第16课 蓝牙调速智能车#
项目介绍:#
前面课程中,我们利用蓝牙控制智能车,在这课程中我们做一个蓝牙可以控制速度的智能车。既然要控制智能车速度,我们可以将速度定义一个变量speeds来表示。项目中我们只要改变这是变量speeds就可以改变智能车的速度啦。下面让我们通过代码来实现。
流程图:#
按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
接线图:蓝牙+电机#
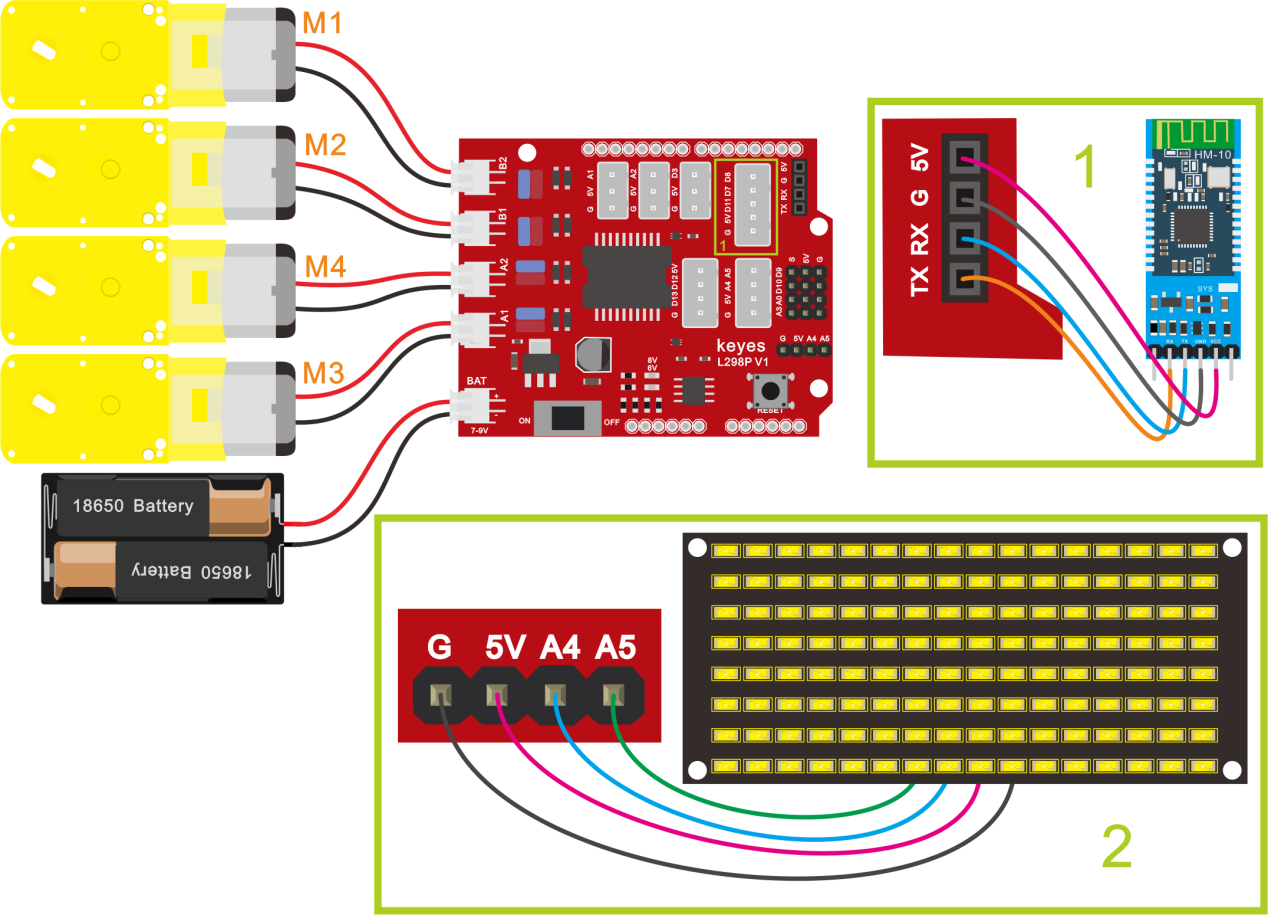
接线跟上一课一样
测试代码:#
示例代码 1(KE0165_16.ino):
/*
keyes 4WD 多功能智能车
课程16
蓝牙控制速度
http://www.keyes-robot.com
*/
// 数组,用于存储图案的数据,可以自己计算也可以从取模工具中获得
unsigned char START_01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char FRONT[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char BACK_01[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char LEFT[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char RIGHT[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP_01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char SPEED_A[] = {0x00, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0xff, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x00, 0x00};
unsigned char SPEED_D[] = {0x00, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0xff, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x00, 0x00};
unsigned char CLEAR[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_PIN A5 // 设置时钟引脚为 A5
#define SDA_PIN A4 // 设置数据引脚为 A4
#define MA_PIN 2 // 电机M3,M4方向控制引脚为D2
#define PWMA_PIN 6 // 电机M3,M4速度控制引脚为D6
#define MB_PIN 4 // 电机M1,M2方向控制引脚为D4
#define PWMB_PIN 5 // 电机M1,M2速度控制引脚为D5
int speeds = 150; // 初始化速度为150
char blueVal;
/* 功能:初始化设置 */
void setup() {
Serial.begin(9600); // 设置波特率为9600
pinMode(MA_PIN, OUTPUT); // 配置电机引脚为输出模式
pinMode(PWMA_PIN, OUTPUT);
pinMode(MB_PIN, OUTPUT);
pinMode(PWMB_PIN, OUTPUT);
pinMode(SCL_PIN, OUTPUT); // 设置IIC时钟引脚为输出
pinMode(SDA_PIN, OUTPUT); // 设置IIC数据引脚为输出
matrixDisplay(CLEAR); // 清屏
matrixDisplay(START_01); // 显示启动图案
}
/* 功能:主循环,接收蓝牙指令并执行 */
void loop() {
if (Serial.available() > 0) { // 接收到蓝牙信号
blueVal = Serial.read(); // 读取蓝牙信号
Serial.println(blueVal); // 串口监视器显示蓝牙信号
switch (blueVal) {
case 'F':
advance();
matrixDisplay(FRONT);
break; // 前进
case 'B':
back();
matrixDisplay(BACK_01);
break; // 后退
case 'L':
turnLeft();
matrixDisplay(LEFT);
break; // 左旋转
case 'R':
turnRight();
matrixDisplay(RIGHT);
break; // 右旋转
case 'S':
stopCar();
matrixDisplay(STOP_01);
break; // 停止
case 'a':
speedUp();
matrixDisplay(SPEED_A);
break; // 加速
case 'd':
speedDown();
matrixDisplay(SPEED_D);
break; // 减速
}
}
}
/* 功能:小车前进 */
void advance() {
digitalWrite(MA_PIN, HIGH); // 电机A正转
analogWrite(PWMA_PIN, speeds); // 电机A速度为speeds
digitalWrite(MB_PIN, HIGH); // 电机B正转
analogWrite(PWMB_PIN, speeds); // 电机B速度为speeds
}
/* 功能:小车后退 */
void back() {
digitalWrite(MA_PIN, LOW); // 电机A反转
analogWrite(PWMA_PIN, speeds); // 电机A速度为speeds
digitalWrite(MB_PIN, LOW); // 电机B反转
analogWrite(PWMB_PIN, speeds); // 电机B速度为speeds
}
/* 功能:小车左旋转 */
void turnLeft() {
digitalWrite(MA_PIN, HIGH); // 电机A正转
analogWrite(PWMA_PIN, speeds); // 电机A速度为speeds
digitalWrite(MB_PIN, LOW); // 电机B反转
analogWrite(PWMB_PIN, speeds); // 电机B速度为speeds
}
/* 功能:小车右旋转 */
void turnRight() {
digitalWrite(MA_PIN, LOW); // 电机A反转
analogWrite(PWMA_PIN, speeds); // 电机A速度为speeds
digitalWrite(MB_PIN, HIGH); // 电机B正转
analogWrite(PWMB_PIN, speeds); // 电机B速度为speeds
}
/* 功能:小车停止 */
void stopCar() {
analogWrite(PWMA_PIN, 0); // 电机A速度为0
analogWrite(PWMB_PIN, 0); // 电机B速度为0
}
/* 功能:加速函数 */
void speedUp() {
while (1) {
Serial.println(speeds); // 显示当前速度
if (speeds < 255) { // 最大速度255
speeds++;
delay(10); // 调节加速速度
}
if (Serial.available() > 0) {
blueVal = Serial.read();
if (blueVal == 'S') break; // 接收到‘S’停止加速
}
}
}
/* 功能:减速函数 */
void speedDown() {
while (1) {
Serial.println(speeds); // 显示当前速度
if (speeds > 0) { // 最小速度0
speeds--;
delay(10); // 调节减速速度
}
if (Serial.available() > 0) {
blueVal = Serial.read();
if (blueVal == 'S') break; // 接收到‘S’停止减速
}
}
}
/* 功能:点阵屏显示 */
void matrixDisplay(unsigned char matrixValue[]) {
IICStart(); // 调用数据传输开始条件函数
IICSend(0xc0); // 选择地址
for (int i = 0; i < 16; i++) { // 图案数据16个字节
IICSend(matrixValue[i]); // 传输图案数据
}
IICEnd(); // 结束数据传输
IICStart();
IICSend(0x8A); // 显示控制,选择脉宽为4/16
IICEnd();
}
/* 功能:IIC传输开始条件 */
void IICStart() {
digitalWrite(SCL_PIN, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_PIN, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_PIN, LOW);
delayMicroseconds(3);
}
/* 功能:IIC传输数据 */
void IICSend(unsigned char sendData) {
for (char i = 0; i < 8; i++) { // 每个字节8位
digitalWrite(SCL_PIN, LOW); // 时钟拉低,准备改变数据线信号
delayMicroseconds(3);
if (sendData & 0x01) { // 判断最低位是1还是0
digitalWrite(SDA_PIN, HIGH);
} else {
digitalWrite(SDA_PIN, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_PIN, HIGH); // 时钟拉高,完成数据传输
delayMicroseconds(3);
sendData = sendData >> 1; // 右移一位,准备传输下一位
}
}
/* 功能:IIC传输结束条件 */
void IICEnd() {
digitalWrite(SCL_PIN, LOW);
delayMicroseconds(3);
digitalWrite(SDA_PIN, LOW);
delayMicroseconds(3);
digitalWrite(SCL_PIN, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_PIN, HIGH);
delayMicroseconds(3);
}
测试结果:#
按下  按钮,小车加速;按下
按钮,小车加速;按下  按钮,小车减速.
按钮,小车减速.