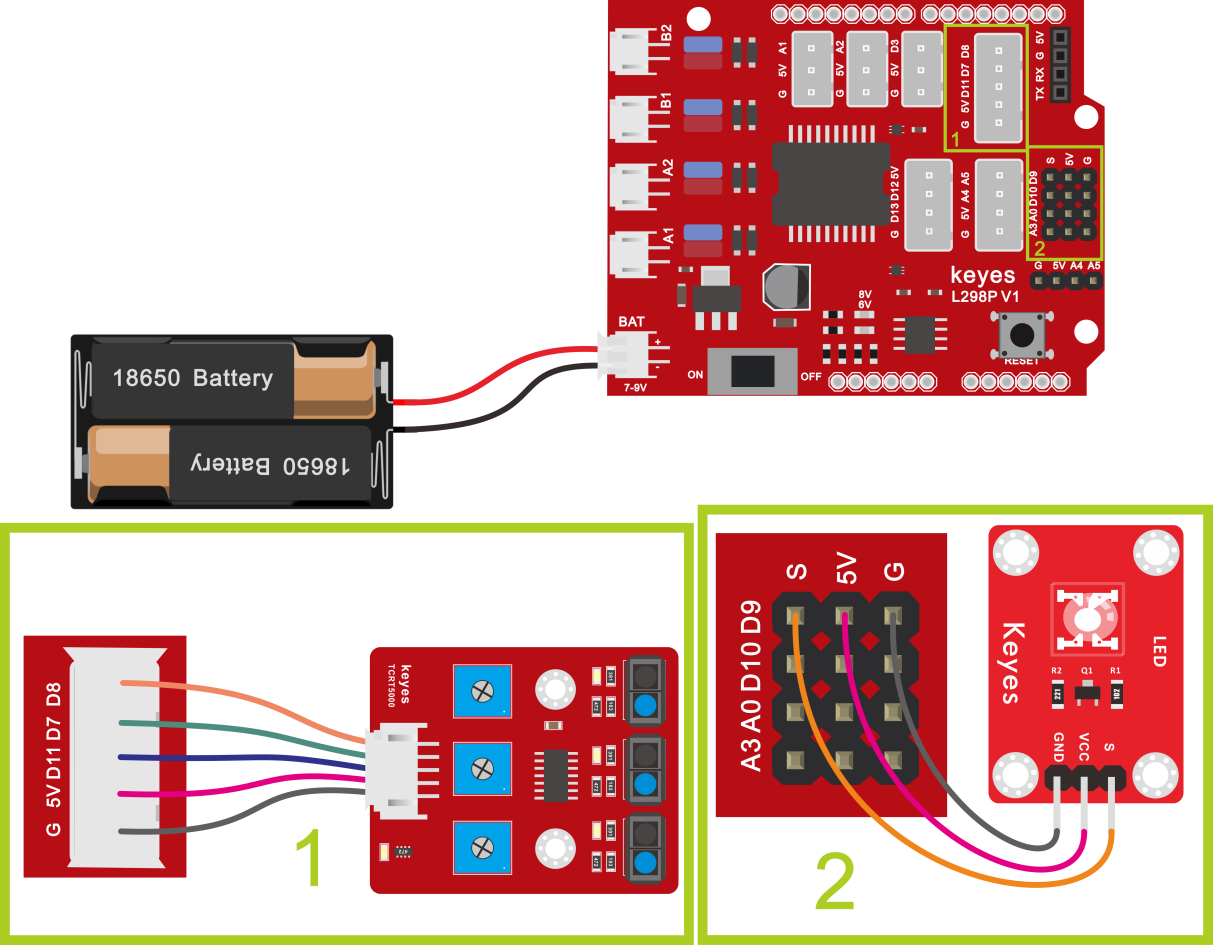
(4)接线图:#
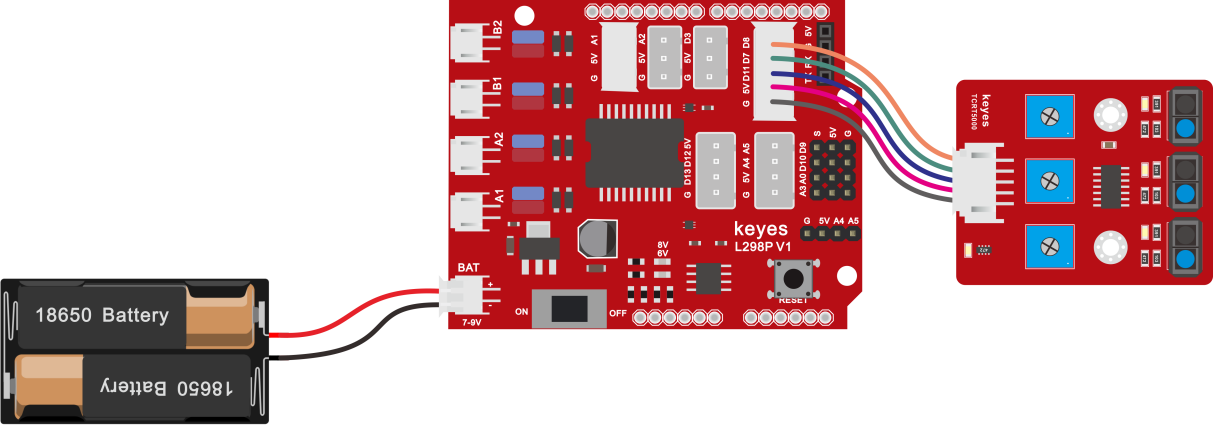
循迹传感器接扩展板的D11、D7、D8引脚(左11,中7,右8)。
(5)项目代码:#
也可以自己通过拖动代码块来编写代码程序,操作步骤如下:
点击“变量”模块,找到并拖出方块,再点击“数学”模块,拖出

然后将item变量名修改为L_val、M_val、R_val,变量类型下拉选择“int”:。
(2)点击“串口”模块,找到  并拖出指令方块放入
并拖出指令方块放入  方块中。
方块中。
点击“变量”模块,找到并拖出指令方块  、
、 和
和 ,在点击“Keyes智能小车”里面的“4WD智能小车”选择
,在点击“Keyes智能小车”里面的“4WD智能小车”选择 ,复制两次,再分别点击下拉三角形按钮选择“中循迹传感器”和“有循迹传感器”,然后放入对应的变量中:
,复制两次,再分别点击下拉三角形按钮选择“中循迹传感器”和“有循迹传感器”,然后放入对应的变量中:
(4)再点击“串口”模块,找到 并拖出指令方块。
并拖出指令方块。
(5)点击“变量”模块,找到并拖出指令方块  、
、  和
和 放入指令方块
放入指令方块  中,再在“文本”模块中找到
中,再在“文本”模块中找到 ,将“hello”改为“ ”(两个空格),
,将“hello”改为“ ”(两个空格), 是用于换行打印。
是用于换行打印。

(6)点击“Control”模块,找到并拖出方块,延时时间1000毫秒改成100毫秒。

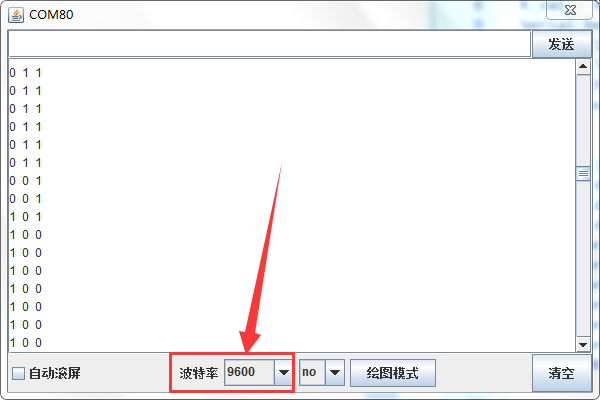
(6)项目结果:#
上传代码带开发板,打开串口监视,可以看到左中右三个循迹传感器的状态,如果我们用白纸去遮挡传感器,传感器的状态都是0。在没有接收到信号的时候,三个传感器都是高电平状态,显示的数值是1。
(7)项目拓展:#
上面我们了解了循迹传感器的工作原理,接下来我们在第9脚接上一个LED 灯,然后通过读取循迹传感器的状态,来控制LED的亮和灭。如下图接线:
我们开始来编写代码:
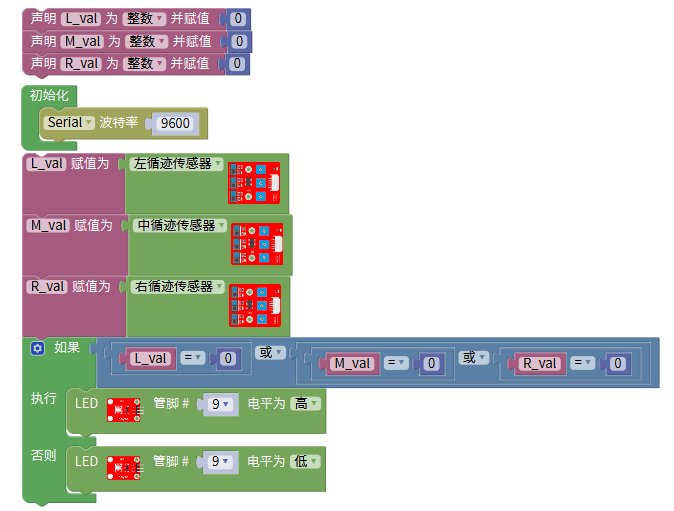
上传代码到开发板,用我们的手去一个个的靠近传感器,我们看看LED灯的状态发生了改变没有?当我们用手去遮挡循迹传感器的时候,我们可以看到LED灯亮起来了。