第6课 智能篮球计分器#
让我们用避障传感器和 OLED 显示屏打造一个智能篮球计分器,通过精准检测进球并实时显示比分,体验科技与体育的完美结合!
6.1 避障传感器#
这款避障传感器是一种基于红外原理的检测设备,能够实时感知前方障碍物的距离,广泛应用于机器人、智能小车和自动避障系统中。
6.1.1 参数#
工作电压:DC 5V
电流:50 mA
最大功率:0.25 W
工作温度:-10°C ~ +50°C
输出信号:数字信号
感应距离:2 ~ 40 cm
尺寸:32mm x 23mm x 12mm
定位孔大小:直径为 4.8 mm
接口:间距2.54 mm,3pin防反接口
6.1.2 原理#
工作原理:
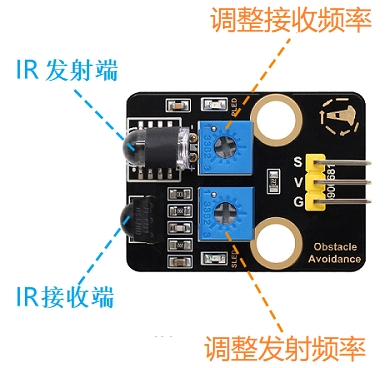
发射红外光:
红外发射管发射一束红外光。
接收反射光:
如果前方有障碍物,红外光会被反射回来,被红外接收头接收。
信号处理:
传感器内部的电路根据接收到的反射光强度判断障碍物的距离。
输出信号为数字信号(高电平或低电平)。
避障传感器受环境光干扰较大,检测距离较短(通常为 2cm ~ 30cm)。
调节传感器灵敏度:
调节避障传感器模块上的电位器可以改变传感器的灵敏度和检测距离。以下是调节步骤和注意事项。
首先,将两个电位器分别顺时针调到尽头,然后分别逆时针慢慢往回调,调到中间位置(默认状态)。
先调节接收功率,将电位器顺时针调到尽头,然后逆时针慢慢往回调,微调使传感器上SLED灯介于刚刚亮与不亮之间的 不亮 状态。
接着调节发射频率,同样将电位器顺时针调到尽头,然后逆时针慢慢往回调,微调使传感器上SLED灯介于刚刚亮与不亮之间的 不亮 状态。
调节完毕,可以开始使用了。投球测试,当篮球掉入篮筐的一刹那,能看到SLED灯亮起。
若调节时保持传感器探头前方 远离障碍物 或 没有障碍物 阻挡,能将检测距离调整到最大。
6.1.3 实验代码#
const int obstacle_avoidance = 18; // 定义避障传感器引脚
int val = 0; // 定义变量val
void setup() {
Serial.begin(9600);
pinMode(obstacle_avoidance, INPUT);
}
void loop() {
val = digitalRead(obstacle_avoidance); //读取数字电平
Serial.print(val); //打印读取的电平信号
if (val == 0) { //障碍物检测
Serial.println("\t 检测到障碍物");
delay(100);
}
else { //未发现障碍物
Serial.println("\t 未检测到障碍物");
delay(100);
}
}
6.1.4 代码说明#
读取避障传感器的输出信号。
0:检测到障碍物。1:未检测到障碍物。
根据信号判断是否有障碍物:
如果检测到障碍物,输出
检测到障碍物。如果未检测到障碍物,输出
未检测到障碍物。
每0.1秒更新一次。
通过串口监视器实时显示检测结果。
6.1.5 实验结果#
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击 按钮上传代码。代码上传成功后,单击Arduino IDE右上角的
按钮上传代码。代码上传成功后,单击Arduino IDE右上角的 ,打开串口监视器,波特率设置为
,打开串口监视器,波特率设置为 9600:
当未检测到障碍物时,输出
1和未检测到障碍物。当检测到障碍物时,输出
0和检测到障碍物。

6.2 智能篮球计分器#
在前面的课程中,我们已经学习了避障传感器和 OLED 显示屏的基本原理与使用方法。现在,让我们将这些知识结合起来,动手制作一个智能篮球计分器!通过这个项目,我们将实现一个能够精准检测进球并实时显示比分的智能系统,既提升比赛体验,又充满科技感。
接下来,我们将一步步完成硬件连接、代码编写和功能调试,最终打造出一个实用的智能篮球计分器。让我们一起开启这段充满创意与挑战的旅程吧!
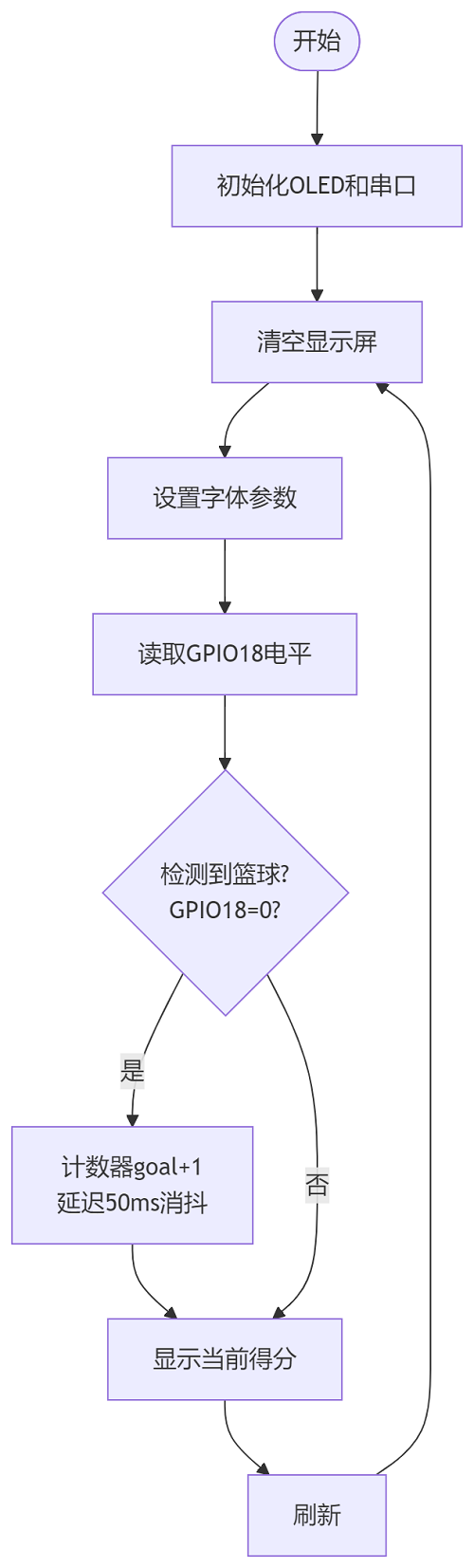
6.2.1 流程图#
6.2.2 实验代码#
#include <Wire.h> // I2C通信库
#include <Adafruit_GFX.h> // Adafruit图形库
#include <Adafruit_SH110X.h> // SH1106 OLED驱动库
#define SCREEN_WIDTH 128 // OLED宽度(像素)
#define SCREEN_HEIGHT 64 // OLED高度(像素)
#define OLED_RESET -1 // 共用I2C复位(无硬件复位)
#define I2C_ADDRESS 0x3C // SH1106默认I2C地址
// 创建显示对象
Adafruit_SH1106G display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
const int sensorPin = 18; // 定义避障传感器的引脚
volatile int goalCount = 0; // 使用volatile保证中断安全
unsigned long lastDetectTime = 0; //上次检测时间(用于消抖)
const int debounceTime = 50; // 消抖时间(ms)
void setup() {
Serial.begin(9600); // 初始化串口(调试用)
// 初始化OLED
if(!display.begin(I2C_ADDRESS, true)) { // true表示128x64分辨率
Serial.println("SH1106初始化失败");
while(1); // 卡住不再继续
}
// 清屏并设置文本属性
display.clearDisplay(); // OLED清屏
display.setTextSize(3); // 文本大小
display.setTextColor(SH110X_WHITE); // 白色文本
// 配置避障传感器
pinMode(sensorPin, INPUT);
attachInterrupt(digitalPinToInterrupt(sensorPin), detectCallback, FALLING);
}
void detectCallback() { // 计数回调函数
if (millis() - lastDetectTime > debounceTime) {
goalCount++;
lastDetectTime = millis();
}
}
void loop() {
// OLED显示计数
display.clearDisplay();
display.setCursor(40, 20); // 居中显示
display.println(goalCount);
display.display(); // 刷新屏幕
}
6.2.3 代码说明#
1. 头文件、常量与变量定义
#include <Wire.h> // I2C通信库
#include <Adafruit_GFX.h> // Adafruit图形库
#include <Adafruit_SH110X.h> // SH1106 OLED驱动库
#define SCREEN_WIDTH 128 // OLED宽度(像素)
#define SCREEN_HEIGHT 64 // OLED高度(像素)
#define OLED_RESET -1 // 共用I2C复位(无硬件复位)
#define I2C_ADDRESS 0x3C // SH1106默认I2C地址
Adafruit_SH1106G display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); // OLED显示对象
const int sensorPin = 18; // 红外传感器连接引脚
volatile int goalCount = 0; // 中断安全的计数器变量
unsigned long lastDetectTime = 0; // 上次检测时间(用于消抖)
const int debounceTime = 50; // 消抖时间(毫秒)
OLED相关:定义了屏幕尺寸、I2C地址,并创建了显示对象。
传感器相关:指定避障传感器引脚,并设置计数器变量(
volatile确保中断安全)。消抖处理:通过
lastDetectTime和debounceTime防止信号抖动导致的误触发。
2. 初始化设置(setup函数)
void setup() {
Serial.begin(9600); // 初始化串口(调试用)
// 初始化OLED
if(!display.begin(I2C_ADDRESS, true)) { // true表示128x64分辨率
Serial.println("SH1106初始化失败");
while(1); // 卡住不再继续
}
// 清屏并设置文本属性
display.clearDisplay(); // OLED清屏
display.setTextSize(3); // 文本大小
display.setTextColor(SH110X_WHITE); // 白色文本
// 配置避障传感器
pinMode(sensorPin, INPUT);
attachInterrupt(digitalPinToInterrupt(sensorPin), detectCallback, FALLING);
}
OLED初始化。
显示设置:清屏、设置大号白色字体(适合显示数字)。
传感器配置:
通过
attachInterrupt设置下降沿触发中断(检测到物体时执行detectCallback)。
3. 中断回调函数
void detectCallback() {
if (millis() - lastDetectTime > debounceTime) {
goalCount++;
lastDetectTime = millis();
}
}
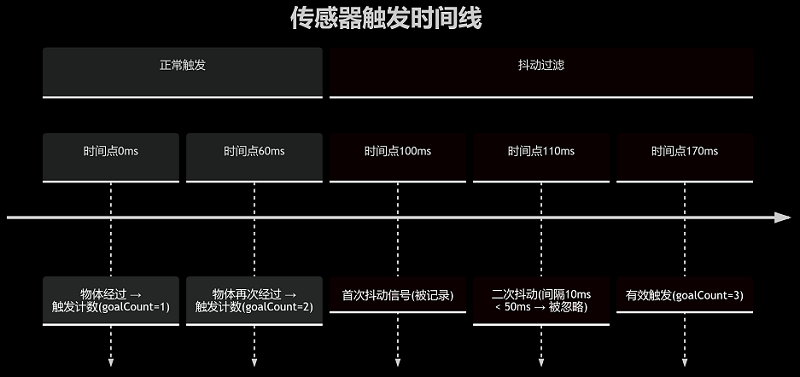
millis() 是 Arduino 编程中非常重要的一个时间函数,它的作用是 返回从程序开始运行到现在所经过的毫秒数。
当传感器检测到物体时,产生下降沿信号(电平1 → 0),触发
detectCallback()中断服务函数通过 时间差消抖(50ms间隔):
如果两次触发间隔 > 50ms → 视为有效触发
goalCount++否则视为抖动噪声,忽略此次触发
更新最后有效触发时间戳
lastDetectTime
4. 主循环(loop函数)
void loop() {
// OLED显示计数
display.clearDisplay();
display.setCursor(40, 20); // 居中显示
display.println(goalCount);
display.display(); // 刷新屏幕
}
OLED显示:清屏后显示当前计数。
6.2.4 实验结果#
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮上传代码。代码上传成功后,我们将篮球投入篮筐,进球时:
分数加 1。
OLED 屏幕实时显示当前得分。
注意: 避障传感器对环境光敏感,尽量在光线稳定的环境中使用。