第19课 网页远程控制校门#
在智慧校园的建设浪潮中,智能管控与远程互联正成为校园现代化的重要标志。本项目以"网页远程控制校门开关"为主题,带领您深入探索物联网技术在校园安全管理中的创新应用。
现在开始,用技术守护校园安全,用创新构建智慧管理环境,共同探索物联网技术在教育领域的无限可能!
19.1 工作原理#
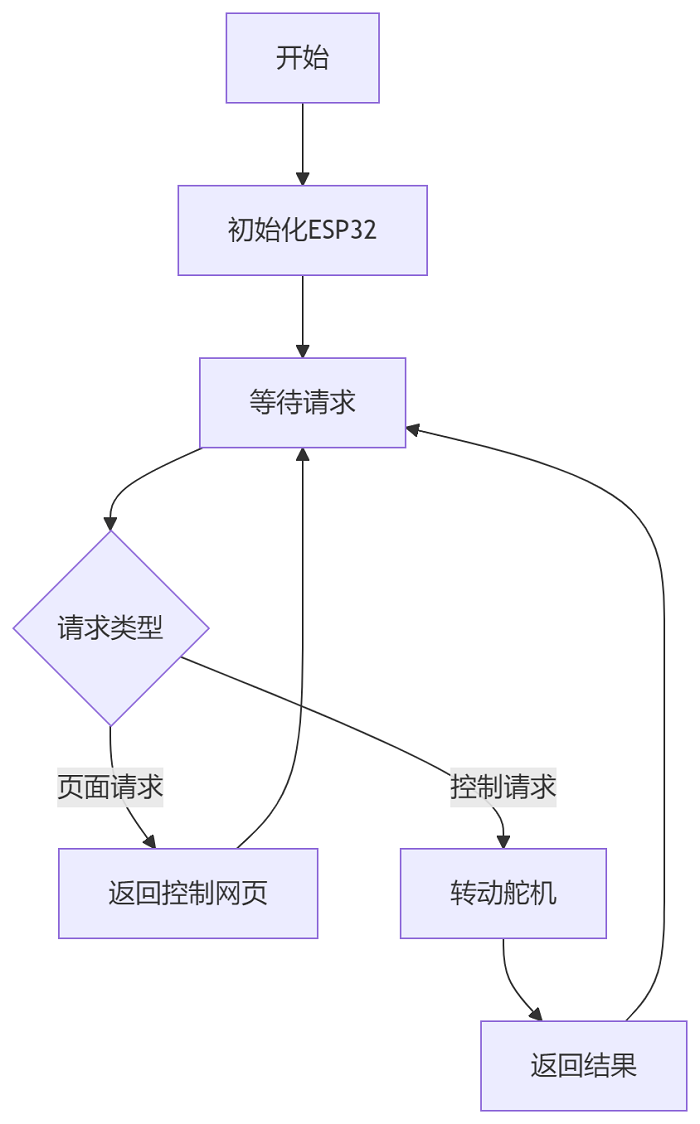
手机浏览器 → WiFi → ESP32 → 控制舵机转动 → 校门开/关
手机/电脑 打开网页(输入ESP32的IP地址)
点击按钮(开门/关门)
ESP32收到指令(通过WiFi)
舵机转动(180°或90°,对应校门开和关)
19.2 流程图#
19.3 实验代码#
⚠️ 特别提醒: 打开代码文件后,需要分别将代码中的 YourWiFiSSID 和 YourWiFiPassword 替换为您自己的 WiFi名称 和 WiFi密码。
const char* ssid = "YourWiFiSSID"; // 修改为你的WiFi名称
const char* password = "YourWiFiPassword"; // 修改为你的WiFi密码
⚠️ 特别注意:请确保代码中的WiFi名称和WiFi密码与连接到您的电脑、手机/平板、ESP32开发板和路由器的网络相同,它们必须在同一局域网(WiFi)内。
⚠️ 特别注意:WiFi必须是2.4Ghz频率的,否则ESP32无法连接WiFi。
#include <WiFi.h> // 提供ESP32的WiFi连接功能
#include <WebServer.h> // 提供ESP32的Web服务器功能
#include <ESP32Servo.h> // 专门用于ESP32的舵机控制库
#include <Adafruit_GFX.h> // 专门用于OLED控制库
#include <Adafruit_SH110X.h> // 专门用于OLED控制库
// 设置WiFi名称和WiFi密码
const char* ssid = "YourWiFiSSID"; // 修改为你自己的WiFi名称
const char* password = "YourWiFiPassword"; // 修改为你自己的WiFi密码
WebServer server(80);
Servo myServo;
// 舵机控制引脚
const int servoPin = 32;
// OLED 配置
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1 // 共享 I2C 重置操作
#define I2C_ADDRESS 0x3C // 默认0x3C地址
// 创建一个显示对象
Adafruit_SH1106G display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
void handleRoot() {
// 发送 HTML 页面
String html = R"rawliteral(
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>ESP32 Servo Control</title>
<style>
body {
font-family: Arial, sans-serif;
text-align: center;
margin: 0;
padding: 20px;
background-color: #f5f5f5;
}
.container {
max-width: 400px;
margin: 0 auto;
background: white;
padding: 20px;
border-radius: 10px;
box-shadow: 0 0 10px rgba(0,0,0,0.1);
}
h1 {
color: #333;
}
.btn {
display: inline-block;
padding: 15px 30px;
margin: 10px;
font-size: 18px;
border: none;
border-radius: 5px;
cursor: pointer;
transition: background-color 0.3s;
}
.open-btn {
background-color: #4CAF50;
color: white;
}
.close-btn {
background-color: #f44336;
color: white;
}
.btn:hover {
opacity: 0.9;
}
.status {
margin-top: 20px;
padding: 10px;
border-radius: 5px;
font-weight: bold;
}
.open {
background-color: #d4edda;
color: #155724;
}
.closed {
background-color: #f8d7da;
color: #721c24;
}
</style>
</head>
<body>
<div class="container">
<h1>校门控制</h1>
<button class="btn open-btn" onclick="controlServo(180)">打开校门</button>
<button class="btn close-btn" onclick="controlServo(90)">关闭校门</button>
<div id="status" class="status">状态: 不知道</div>
</div>
<script>
function controlServo(angle) {
// Update status display
const statusElem = document.getElementById('status');
statusElem.textContent = angle === 180 ? '状态: 校门开...' : '状态: 校门关...';
statusElem.className = 'status';
// Send a request to ESP32
fetch(`/control?angle=${angle}`)
.then(response => response.text())
.then(data => {
statusElem.textContent = `状态: ${angle === 180 ? '校门开' : '校门关'}`;
statusElem.className = `status ${angle === 180 ? 'open' : 'closed'}`;
})
.catch(error => {
console.error('Error:', error);
statusElem.textContent = 'Operation failed. Please try again';
statusElem.className = 'status';
});
}
</script>
</body>
</html>
)rawliteral";
server.send(200, "text/html", html);
}
void handleControl() {
if (server.hasArg("angle")) {
int angle = server.arg("angle").toInt();
// 控制舵机使其旋转至指定角度
myServo.write(angle);
// 接收回复
String message = angle == 180 ? "Door opened" : "Door closed"; // 原始字符串字面量
server.send(200, "text/plain", message); // 发送HTML响应
Serial.print("Servo rotates to: ");
Serial.print(angle);
Serial.println("°");
} else {
server.send(400, "text/plain", "参数错误");
}
}
void setup() {
Serial.begin(9600);
Wire.begin(); // 初始化I2C总线
// 初始化 OLED
if(!display.begin(I2C_ADDRESS, true)) { // 真正的分辨率是 128x64
Serial.println("SH1106初始化失败");
while(1); // 陷入困境且无法继续前进
}
// 清空屏幕并设置文本属性
display.clearDisplay();
display.setTextSize(1); // 文本尺寸
display.setTextColor(SH110X_WHITE); // 单色显示
display.setCursor(0, 0); // 设定起始位置
// 允许 ESP32 使用舵机
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
// 连接WiFi
WiFi.begin(ssid, password);
Serial.print("正在连接WiFi...");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("已连接Wi-Fi.");
Serial.print("IP: ");
Serial.println(WiFi.localIP());
display.print("IP: ");
display.println(WiFi.localIP());
display.display();
// 设置舵机
myServo.setPeriodHertz(50); // 标准 50 赫兹舵机系统
myServo.attach(servoPin, 500, 2400); // 连接到舵机引脚,并设置最小和最大脉冲宽度
// 将舵机的位置初始化至校门关闭状态(90°)
myServo.write(90);
// 设置路由器
server.on("/", handleRoot);
server.on("/control", handleControl);
// 启动服务器
server.begin();
Serial.println("HTTP服务器已启动");
}
void loop() {
server.handleClient();
}
19.4 代码说明#
注意:此课程涉及HTML、CSS、JS等课外知识, 只做简单介绍。
1. 库引入详解
#include <WiFi.h> // 提供ESP32的WiFi连接功能
#include <WebServer.h> // 提供ESP32的Web服务器功能
#include <ESP32Servo.h> // 专门用于ESP32的舵机控制库
WiFi.h:使ESP32能够连接无线网络,作为Web服务器
WebServer.h:让ESP32能够处理HTTP请求和响应
ESP32Servo.h:简化舵机控制,提供高级API控制舵机角度
2. 常量和全局变量定义
// 网络凭证 - 需要用户修改的部分
const char* ssid = "YourWiFiSSID"; // WiFi名称
const char* password = "YourWiFiPassword"; // WiFi密码
WebServer server(80); // 创建Web服务器实例,监听80端口(HTTP默认端口)
Servo myServo; // 创建舵机对象实例
const int servoPin = 32; // 舵机信号线连接的GPIO引脚
3. 网页请求处理函数
handleRoot()函数
此函数处理对根路径(“/”)的请求,返回完整的HTML页面:
void handleRoot() {
String message = angle == 180 ? "Door opened" : "Door closed"; // 原始字符串字面量
server.send(200, "text/plain", message); // 发送HTML响应
}
页面结构:
包含标题 “校门控制”
两个控制按钮(开门和关门)
状态显示区域
handleControl()函数
处理控制请求(“/control”):
void handleControl() {
if (server.hasArg("angle")) {
int angle = server.arg("angle").toInt();
// 控制舵机使其旋转至指定角度
myServo.write(angle);
// 接收回复
String message = angle == 180 ? "Door opened" : "Door closed"; // 原始字符串字面量
server.send(200, "text/plain", message); // 发送HTML响应
Serial.print("Servo rotates to: ");
Serial.print(angle);
Serial.println("°");
} else {
server.send(400, "text/plain", "参数错误");
}
}
4. setup()函数详解
void setup() {
Serial.begin(9600);
Wire.begin(); // 初始化I2C总线
// 初始化 OLED
if(!display.begin(I2C_ADDRESS, true)) { // 真正的分辨率是 128x64
Serial.println("SH1106初始化失败");
while(1); // 陷入困境且无法继续前进
}
// 清空屏幕并设置文本属性
display.clearDisplay();
display.setTextSize(1); // 文本尺寸
display.setTextColor(SH110X_WHITE); // 单色显示
display.setCursor(0, 0); // 设定起始位置
// 允许 ESP32 使用舵机
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
// 连接WiFi
WiFi.begin(ssid, password);
Serial.print("正在连接WiFi...");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("已连接Wi-Fi.");
Serial.print("IP: ");
Serial.println(WiFi.localIP());
display.print("IP: ");
display.println(WiFi.localIP());
display.display();
// 设置舵机
myServo.setPeriodHertz(50); // 标准 50 赫兹舵机系统
myServo.attach(servoPin, 500, 2400); // 连接到舵机引脚,并设置最小和最大脉冲宽度
// 将舵机的位置初始化至校门关闭状态(90°)
myServo.write(90);
// 设置路由器
server.on("/", handleRoot);
server.on("/control", handleControl);
// 启动服务器
server.begin();
Serial.println("HTTP服务器已启动");
}
5. loop()函数
void loop() {
server.handleClient(); // 处理客户端请求
}
此函数不断检查并处理来自客户端的HTTP请求,保持Web服务器运行。
19.5 实验结果#
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击
 按钮上传代码。代码上传成功后,设置波特率为
按钮上传代码。代码上传成功后,设置波特率为 9600,可以看到打印的IP地址 (如果看不到,可以按下复位按键重新连接一次):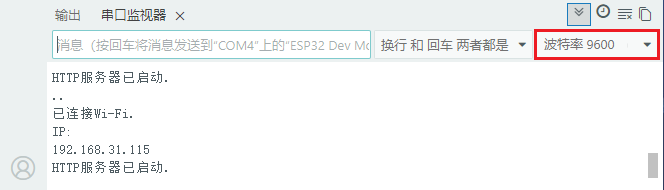
OLED显示屏上同步显示IP地址:

在手机/电脑的浏览器中输入IP地址即可访问校门控制页面。
⚠️ 注意:确保手机/电脑与ESP32连接到同一个 WiFi 。


打开校门:开门按钮

关闭校门:关门按钮

状态:显示当前校门的开关状态
19.6 常见问题解决#
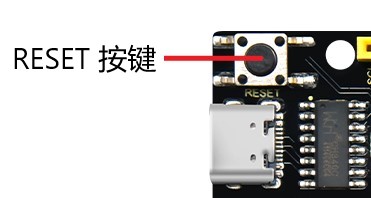
若串口监视器无任何信息打印,请按下ESP32主板的复位键:
若ESP32 一直没有获取到 IP 地址,通常是因为 WiFi 连接失败,解决办法:
确保代码里的 WiFi 名称和 WiFi密码已经替换为您自己的 Wi-Fi名称 和 WiFi密码。
确保你的 WiFi 网络是 2.4GHz 的,ESP32不支持 5GHz WiFi。
若输入IP地址无页面,解决办法:
确保IP地址输入正确。
检查手机/电脑是否与ESP32在同一网络。