第7课 校园智能门禁#
让我们用RFID刷卡模块和舵机打造一个校园智能门禁系统,通过刷卡识别身份并自动控制门开与关,体验安全便捷的智慧校园生活!
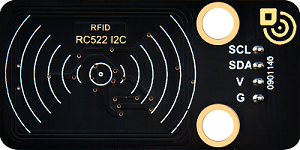
7.1 RFID刷卡模块#
RFID刷卡模块是一种基于无线射频识别技术的非接触式读卡设备,可快速识别IC卡或电子标签中的身份信息,广泛应用于门禁、考勤和支付系统。
7.1.1 参数#
工作电压:DC 5V
工作电流:13 ~ 100 mA / DC 5V
空闲电流:10 ~ 13 mA / DC 5V
休眠电流:< 80 uA
峰值电流:< 100 mA
工作频率:13.56 MHz
最大功率: 0.5 W
数据传输速率:最大10Mbit/s
工作温度:-10°C ~ +50°C
尺寸:48mm x 24mm x 8 mm
定位孔大小:直径为 4.8 mm
接口:间距2.54 mm,4pin弯针接口
7.1.2 原理#
工作流程
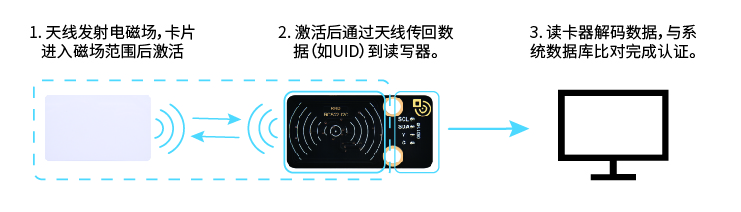
(1)能量传输
读卡器天线发射电磁场 → 为无源RFID卡(无电池)提供能量。
(2)数据交互
卡片进入磁场范围后激活 → 通过负载调制将卡内数据(如:卡号)传回读卡器。
(3)身份验证
读卡器解码数据 → 与系统数据库比对完成认证。
7.1.3 实验代码#
#include <Wire.h> // I2C通信库
#include "MFRC522_I2C.h" // MFRC522的I2C驱动库
MFRC522 mfrc522(0x28); // 创建MFRC522对象,I2C地址设为0x28
void setup() {
Serial.begin(9600); // 初始化串口(调试用)
Wire.begin(); // 初始化I2C总线(默认SDA=GPIO21, SCL=GPIO22)
mfrc522.PCD_Init(); // 初始化MFRC522读卡器
ShowReaderDetails(); // 显示读卡器版本信息
Serial.println(F("扫描PICC卡即可查看用户识别码、类型以及数据块信息..."));
}
void loop() {
// 检测是否有新卡片 && 能否成功读取卡片数据
if ( ! mfrc522.PICC_IsNewCardPresent() || ! mfrc522.PICC_ReadCardSerial() ) {
delay(50); // 降低轮询频率,减少CPU占用
return; // 无卡或读卡失败时退出
}
// 打印RFID卡的卡号(16进制格式)
Serial.print(F("卡号:"));
for (byte i = 0; i < mfrc522.uid.size; i++) {
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(mfrc522.uid.uidByte[i], HEX);
}
Serial.println();
}
void ShowReaderDetails() {
// 获得MFRC522软件
byte v = mfrc522.PCD_ReadRegister(mfrc522.VersionReg);
Serial.print(F("MFRC522 Software Version: 0x"));
Serial.print(v, HEX);
// 版本判断
if (v == 0x91)
Serial.print(F(" = v1.0"));
else if (v == 0x92)
Serial.print(F(" = v2.0"));
else
Serial.print(F(" (unknown)"));
Serial.println("");
// 通信故障检测,返回0x00或0xFF时,可能是通信信号传输失败
if ((v == 0x00) || (v == 0xFF)) {
Serial.println(F("警告: 通信失败, MFRC522是否已正确连接?"));
}
}
7.1.4 代码说明#
1. 头文件与对象初始化
#include <Wire.h> // I2C通信库
#include "MFRC522_I2C.h" // MFRC522的I2C驱动库
MFRC522 mfrc522(0x28); // 创建MFRC522对象,I2C地址设为0x28
MFRC522_I2C.h:MFRC522模块的专用I2C驱动库。MFRC522 mfrc522(0x28):初始化MFRC522对象,I2C地址设为0x28。
2. 初始化设置(setup函数)
void setup() {
Serial.begin(9600); // 初始化串口(调试用)
Wire.begin(); // 初始化I2C总线(ESP32默认SDA=GPIO21, SCL=GPIO22)
mfrc522.PCD_Init(); // 初始化MFRC522读卡器
ShowReaderDetails(); // 显示读卡器版本信息
Serial.println(F("扫描PICC卡即可查看用户识别码、类型以及数据块信息..."));
}
mfrc522.PCD_Init():配置读卡器的射频参数和通信协议。ShowReaderDetails():验证硬件连接是否正常。
3. 主循环(loop函数)
void loop() {
// 检测是否有新卡片 && 能否成功读取卡片数据
if ( ! mfrc522.PICC_IsNewCardPresent() || ! mfrc522.PICC_ReadCardSerial() ) {
delay(50); // 降低轮询频率,减少CPU占用
return; // 无卡或读卡失败时退出
}
// 打印RFID卡的卡号(16进制格式)
Serial.print(F("卡号:"));
for (byte i = 0; i < mfrc522.uid.size; i++) {
Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
Serial.print(mfrc522.uid.uidByte[i], HEX);
}
Serial.println();
}
mfrc522.PICC_IsNewCardPresent():检测是否有卡进入射频场。mfrc522.PICC_ReadCardSerial():激活卡片并读取UID(卡号)。
4. ShowReaderDetails() 函数
void ShowReaderDetails() {
byte v = mfrc522.PCD_ReadRegister(mfrc522.VersionReg);
Serial.print(F("MFRC522 Software Version: 0x"));
Serial.print(v, HEX);
// 版本判断
if (v == 0x91) Serial.print(F(" = v1.0"));
else if (v == 0x92) Serial.print(F(" = v2.0"));
else Serial.print(F(" (unknown)"));
// 通信故障检测
if ((v == 0x00) || (v == 0xFF)) {
Serial.println(F("警告: 通信失败, MFRC522是否已正确连接?"));
}
}
mfrc522.PCD_ReadRegister(mfrc522.VersionReg):读取MFRC522的版本号。若返回
0x00或0xFF,说明I2C通信失败。地址错误时,
ShowReaderDetails()函数会报通信失败。
7.1.5 实验结果#
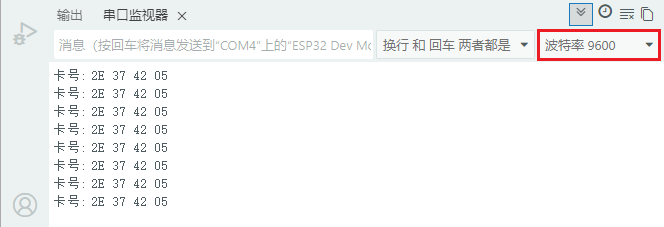
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击 按钮上传代码。代码上传成功后,单击Arduino IDE右上角的
按钮上传代码。代码上传成功后,单击Arduino IDE右上角的 ,打开串口监视器,设置串口波特率为
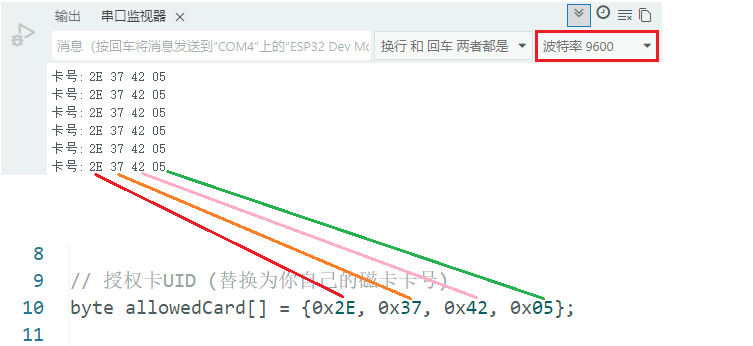
,打开串口监视器,设置串口波特率为 9600。将RFID磁卡放入磁场范围内检测,读卡器将读取到的RFID卡号以16进制的形式打印在串口监视器。
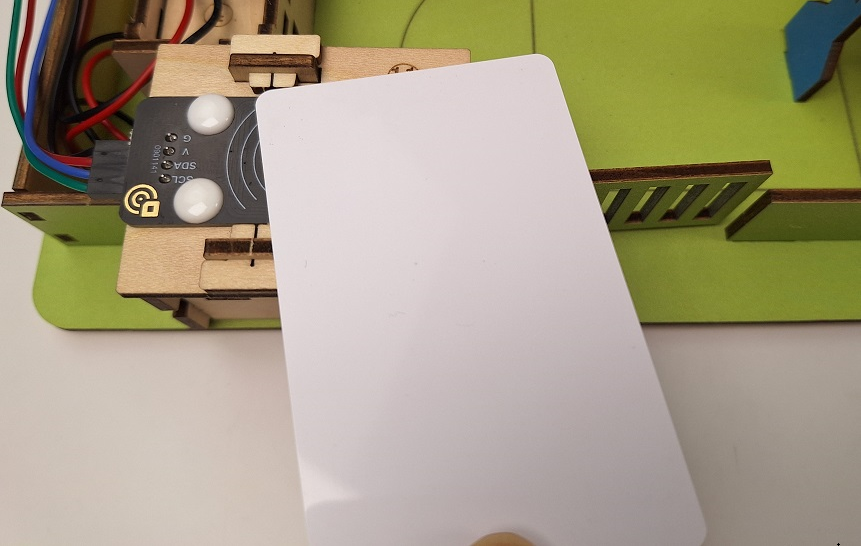
⚠️ 特别提醒:需要记下RFID刷卡模块读取你自己的RFID磁卡(白色磁卡)的卡号,下面实验代码中需要用到,需要将代码中的卡号换成你自己RFID磁卡(白色磁卡)的卡号。
7.1.6 常见问题解决#
无法读取卡片
检查I2C地址是否正确。
检查供电电压(5V)、卡片类型。
版本显示
0x00或0xFF检查I2C线路(SDA/SCL是否接反)。
确保供电电压稳定。
7.2 舵机#
舵机是一种通过接收控制信号来精确控制旋转角度的电机。
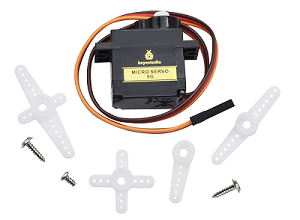
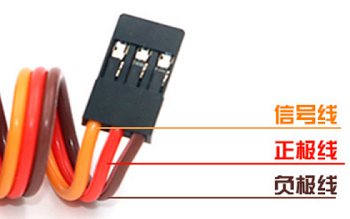
我们用到的这款舵机有三根外接线,棕色线为接地线,红色线为电源正极,橙色线为信号线。
7.2.1 参数#
工作电压:DC 3.3 ~ 5V
工作温度:-10°C ~ +50°C
尺寸:32.25mm x 12.25mm x 30.42 mm
接口:间距为2.54 mm 3pin排母接口
7.2.2 原理#
1. 舵机的工作原理
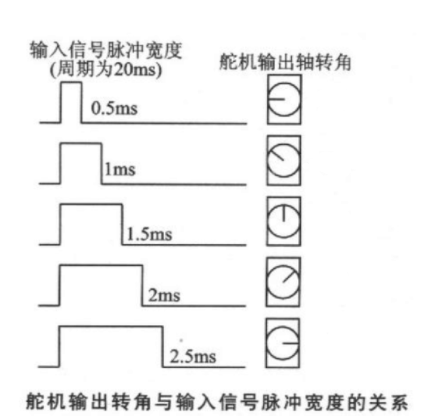
舵机是一种闭环控制的位置伺服电机,ESP32通过 PWM(脉冲宽度调制)信号 控制其角度。核心工作原理:
PWM信号输入:
ESP32生成50Hz(周期20ms)的PWM信号
脉冲宽度(高电平时间)决定角度:
0.5ms(500μs)→ 0°
1.5ms(1500μs)→ 90°(中间位置)
2.5ms(2500μs)→ 180°
引脚限制:
避免使用以下引脚(有特殊功能):
GPIO0(下载模式)
GPIO2(内部上拉)
GPIO12(启动时电平敏感)
7.2.3 实验代码#
⚠️ 请确保组装前舵机已经初始化,否则可能导致舵机堵转损坏。
#include <ESP32Servo.h> // 添加舵机库
Servo myservo; // 创建舵机对象
const int servoPin = 32; // 舵机引脚IO32
void setup() {
myservo.attach(servoPin); // 初始化舵机
}
void loop() {
myservo.write(90); // 90°
delay(1000);
myservo.write(135); // 135°
delay(1000);
myservo.write(180); // 180°
delay(1000);
}
7.2.4 代码说明#
初始化舵机(GPIO32引脚)
循环执行:
转到90° → 暂停1秒
转到135° → 暂停1秒
转到180° → 暂停1秒
重复循环
7.2.5 实验结果#
⚠️ 警告:舵机必须正确安装固定后才能通电运行,否则可能因堵转损坏。
⚠️ 详情请查看产品组装教程,舵机必须 先初始化 再安装。
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮上传代码。代码上传成功后,舵机会按以下规律循环运动:
立即转到90°位置 → 关门状态,保持1秒
转到135°位置 → 开关门的中间位置,保持1秒
转到180°位置 → 开门状态,保持1秒
重复此循环(90°→135°→180°→90°…)
7.3 校园智能门禁#
在前面的课程中,我们已经掌握了RFID刷卡模块的身份识别功能和舵机的机械控制原理。现在,让我们将这些技术融合创新,共同打造一个智能化的校园门禁系统!通过这个项目,我们将实现刷卡自动开锁功能,既提升校园安全,又展现科技魅力。
这套系统能够识别授权人员的RFID卡片,通过舵机驱动门锁开关。接下来,我们将从流程图到程序编写,最终实现一个稳定可靠的智能门禁原型。准备好了吗?现在就开始我们的项目开发吧!
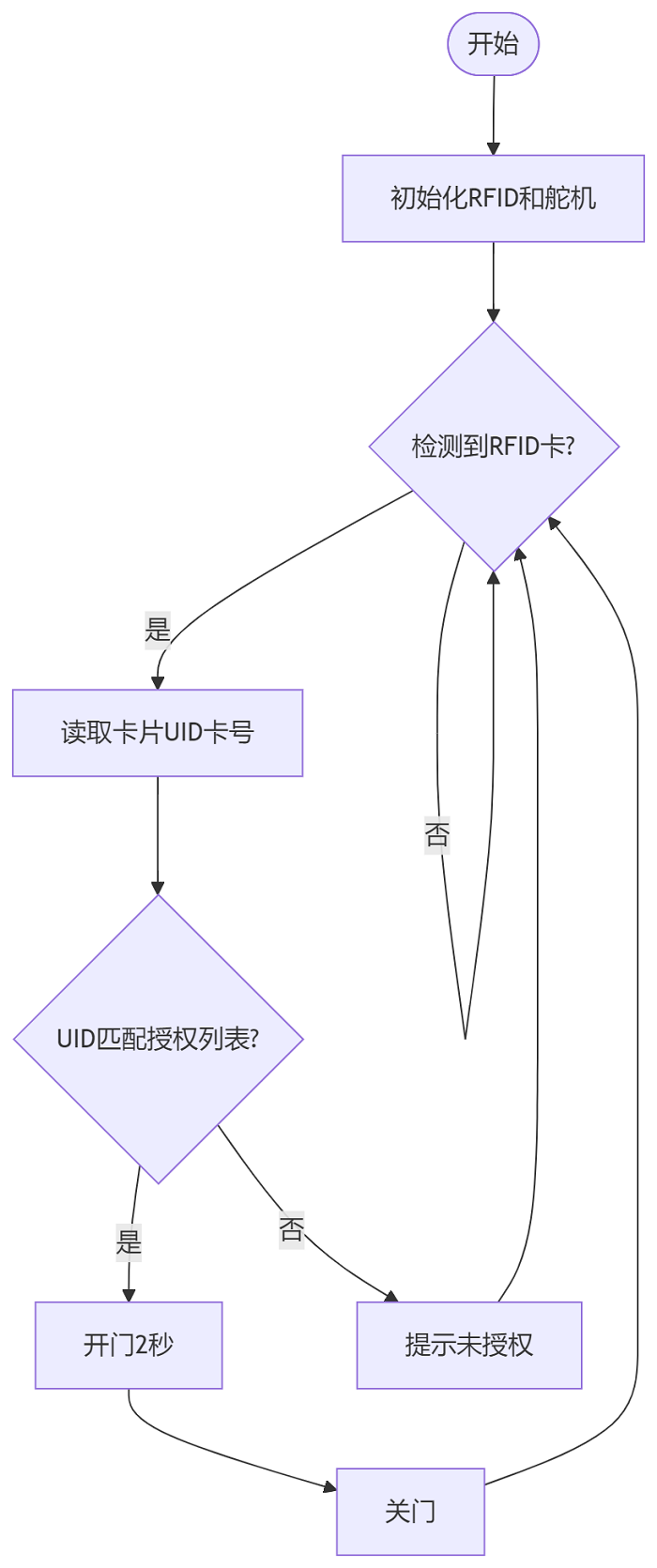
7.3.1 流程图#
7.3.2 实验代码#
⚠️ 请确保组装前舵机已经初始化,否则可能导致舵机堵转损坏。
⚠️ 上传代码前请将代码块中的RFID卡号替换成RFID刷卡模块读取你自己的白色磁卡所对应的RFID卡号。
#include <Wire.h>
#include "MFRC522_I2C.h"
#include <ESP32Servo.h>
MFRC522 rfid(0x28); // RFID读卡器
Servo doorLock; // 门锁舵机
const int servoPin = 32;
// 授权卡UID (替换为你自己的磁卡卡号)
byte allowedCard[] = {0x2E, 0x37, 0x42, 0x05};
void setup() {
Serial.begin(9600); // 串口通信(调试用)
Wire.begin(); // 初始化 I2C
rfid.PCD_Init(); // 初始化 RFID 读卡器
doorLock.attach(servoPin); // 舵机初始化
}
void loop() {
if (rfid.PICC_IsNewCardPresent() && rfid.PICC_ReadCardSerial()) { // 检测到新卡?
if (memcmp(rfid.uid.uidByte, allowedCard, 4) == 0) { // 检查是否授权卡
doorLock.write(180); // 开门(180°)
delay(2000); // 保持开门 2 秒
doorLock.write(90); // 关门(90°)
}
rfid.PICC_HaltA(); // 停止读卡
}
delay(100);
}
7.3.3 代码说明#
1. 授权卡设置
byte allowedCard[] = {0x2E, 0x37, 0x42, 0x05}; // 替换为你自己的 RFID卡号
这里只支持一张授权卡,RFID卡号 需要替换成你自己的 RFID卡号。
2. 初始化设置(setup函数)
void setup() {
Serial.begin(9600); // 串口通信(调试用)
Wire.begin(); // 初始化 I2C
rfid.PCD_Init(); // 初始化 RFID 读卡器
doorLock.attach(servoPin); // 舵机初始化
}
3. 主循环 (loop函数)
void loop() {
if (rfid.PICC_IsNewCardPresent() && rfid.PICC_ReadCardSerial()) { // 检测到新卡?
if (memcmp(rfid.uid.uidByte, allowedCard, 4) == 0) { // 检查是否授权卡
doorLock.write(180); // 开门(180°)
delay(2000); // 保持开门 2 秒
doorLock.write(90); // 关门(90°)
}
rfid.PICC_HaltA(); // 停止读卡
}
delay(100); // 防抖 & 降低 CPU 占用
}
PICC_IsNewCardPresent():检测是否有新卡靠近。PICC_ReadCardSerial():读取卡片的UID(卡号)。memcmp():比较读取的 UID 是否匹配allowedCard。匹配 → 开门(
180°),2 秒后自动关门(90°)。不匹配 → 无操作(门保持关闭)。
PICC_HaltA():停止当前读卡,准备检测下一张卡。
7.3.4 实验结果#
⚠️ 警告:舵机必须正确安装固定后才能通电运行,否则可能因堵转损坏。
⚠️ 详情请查看产品组装教程,舵机必须 先初始化 再安装。
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮上传代码。代码上传成功后,智能门禁系统循环检测:
有卡 → 读RFID卡号 → 匹配成功 → 开门 → 延时2秒 → 关门
有卡 → 读RFID卡号 → 匹配失败 → 提示未授权
无卡 → 继续检测
7.3.5 常见问题解决#
无法检测卡片
检查I2C地址是否错误、接线是否松动
舵机不转动
检查供电电压,外接电源
确保安装前已将舵机初始化
串口输出乱码
确保串口监视器设为9600