第03课 巡线传感器#
(1)项目介绍:#
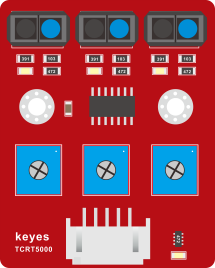
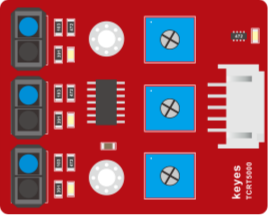
循迹传感器实际上是红外传感器。 此处使用的组件是TCRT5000红外管。
其工作原理是利用红外光对颜色的不同反射率,然后将反射信号的强度转换为电流信号。
在检测过程中,黑色在高电平时处于活动状态,而白色在低电平时处于活动状态。 检测高度为0-3厘米。
KEYES三路循迹模块在一块板上集成了三个TCRT5000红外管,接线和控制更加方便。
通过旋转传感器上的可调电位器,可以调节传感器的检测灵敏度。
(2)参数:#
工作电压:3.3-5V(DC)
接口:5PIN
输出信号:数字信号
检测高度:0-3厘米
特别说明:在测试之前,请旋转传感器上的电位器以调整检测灵敏度。 当将LED调整在ON和OFF之间的阈值时,灵敏度是最好的。

(3) 项目组件:#
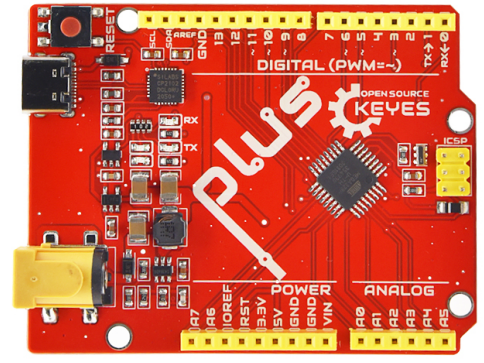
Keyes Uno Plus 开发板 红色环保*1 |
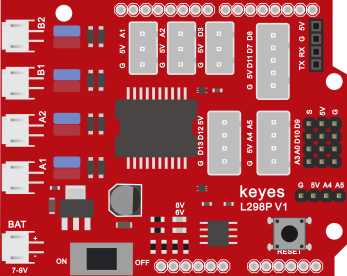
Keyes brick L298P 电机驱动扩展板 V1*1 |
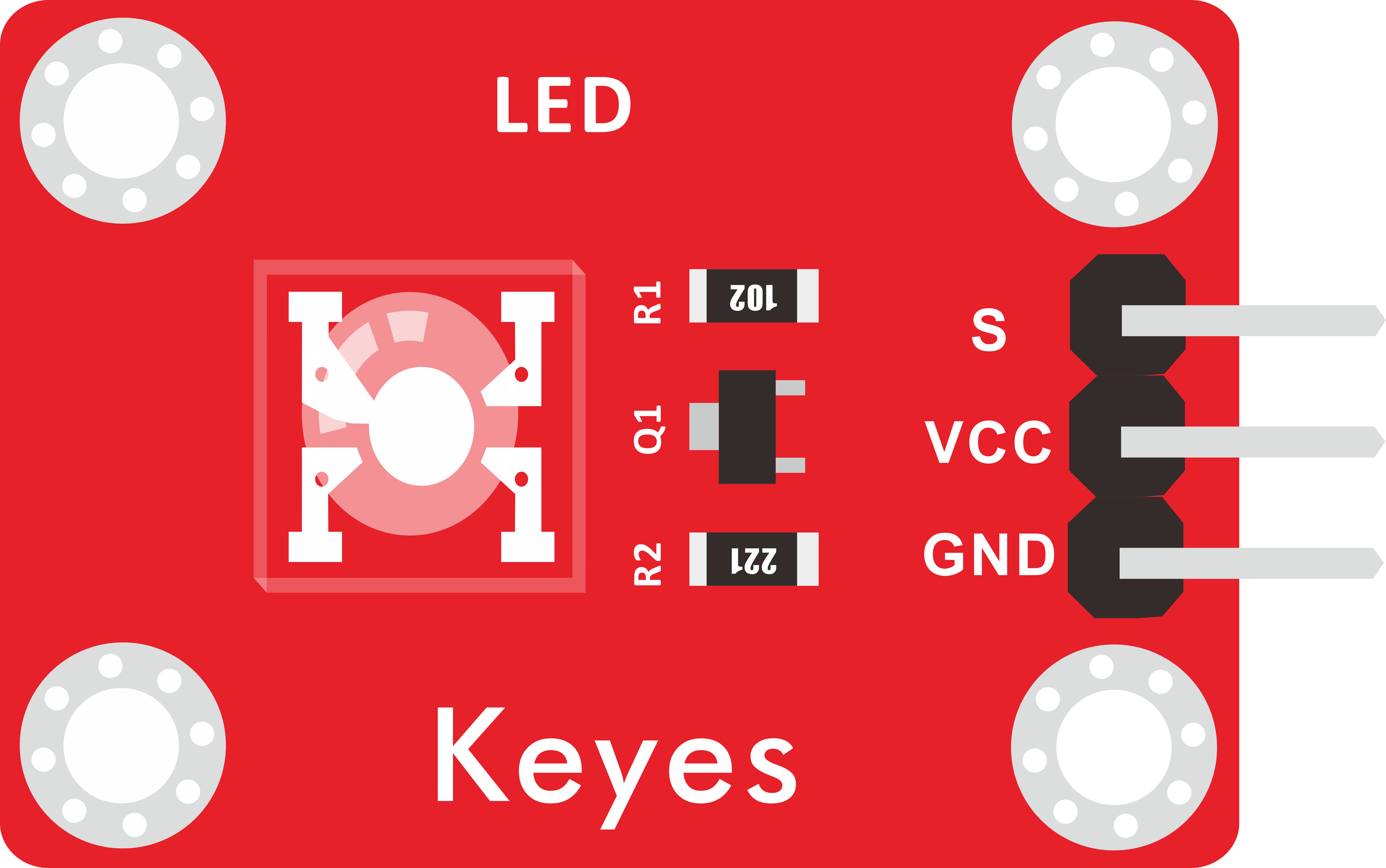
keyes 草帽LED白发红模块*1 |
Keyes connectors 循迹传感器*1 |
|---|---|---|---|
|
|
|
|
XH2.54转PH2.0 5P 连接线*1 |
3Pin 双母头杜邦线*1 |
USB线*1 |
18650双节电池盒*1 |
|
|
|
|


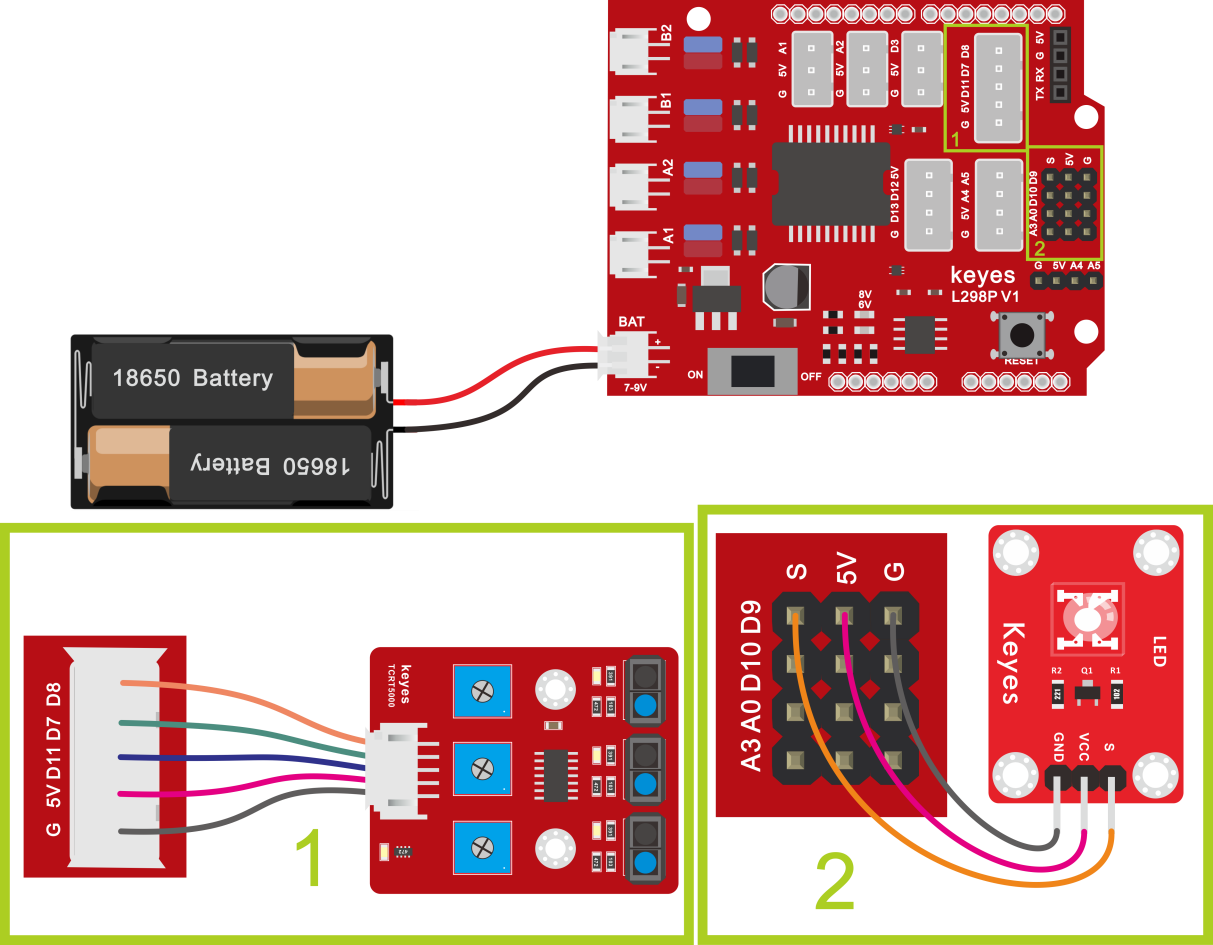
(4)接线图:#
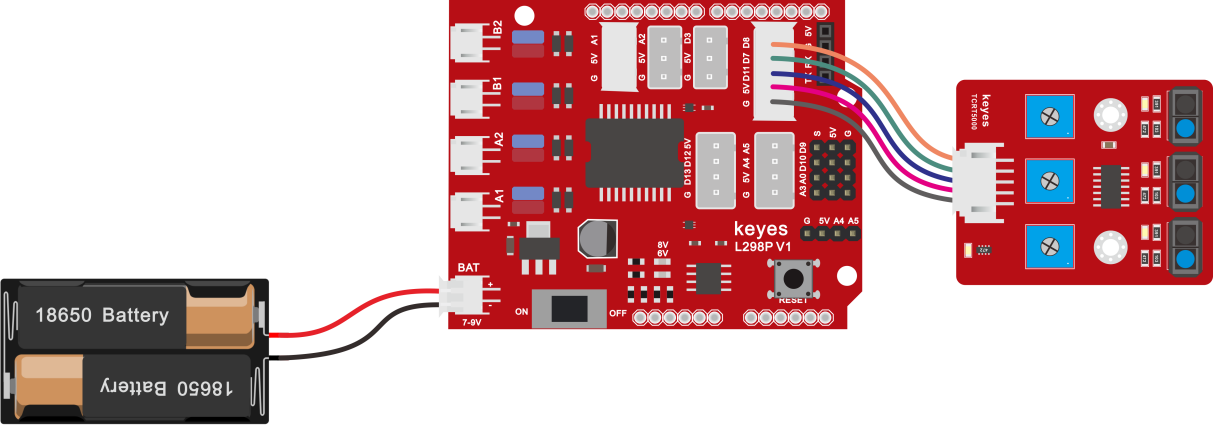
循迹传感器接扩展板的D11、D7、D8引脚(左11,中7,右8)。
(5)项目代码:#
/*
keyes 4WD 多功能智能车
课程 3.1
线路跟踪传感器
http://www.keyes-robot.com
*/
#define L_PIN 11 // 左侧线路跟踪传感器引脚
#define M_PIN 7 // 中间线路跟踪传感器引脚
#define R_PIN 8 // 右侧线路跟踪传感器引脚
int valL, valM, valR; // 三个传感器的变量值
/* 功能:初始化串口和传感器引脚 */
void setup() {
Serial.begin(9600); // 初始化串口通信,波特率 9600
pinMode(L_PIN, INPUT); // 设置左传感器引脚为输入
pinMode(M_PIN, INPUT); // 设置中传感器引脚为输入
pinMode(R_PIN, INPUT); // 设置右传感器引脚为输入
}
/* 功能:读取传感器值并通过串口输出 */
void loop() {
valL = digitalRead(L_PIN); // 读取左传感器值
valM = digitalRead(M_PIN); // 读取中传感器值
valR = digitalRead(R_PIN); // 读取右传感器值
Serial.print("left: "); Serial.print(valL); // 输出左传感器值
Serial.print(" middle: "); Serial.print(valM); // 输出中传感器值
Serial.print(" right: "); Serial.println(valR); // 输出右传感器值并换行
delay(500); // 延时 500 毫秒,保证读取稳定
}
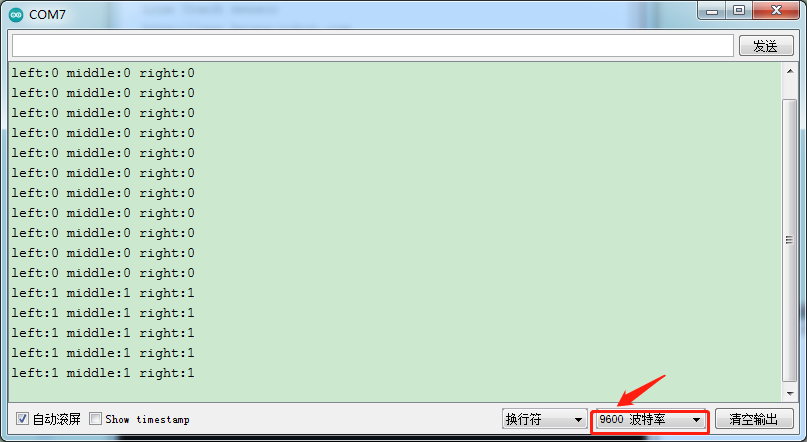
(6)项目结果:#
上传代码带开发板,打开串口监视,可以看到左中右三个循迹传感器的状态,如果我们用白纸去遮挡传感器,传感器的状态都是0。在没有接收到信号的时候,三个传感器都是高电平状态,显示的数值是1。
(7)代码说明:#
Serial.begin(9600)-初始化串口,串口通信波特率为9600 ,
**pinMode-**定义单片机PIN脚模式是输入还是输出,input是输入,output是输出,
**digitalRead-**读取引脚电平状态,一般有两种状态,HIGH或者LOW。
(8)项目拓展:#
上面我们了解了循迹传感器的工作原理,接下来我们在第9脚接上一个LED 灯,然后通过读取循迹传感器的状态,来控制LED的亮和灭。如下图接线:
我们开始来编写代码:
示例代码 2(KE0165_3.2.ino):
/*
keyes 4WD 多功能智能车
课程 3.2
线路跟踪传感器
http://www.keyes-robot.com
*/
#define L_PIN 11 // 左侧线路跟踪传感器引脚
#define M_PIN 7 // 中间线路跟踪传感器引脚
#define R_PIN 8 // 右侧线路跟踪传感器引脚
#define LED_PIN 9 // LED 灯引脚
int valL, valM, valR; // 三个传感器的变量值
/* 功能:初始化串口和引脚模式 */
void setup() {
Serial.begin(9600); // 初始化串口通信,波特率 9600
pinMode(L_PIN, INPUT); // 设置左传感器引脚为输入
pinMode(M_PIN, INPUT); // 设置中间传感器引脚为输入
pinMode(R_PIN, INPUT); // 设置右传感器引脚为输入
pinMode(LED_PIN, OUTPUT); // 设置 LED 引脚为输出
}
/* 功能:读取传感器值,输出串口信息,并控制 LED 灯 */
void loop() {
valL = digitalRead(L_PIN); // 读取左传感器值
valM = digitalRead(M_PIN); // 读取中间传感器值
valR = digitalRead(R_PIN); // 读取右传感器值
Serial.print("left: "); // 输出左传感器值
Serial.print(valL);
Serial.print(" middle: "); // 输出中间传感器值
Serial.print(valM);
Serial.print(" right: "); // 输出右传感器值
Serial.println(valR);
if (valL == LOW || valM == LOW || valR == LOW) { // 任一传感器检测到信号
digitalWrite(LED_PIN, HIGH); // LED 灯灭
} else {
digitalWrite(LED_PIN, LOW); // LED 灯亮
}
}