第15课 语音控制智慧校园#
15.1 项目介绍#
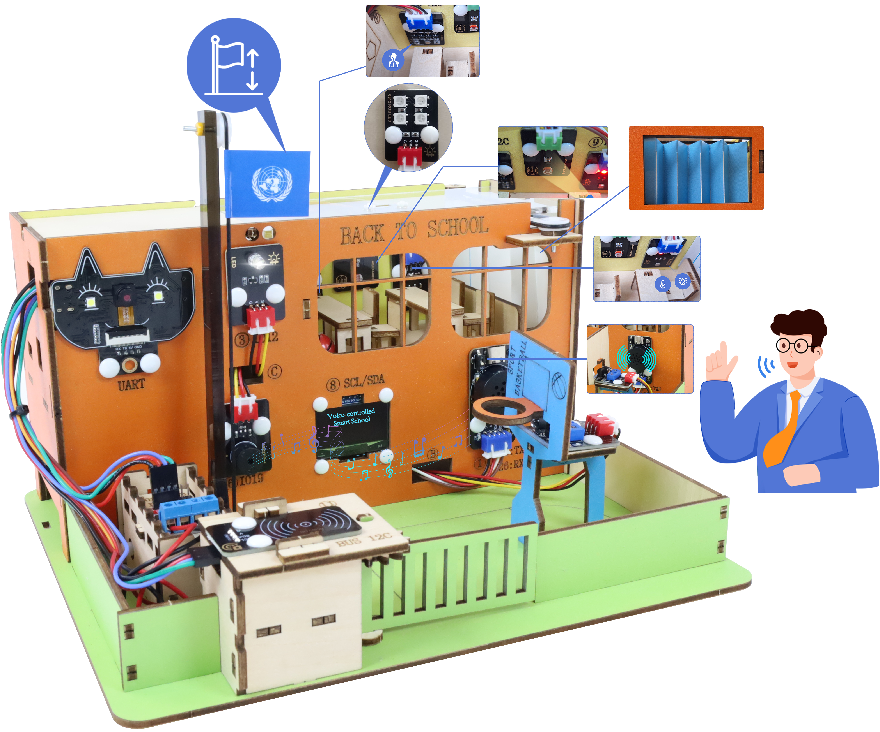
经过前面一系列的语音控制项目的学习,我们是不是可以通过智能语音模块控制智慧校园更多传感器模块呢?当然是可以的。在本项目实验中,通过ESP32主控板控制更多传感器模块,然后通过智能语音模块进行实时语音播报智慧校园教室内的温度、湿度、空气质量和光照强度等。同时,它还能控制路灯进行照明、教室内的SK6812 RGB灯亮不同颜色灯,校门开与关、窗帘拉开与关闭、校园入侵警报、旗帜升降和音乐播放等。
15.2 流程图#

15.3 实验代码#
// 导入库文件
#include <SoftwareSerial.h>
#include <DFRobot_ENS160.h>
#include <BuzzerESP32.h>
#include <Wire.h>
#include <AHT20.h>
#include <Adafruit_NeoPixel.h>
#ifdef __AVR__
#include <avr/power.h> // 需要 16 MHz Adafruit Trinket
#endif
#include <Adafruit_GFX.h>
#include <Adafruit_SH110X.h>
#include <Stepper.h> // 提供了控制步进电机的基本功能
#include <ESP32Servo.h>
Servo myservo; // 创建舵机对象来控制舵机,在ESP32上可以创建16个舵机对象
// 定义光敏电阻传感器引脚
const int PhotoresistorPin = 34;
// 定义LED引脚
const int LED_PIN = 12;
// 定义无源蜂鸣器引脚
BuzzerESP32 buzzer(19);
// 步进电机驱动板参数(28BYJ-48)
const int STEPS_PER_REV = 2038; // 实际步数/圈(不同电机可能有差异)
const int MOTOR_PIN1 = 14; // IN1
const int MOTOR_PIN2 = 27; // IN2
const int MOTOR_PIN3 = 16; // IN3
const int MOTOR_PIN4 = 17; // IN4
// 用户可调参数(步进电机)
int motorSpeed = 10; // 转速(RPM),建议5-12,超过15极易堵转
int rotationCount = 2; // 转动圈数
bool reverseDirection = false; // 反转标志位
// 初始化步进电机(注意引脚顺序IN1-IN3-IN2-IN4)
Stepper myStepper(STEPS_PER_REV, MOTOR_PIN1, MOTOR_PIN3, MOTOR_PIN2, MOTOR_PIN4);
// 电机控制状态
bool motorRunning = false;
unsigned long motorStartTime = 0;
const unsigned long MOTOR_DURATION = 800; // 0.8秒
int currentDirection = 0; // 0:停止, 1:正转, 2:反转
#define RGB_PIN 4 // 控制信号引脚
#define LED_COUNT 4 // LED 灯珠数量
// 创建 NeoPixel 对象
Adafruit_NeoPixel strip(LED_COUNT, RGB_PIN, NEO_GRB + NEO_KHZ800);
// 电机驱动引脚定义
const int INA = 5;
const int INB = 13;
const int ServoPin = 32; // 舵机的引脚
const int RX_PIN = 25; // 引脚 GPIO25 为 RX
const int TX_PIN = 26; // 引脚 GPIO26 为 TX
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 定义软件串口引脚(RX, TX)
// 定义变量用于存储从语音模块接收到的控制码
volatile int Voice_Control = 0; // 初始化为0,确保首次判断时不触发任何指令
// OLED配置
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1 // 共用I2C复位
#define I2C_ADDRESS 0x3C // SH1106默认地址
// 创建对象
AHT20 aht20;
DFRobot_ENS160_I2C ENS160(&Wire, 0x53);
Adafruit_SH1106G display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
// 定义变量
int Temperature = 0;
int Humidity = 0;
int Intensity = 0;
// 上次更新时间
unsigned long lastUpdate = 0; // 记录上次更新时间
const unsigned long updateInterval = 500; // 0.5秒更新间隔
// 串口发送消息最大长度
#define UART_SEND_MAX 32
#define UART_MSG_HEAD_LEN 2
#define UART_MSG_FOOT_LEN 2
// 串口发送消息号
#define U_MSG_bozhensgshu 1
#define U_MSG_boxiaoshu 2
#define U_MSG_bobao1 3
#define U_MSG_bobao2 4
#define U_MSG_bobao3 5
#define U_MSG_bobao4 6
#define U_MSG_bobao5 7
#define U_MSG_bobao6 8
#define U_MSG_bobao7 9
#define U_MSG_bobao8 10
#define U_MSG_bobao9 11
#define U_MSG_bobao10 12
#define U_MSG_bobao11 13
#define U_MSG_bobao12 14
#define U_MSG_bobao13 15
#define U_MSG_bobao14 16
#define U_MSG_bobao15 17
#define U_MSG_bobao16 18
#define U_MSG_bobao17 19
#define U_MSG_bobao18 20
#define U_MSG_bobao19 21
#define U_MSG_bobao20 22
#define U_MSG_bobao21 23
// 串口消息参数类型
typedef union {
double d_double;
int d_int;
unsigned char d_ucs[8];
char d_char;
unsigned char d_uchar;
unsigned long d_long;
short d_short;
float d_float;}uart_param_t;
// 串口发送函数实现
void _uart_send_impl(unsigned char* buff, int len) {
// TODO: 调用项目实际的串口发送函数
for(int i=0;i<len;i++){
mySerial.write (*buff++);
}
}
// 串口通信消息尾
const unsigned char g_uart_send_foot[] = {
0x55, 0xaa
};
// 十六位整数转32位整数
void _int16_to_int32(uart_param_t* param) {
if (sizeof(int) >= 4)
return;
unsigned long value = param->d_long;
unsigned long sign = (value >> 15) & 1;
unsigned long v = value;
if (sign)
v = 0xFFFF0000 | value;
uart_param_t p; p.d_long = v;
param->d_ucs[0] = p.d_ucs[0];
param->d_ucs[1] = p.d_ucs[1];
param->d_ucs[2] = p.d_ucs[2];
param->d_ucs[3] = p.d_ucs[3];
}
// 浮点数转双精度
void _float_to_double(uart_param_t* param) {
if (sizeof(int) >= 4)
return;
unsigned long value = param->d_long;
unsigned long sign = value >> 31;
unsigned long M = value & 0x007FFFFF;
unsigned long e = ((value >> 23 ) & 0xFF) - 127 + 1023;
uart_param_t p0, p1;
p1.d_long = ((sign & 1) << 31) | ((e & 0x7FF) << 20) | (M >> 3);
param->d_ucs[0] = p0.d_ucs[0];
param->d_ucs[1] = p0.d_ucs[1];
param->d_ucs[2] = p0.d_ucs[2];
param->d_ucs[3] = p0.d_ucs[3];
param->d_ucs[4] = p1.d_ucs[0];
param->d_ucs[5] = p1.d_ucs[1];
param->d_ucs[6] = p1.d_ucs[2];
param->d_ucs[7] = p1.d_ucs[3];
}
// 串口通信消息头
const unsigned char g_uart_send_head[] = {
0xaa, 0x55
};
// 播报函数1
void _uart_bobao1() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao1;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报函数2
void _uart_bobao2() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao2;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报函数4
void _uart_bobao4() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao4;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报函数5
void _uart_bobao5() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao5;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报函数19
void _uart_bobao19() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao19;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报函数20
void _uart_bobao20() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao20;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报函数21
void _uart_bobao21() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao21;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报整数
void _uart_bozhensgshu(int zhengshu) {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bozhensgshu;
param.d_int = zhengshu;
_int16_to_int32(¶m);
buff[3] = param.d_ucs[0];
buff[4] = param.d_ucs[1];
buff[5] = 0;
buff[6] = 0;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 7] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 9);
}
void setup(){
Serial.begin(9600); // 硬件串口(与电脑通信)
mySerial.begin(9600); // 软件串口(与外设通信)
Wire.begin(); // 初始化I2C总线
// 初始化LED引脚
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW);
// 初始化步进电机的速度
myStepper.setSpeed(10);
pinMode(INA, OUTPUT);
pinMode(INB, OUTPUT);
// 调整旗帜的等待时间
stopMotor();
delay(3000);
myservo.attach(ServoPin); // 将引脚io23上的舵机连接到舵机对象上
myservo.write(90); // 舵机角度为90°
delay(1000); // 延时1s
#if defined(__AVR_ATtiny85__) && (F_CPU == 16000000)
clock_prescale_set(clock_div_1);
#endif
strip.begin(); // 初始化新像素条
strip.show(); // 关闭所有像素
strip.setBrightness(100); // 设置亮度(最大255)
// 初始化OLED
display.begin(I2C_ADDRESS, true);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(SH110X_WHITE);
// 初始化传感器
aht20.begin();
ENS160.begin();
ENS160.setPWRMode(ENS160_STANDARD_MODE);
}
void loop(){
// 非阻塞电机运行控制
if (motorRunning && (millis() - motorStartTime >= MOTOR_DURATION)) {
stopMotor();
motorRunning = false;
currentDirection = 0;
}
if (millis() - lastUpdate >= updateInterval) {
lastUpdate = millis();
Temperature = aht20.getTemperature(); // 直接从AHT20传感器读取温度数据
Humidity = aht20.getHumidity(); // 直接从AHT20传感器读取湿度数据
Intensity = analogRead(PhotoresistorPin); // 获取光敏电阻传感器检测的光照强度
uint8_t Status = ENS160.getENS160Status(); // 获取ENS160传感器工作状态
uint8_t AQI = ENS160.getAQI(); // 获取ENS160传感器检测的空气质量指数(1-5)
uint16_t TVOC = ENS160.getTVOC(); // 获取ENS160传感器检测的TVOC浓度(0-65000 ppb)
uint16_t ECO2 = ENS160.getECO2(); // 获取ENS160传感器检测的等效CO2浓度(400-65000 ppm)
// 精简的OLED显示更新
display.clearDisplay();
display.setTextSize(1);
display.setCursor(20, 0);
display.println("Voice-controlled");
display.setCursor(30, 20);
display.println("Smart School");
display.display();
if (mySerial.available() > 0) { // 持续检查软串口是否有来自语音模块的数据
Voice_Control = mySerial.read(); // 读取一个字节的数据
Serial.println(Voice_Control); // 将接收到的数据通过硬件串口输出,便于调试和监控
}
if (Voice_Control == 47) { // 判断接收到的指令数值47,并执行相应操作
delay(2 * 1000);
_uart_bobao1();
delay(2 * 1000);
_uart_bozhensgshu(Temperature); // 语音播报当前检测到的温度值
delay(2 * 1000);
_uart_bobao2();
delay(1 * 1000);
} else if (Voice_Control == 48) { // 判断接收到的指令数值48,并执行相应操作
delay(2 * 1000);
_uart_bobao4();
delay(2 * 1000);
_uart_bozhensgshu(Humidity); // 语音播报当前检测到的湿度值
delay(1 * 1000);
} else if (Voice_Control == 50) { // 判断接收到的指令数值50,并执行相应操作
delay(2 * 1000);
_uart_bobao5();
delay(2 * 1000);
_uart_bozhensgshu(Intensity); // 语音播报当前检测到的光照强度值
delay(1 * 1000);
} else if (Voice_Control == 65) { // 判断接收到的指令数值65,并执行相应操作
delay(4 * 1000);
_uart_bobao19();
delay(4 * 1000);
_uart_bozhensgshu(TVOC); // 语音播报当前检测到的总挥发性有机物浓度
delay(1 * 1000);
} else if (Voice_Control == 66) { // 判断接收到的指令数值66,并执行相应操作
delay(3 * 1000);
_uart_bobao20();
delay(3 * 1000);
_uart_bozhensgshu(ECO2); // 语音播报当前二氧化碳浓度
delay(1 * 1000);
} else if (Voice_Control == 67) { // 判断接收到的指令数值67,并执行相应操作
delay(3 * 1000);
_uart_bobao21();
delay(2 * 1000);
_uart_bozhensgshu(AQI); // 语音播报当前空气质量指数
delay(1 * 1000);
} else if (Voice_Control == 1) { // 接收到的数据(命令参数)为1, 并执行相应操作
digitalWrite(LED_PIN, HIGH); // 打开LED,灯点亮
} else if (Voice_Control == 2) { // 接收到的数据为2,并执行相应操作
digitalWrite(LED_PIN, LOW); // 关闭LED
} else if (Voice_Control == 21) { // 接收到的数据为21,并执行相应操作
buzzer.playTone(532, 250); // 蜂鸣器鸣叫
delay(100);
buzzer.playTone(0, 0); // 蜂鸣器不响
delay(100);
} else if (Voice_Control == 22) { // 接收到的数据为22,并执行相应操作
buzzer.playTone(0, 0);
} else if (Voice_Control == 59) { // 接收到的数据为59,并执行相应操作
myservo.write(180); // 舵机转动,开门
delay(1000);
} else if (Voice_Control == 60) { // 接收到的数据为60,并执行相应操作
myservo.write(90); // 舵机转动,关门
delay(1000);
} else if (Voice_Control == 62) { // 接收到的数据为62,并执行相应操作
startMotor(2); // 降旗
} else if (Voice_Control == 61) { // 接收到的数据为61,并执行相应操作
startMotor(1); // 升旗
} else if (Voice_Control == 63) { // 接收到的数据为63,并执行相应操作
myStepper.step(STEPS_PER_REV * 2); // 拉开窗帘
} else if (Voice_Control == 64) { // 接收到的数据为64,并执行相应操作
myStepper.step(STEPS_PER_REV * -2); // 关闭窗帘
} else if (Voice_Control == 11) { // 接收到的数据为11,并执行相应操作
birthday(); // 蜂鸣器播放音乐
} else if (Voice_Control == 12) { // 接收到的数据为12,并执行相应操作
buzzer.playTone(0, 0); // 蜂鸣器不响
} else if (Voice_Control == 13) { // 接收到的数据为13,并执行相应操作
colorWipe(strip.Color(255, 0, 0), 50); // SK6812 RGB灯亮红灯
} else if (Voice_Control == 14) { // 接收到的数据为14,并执行相应操作
colorWipe(strip.Color(0, 0, 0), 50); // SK6812 RGB灯熄灭
} else if (Voice_Control == 15) { // 接收到的数据为15,并执行相应操作
colorWipe(strip.Color(0, 255, 0), 50); // SK6812 RGB灯亮绿灯
} else if (Voice_Control == 16) { // 接收到的数据为16,并执行相应操作
colorWipe(strip.Color(0, 0, 0), 50);
} else if (Voice_Control == 17) { // 接收到的数据为17,并执行相应操作
colorWipe(strip.Color(0, 0, 255), 50); // SK6812 RGB灯亮蓝灯
} else if (Voice_Control == 18) { // 接收到的数据为18,并执行相应操作
colorWipe(strip.Color(0, 0, 0), 50);
}
// 清除指令,避免重复执行
Voice_Control = 0;
}
}
// 用一种颜色填充灯带
void colorWipe(uint32_t color, int wait) {
for(int i=0; i<strip.numPixels(); i++) {
strip.setPixelColor(i, color); // 设置像素颜色
strip.show(); // 更新灯带
delay(wait); // 暂停
}
}
void startMotor(int direction) {
stopMotor(); // 停止当前动作
if (direction == 1) {
analogWrite(INA, 150);
analogWrite(INB, 0);
} else if (direction == 2) {
analogWrite(INA, 0);
analogWrite(INB, 150);
}
motorRunning = true;
motorStartTime = millis();
currentDirection = direction;
}
void stopMotor() {
analogWrite(INA, 0);
analogWrite(INB, 0);
}
void birthday() {
// 演奏生日旋律 - 参数为(频率,持续时间)
buzzer.playTone(294, 250); // D4
buzzer.playTone(440, 250); // A4
buzzer.playTone(392, 250); // G4
buzzer.playTone(532, 250); // C5
buzzer.playTone(494, 250); // B4
buzzer.playTone(392, 250); // G4
buzzer.playTone(440, 250); // A4
buzzer.playTone(392, 250); // G4
buzzer.playTone(587, 250); // D5
buzzer.playTone(532, 250); // C5
buzzer.playTone(392, 250); // G4
buzzer.playTone(784, 250); // G5
buzzer.playTone(659, 250); // E5
buzzer.playTone(532, 250); // C5
buzzer.playTone(494, 250); // B4
buzzer.playTone(440, 250); // A4
buzzer.playTone(698, 250); // F5
buzzer.playTone(659, 250); // E5
buzzer.playTone(532, 250); // C5
buzzer.playTone(587, 250); // D5
buzzer.playTone(532, 500); // C5 - 长时
buzzer.playTone(0, 0); // 关闭蜂鸣器
}
15.4 实验结果#
外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击 按钮上传代码。代码上传成功后,OLED模块显示屏显示 “Voice-controlled Smart School”。
按钮上传代码。代码上传成功后,OLED模块显示屏显示 “Voice-controlled Smart School”。
首先,调整旗帜至下图所示位置:

然后,对着智能语音模块上的麦克风,使用唤醒词 “你好,小智” 或 “小智小智” 来唤醒智能语音模块,同时喇叭播放回复语 “有什么可以帮到您”;
对着麦克风说:“当前光照强度是多少” 或 “光照强度多少” 等命令词句时,接着语音播报 “正在为您读取光照强度” + “当前光照强度为” + “光敏传感器检测到的光照强度模拟值”;
智能语音模块唤醒后,对着麦克风说:“当前温度是多少” 或 “当前温度多少” 等命令词时,接着语音播报 “正在为您读取温度” + “当前温度为” + “AHT20温湿度传感器检测到的温度值” + “度”;
对着麦克风说:“当前湿度是多少” 或 “当前湿度多少” 等命令词时,接着语音播报 “正在为您读取湿度” + “当前湿度为百分之” + “AHT20温湿度传感器检测到的湿度值”;
对着麦克风说:“当前空气质量指数是多少” 等命令词时,接着语音播报 “正在为您读取空气质量指数” + “ENS160传感器模块检测到环境中的当前空气质量指数”;
对着麦克风说:“当前总挥发性有机物浓度是多少” 等命令词时,接着语音播报 “正在为您读取总挥发性有机物浓度” + “当前总挥发性有机物浓度为十亿分之” + “ENS160传感器模块检测到环境中的当前总挥发性有机物浓度值”;
对着麦克风说:“当前二氧化碳浓度是多少” 等命令词时,接着语音播报 “正在为您读取二氧化碳浓度” + “当前二氧化碳浓度为百万分之” + “ENS160传感器模块检测到环境中的当前总挥发性有机物浓度值”;
⚠️ 特别提醒:如果智能语音模块播报的空气质量指数(AQI)、总挥发性有机物浓度(TVOC)和二氧化碳浓度(eCO2)的数据都是0,请按一下ESP32主控板上的复位键,等待几秒钟。
对着麦克风说:“请开灯” 或 “开灯” 或 “打开灯” 或 “我回来了” 等命令词时,喇叭播放对应的回复语 “已为您打开照明”,同时路灯点亮;
对着麦克风说:“请关灯” 或 “关灯” 或 “关上灯” 或 “我出去了” 等命令词时,喇叭播放对应的回复语 “已为您关闭照明”,同时路灯熄灭;
对着麦克风说:“有人” 或 “有人靠近” 或 “有人过来” 等命令词时,喇叭播放对应的回复语 “是,有人正过来”,同时无源蜂鸣器响起来;
对着麦克风说:“无人” 或 “人远离” 等命令词时,喇叭播放对应的回复语 “是,没有人”,同时无源蜂鸣器不响;
对着麦克风说:“开门” 或 “打开门”等命令词时,喇叭播放对应的回复语 “已为您打开门”,同时校门打开;
对着麦克风说:“关门” 或 “关闭门” 等命令词时,喇叭播放对应的回复语 “已为您关闭门”,同时校门关闭;
对着麦克风说:“降旗” 或 “旗子下降” 等命令词时,喇叭播放对应的回复语 “已为您降旗”,旗帜下降;
对着麦克风说:“升旗” 或 “旗子上升” 等命令词时,喇叭播放对应的回复语 “已为您升旗”,同时旗帜上升。
对着麦克风说:“拉开窗帘” 或 “开窗帘” 等命令词时,喇叭播放对应的回复语 “已为您打开窗帘”,同时窗帘缓慢拉开;
对着麦克风说:“关闭窗帘” 或 “关窗帘” 等命令词时,喇叭播放对应的回复语 “已为您关闭窗帘”,同时窗帘缓慢关闭;
对着麦克风说 “播放音乐” 等命令词时,喇叭播放对应的回复语 “已为您播放音乐”,同时蜂鸣器播放音乐;
对着麦克风说:“关闭音乐” 等命令词时,喇叭播放对应的回复语 “已为您关闭音乐”,同时蜂鸣器不响;
对着麦克风说:“打开红灯” 等命令词时,喇叭播放对应的回复语 “已为您打开红灯”,同时SK6812 RGB灯亮红色灯;
对着麦克风说:“关闭红灯” 等命令词时,喇叭播放对应的回复语 “已为您关闭红灯”,同时SK6812 RGB灯熄灭;
对着麦克风说:“打开绿灯” 等命令词时,喇叭播放对应的回复语 “已为您打开绿灯”,同时SK6812 RGB灯亮绿色灯;
对着麦克风说:“关闭绿灯” 等命令词时,喇叭播放对应的回复语 “已为您关闭绿灯”,同时SK6812 RGB灯熄灭;
对着麦克风说:“打开蓝灯” 等命令词时,喇叭播放对应的回复语 “已为您打开蓝灯”,同时SK6812 RGB灯亮蓝色灯;
对着麦克风说:“关闭蓝灯” 等命令词时,喇叭播放对应的回复语 “已为您关闭蓝灯”,同时SK6812 RGB灯熄灭。