第17课 多功能智能小车#
(1)项目介绍:#
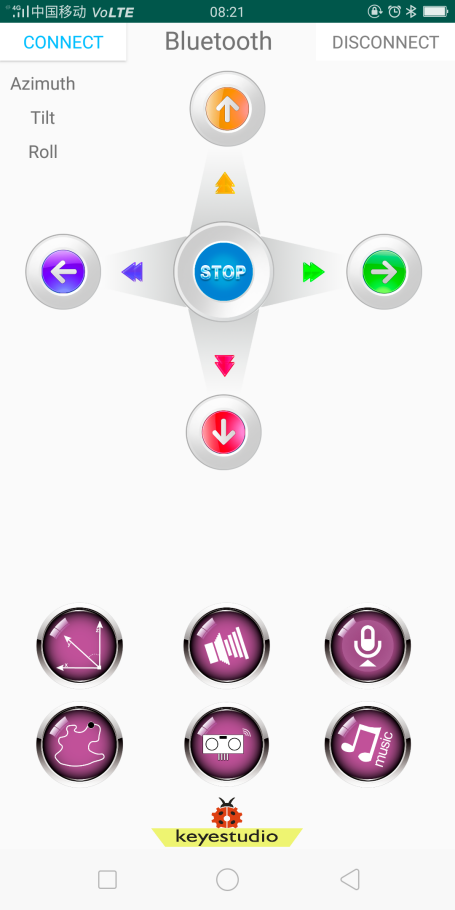
在前面课程中,我们只是让智能车实现单个功能,那我们能不能把所有功能合在一起呢?能,在这一课程中,我们利用一个代码测试智能车,智能车包含前面课程中讲到的所有功能,我们利用手机蓝牙APP上按钮自动切换各种功能,简单方便。
(2)流程图:#
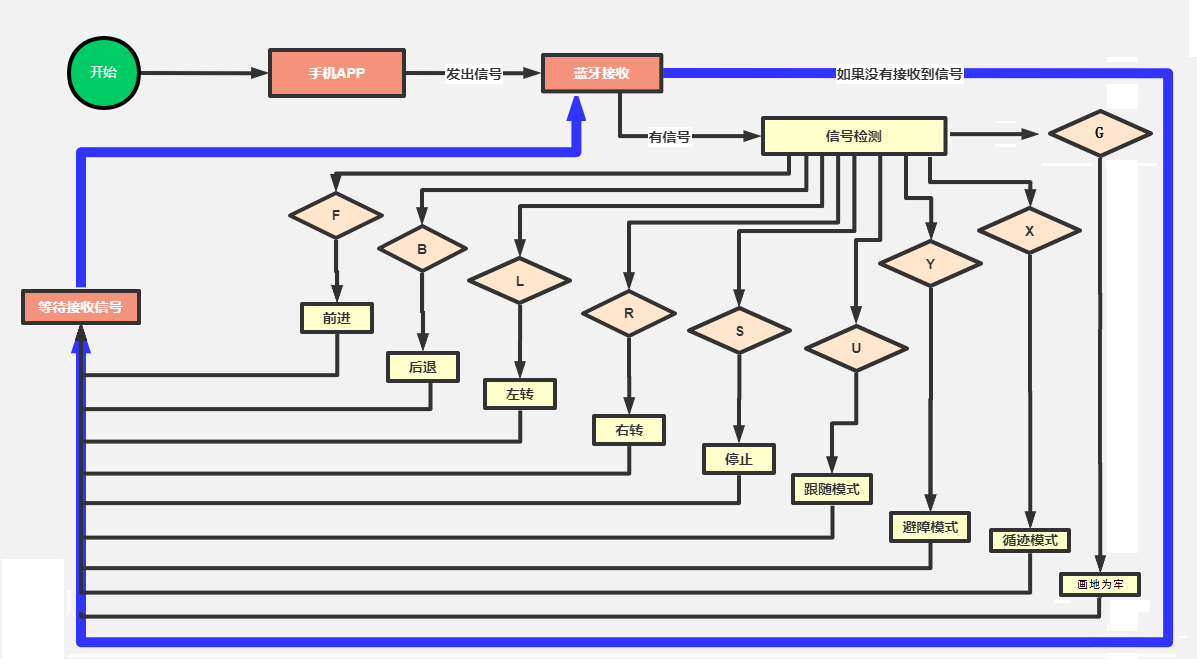
按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
(3)接线图:#
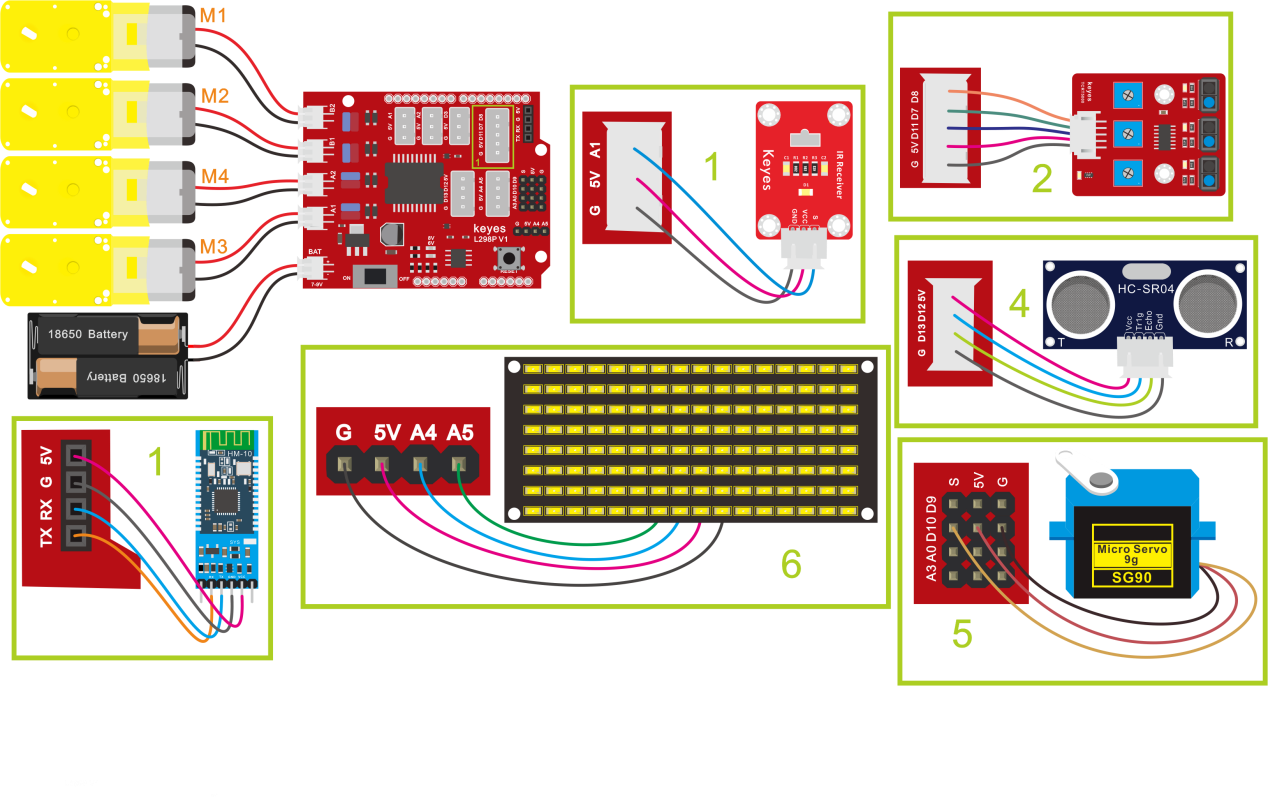
接线注意:
循迹模块连接到电机驱动扩展板上P1接口的G、V、D11、D7、D8;
超声波传感器模块的VCC引脚连接至连接到电机驱动扩展板上,V引脚至V,T(Trig)引脚至数字12(S),E(Echo)引脚至数字13(S),G引脚至G;
红外接收传感器模块用导线连接到电机驱动扩展板上的G、V、A1;(M1、M2),(M3、M4)两组电机分别对应的连接到电机驱动扩展板上的接口B和接口A;
舵机接数字口10;
LED点阵屏接A4、A5管脚(不一定要接IIC引脚);
蓝牙模块的RXD、TXD、GND、VCC分别对应的接到电机驱动扩展板上的TX、RX、-(GND)、+(VCC),而蓝牙模块的STATE和BRK两引脚不需要接,电源接到BAT接口。
(4)测试代码:#
示例代码 1(KE0165_17.ino):
/*
keyes 4WD Multifunctional Smart Car
lesson 17
Bluetooth control multifunctional 4WD robot
http://www.keyes-robot.com
*/
#include <IRremote.h> //导入红外的库
int RECV_PIN = A1; //定义IO口A1
IRrecv irrecv(RECV_PIN);
decode_results results;//声明一个IRremote库函数独有的变量类型
#include <Servo.h>
Servo myservo; // create servo object to control a servo
//数组,用于储存图案的数据,可以自己算也可以从取摸工具中得到
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back01[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char speed_a[] = {0x00, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0xff, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x00, 0x00};
unsigned char speed_d[] = {0x00, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0xff, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x00, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_Pin A5 //设置时钟引脚为 A5
#define SDA_Pin A4 //设置数据引脚为 A4
int IR_val;
char blue_val;
int L_pin = 11; //定义左边传感器引脚为D11
int M_pin = 7; //定义中间传感器引脚为D7
int R_pin = 8; //定义右边传感器引脚为D8
int L_val, M_val, R_val;
int MA = 2; //定义电机A方向控制引脚为D2
int PWMA = 6; //定义电机A速度控制引脚为D6
int MB = 4; //定义电机A方向控制引脚为D4
int PWMB = 5; //定义电机A速度控制引脚为D5
int speeds = 150; //初始化速度为150
int trigPin = 12; //TRIG引脚接D12
int echoPin = 13; //ECHO引脚接D13
int distance, distance_l, distance_r;
void setup() {
Serial.begin(9600); //设置波特率为9600
myservo.attach(10); // attaches the servo on pin 10 to the servo object
myservo.write(90); //舵机角度为90
delay(500);
pinMode(L_pin, INPUT); //循迹传感器引脚都配置为输入模式
pinMode(M_pin, INPUT);
pinMode(R_pin, INPUT);
//设置引脚为输出
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
pinMode(trigPin, OUTPUT); //定义TRIG为输出模式
pinMode(echoPin, INPUT); //定义ECHO为输入模式
pinMode(MA, OUTPUT); //配置电机引脚为输出模式
pinMode(PWMA, OUTPUT);
pinMode(MB, OUTPUT);
pinMode(PWMB, OUTPUT);
irrecv.enableIRIn();// 使能红外接收
//清屏
matrix_display(clear);
matrix_display(start01);
}
void loop() {
if (Serial.available() > 0) { //接收到蓝牙信号
blue_val = Serial.read(); //接收到的信号赋给blue_val
Serial.println(blue_val); //串口监视器显示蓝牙信号
switch (blue_val) {
case 'F': advance(); matrix_display(front); break; //接收到‘F’前进
case 'B': back(); matrix_display(back01); break; //接收到‘B’后退
case 'L': turnL(); matrix_display(left); break; //接收到‘L’左旋
case 'R': turnR(); matrix_display(right); break; //接收到‘R’右旋
case 'S': stopp(); matrix_display(STOP01); break; //接收到‘S’电机停止转动,功放停止
case 'a': speeds_a(); matrix_display(speed_a); break; //接收到‘a’加速
case 'd': speeds_d(); matrix_display(speed_d); break; //接收到‘d’减速
case 'U': follow(); break; //接收到‘U’,进入跟随模式
case 'Y': avoid(); break; //接收到‘Y’,进入避障模式
case 'G': prison(); break; //接收到‘G’,画地为牢模式
case 'X': track(); break; //接收到‘X’,巡黑线模式
}
}
if (irrecv.decode(&results)) { //是否接收到红外遥控信号
IR_val = results.value;
Serial.println(IR_val, HEX); //串口打印数据
switch (IR_val) {
case 0xFF629D: advance(); matrix_display(front); break; //前进
case 0xFFA857: back(); matrix_display(back01); break; //后退
case 0xFF22DD: turnL(); matrix_display(left); break; //左转
case 0xFFC23D: turnR(); matrix_display(right); break; //右转
case 0xFF02FD: stopp(); matrix_display(STOP01); break; //停止
}
irrecv.resume();// 接收下个数据
}
}
void advance() { //小车前进
digitalWrite(MA, LOW); //电机A正转
analogWrite(PWMA, speeds); //电机A速度为speeds
digitalWrite(MB, HIGH); //电机B正转
analogWrite(PWMB, speeds); //电机B速度为speeds
}
void back() { //小车后退
digitalWrite(MA, HIGH); //电机A反转
analogWrite(PWMA, speeds); //电机A速度为speeds
digitalWrite(MB, LOW); //电机B反转
analogWrite(PWMB, speeds); //电机B速度为speeds
}
void turnL() { //小车左旋转
digitalWrite(MA, HIGH); //电机A反转
analogWrite(PWMA, speeds); //电机A速度为speeds
digitalWrite(MB, HIGH); //电机B正转
analogWrite(PWMB, speeds); //电机B速度为speeds
}
void turnR() { //小车右旋转
digitalWrite(MA, LOW); //电机A正转
analogWrite(PWMA, speeds); //电机A速度为speeds
digitalWrite(MB, LOW); //电机B反转
analogWrite(PWMB, speeds); //电机B速度为speeds
}
void stopp() { //小车停止
analogWrite(PWMA, 0); //电机A速度为0
analogWrite(PWMB, 0); //电机B速度为0
}
void speeds_a() { //增速函数
while (1) {
Serial.println(speeds); //显示速度
if (speeds < 255) { //最大增到255
speeds++;
delay(10); //调节增速的速度
}
blue_val = Serial.read();
if (blue_val == 'S')break; //接收到‘S’停止加速
}
}
void speeds_d() { //减速函数
while (1) {
Serial.println(speeds); //显示速度
if (speeds > 0) { //最小减到0
speeds--;
delay(10); //调节减速的速度
}
blue_val = Serial.read();
if (blue_val == 'S')break; //接收到‘S’停止减速
}
}
int get_distance() {
int distance = 0;
digitalWrite(trigPin, LOW); // 通过Trig/Pin 发送脉冲,触发 HC-SR04 测距,使发出发出超声波信号接口低电平2μs
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // 使发出发出超声波信号接口高电平10μs,这里是至少10μs
delayMicroseconds(10);
digitalWrite(trigPin, LOW); // 保持发出超声波信号接口低电平
distance = pulseIn(echoPin, HIGH) / 58; // 读出脉冲时间,将脉冲时间转化为距离(单位:厘米)
Serial.println(distance); //输出距离值
return distance;
}
void follow() {
int follow_flag = 1;
while (follow_flag) {
distance = get_distance(); //调用测距函数
if (distance < 8 ) {//如果距离小于8
back();//后退
}
else if (distance >= 8 && distance < 13) { //如果距离大于等于8,小于13
stopp();//停止
}
else if (distance >= 13 && distance <= 35 ) { //如果距离大于等于13,小于35
advance();//跟随
}
else {//如果以上都不是
stopp();//停止
}
blue_val = Serial.read();
if (blue_val == 'S') { //接收到‘S’退出循环,小车停止
follow_flag = 0;
stopp();
}
}
}
void avoid() {
int avoid_flag = 1;
while (avoid_flag) {
distance = get_distance(); //调用测距函数
if (distance > 0 && distance < 20) { //如果距离小于20且大于0
stopp();//停止
matrix_display(STOP01); //点阵显示停止图案
delay(100);
myservo.write(180); //舵机转到180度
delay(500);
distance_l = get_distance(); //获取左边的距离
delay(100);
myservo.write(0); //舵机转到0度
delay(500);
distance_r = get_distance(); //获取右边的距离
delay(100);
if (distance_l > distance_r) { //比较距离,如果左边大于右边
turnL(); //向左转
matrix_display(left); //点阵显示向左图案
delay(1000);
myservo.write(90);//舵机回到90度
matrix_display(front); //点阵显示前进图案
}
else { //否则如果右边大于左边
turnR();//向右转
matrix_display(right); //显示右转图案
delay(1000);
myservo.write(90);//舵机回到90度
matrix_display(front); //显示前进图案
}
}
else { //前方距离小于等于10cm时
advance();//前进
matrix_display(front); //显示前进图案
}
blue_val = Serial.read();
if (blue_val == 'S') { //接收到‘S’退出循环,小车停止
avoid_flag = 0;
stopp();
}
}
}
void prison() {
int prison_flag = 1;
while (prison_flag) {
L_val = digitalRead(L_pin); //读取左边传感器的值
M_val = digitalRead(M_pin); //读中间传感器的值
R_val = digitalRead(R_pin); //读取右边传感器的值
if ( L_val == 0 && M_val == 0 && R_val == 0 ) { //当没有检测到黑线时前进
advance();
}
else { //否则任一巡线传感器检测到黑线就后退再左转
back();
delay(500);
turnL();
delay(800);
}
blue_val = Serial.read();
if (blue_val == 'S') { //接收到‘S’退出循环,小车停止
prison_flag = 0;
stopp();
}
}
}
void track() {
int track_flag = 1;
while (track_flag) {
L_val = digitalRead(L_pin); //读取左边传感器的值
M_val = digitalRead(M_pin); //读中间传感器的值
R_val = digitalRead(R_pin); //读取右边传感器的值
if (M_val == 1) { //中间检测到黑线
if (L_val == 1 && R_val == 0) { //如果左边检测到黑线,右边没有,左转
turnL();
}
else if (L_val == 0 && R_val == 1) { //否则如果右边检测到黑线,左边没有,右转
turnR();
}
else { //否则前进
advance();
}
}
else { //中间没检测到黑线
if (L_val == 1 && R_val == 0) { //如果左边检测到黑线,右边没有,左转
turnL();
}
else if (L_val == 0 && R_val == 1) { //否则如果右边检测到黑线,左边没有,右转
turnR();
}
else { //否则停止
stopp();
}
}
blue_val = Serial.read();
if (blue_val == 'S') { //接收到‘S’退出循环,小车停止
track_flag = 0;
stopp();
}
}
}
//这个函数用于点阵屏显示
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //调用数据传输开始条件的函数
IIC_send(0xc0); //选择地址
for (int i = 0; i < 16; i++) //图案数据有16个字节
{
IIC_send(matrix_value[i]); //传输图案的数据
}
IIC_end(); //结束图案数据传输
IIC_start();
IIC_send(0x8A); //显示控制,选择脉宽为4/16
IIC_end();
}
//传输数据开始的条件
void IIC_start()
{
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
}
//传输数据
void IIC_send(unsigned char send_data)
{
for (char i = 0; i < 8; i++) //每个字节有8位
{
digitalWrite(SCL_Pin, LOW); //将时钟引脚SCL_Pin拉低,才可以改变SDA的信号
delayMicroseconds(3);
if (send_data & 0x01) //根据字节的每一位是1还是0来设置SDA_Pin的高低电平
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //将时钟引脚SCL_Pin拉高,停止数据的传输
delayMicroseconds(3);
send_data = send_data >> 1; //一位一位的检测,所以将数据右移一位
}
}
//数据传输结束的标志
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
(5)测试结果:#
将驱动扩展板堆叠在UNO Plus板上,上传好代码,按照接线图接线,将拨码开关拨至ON端后,手机APP连接蓝牙成功后,我们就能用手机APP控制智能车运动了。我们可以通过按下对应按钮实现对应功能,通过停止钮来停止功能。
注意:利用安卓系统手机APP点击,测试语音控制时,不能实现语音控制功能。