5.5 标签石头剪刀布#
5.5.1 简介#
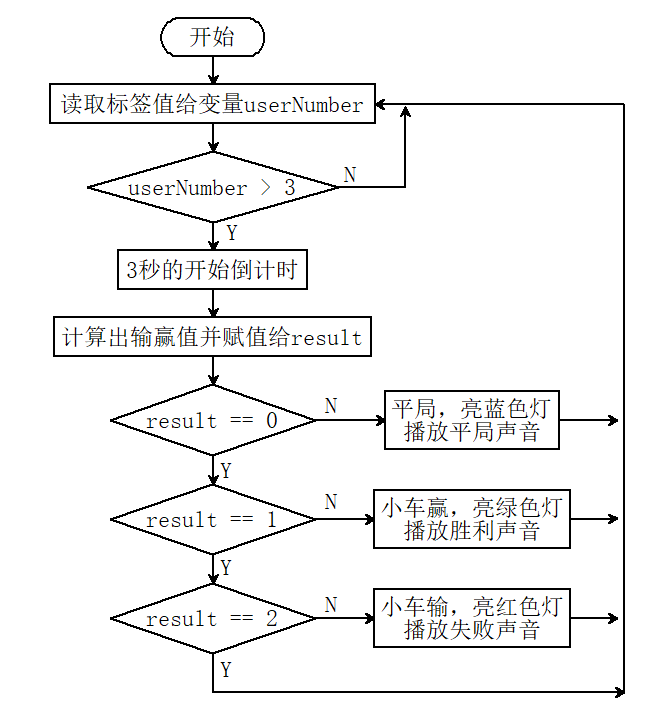
标签石头剪刀布,使用16h5标签的0(石头),1(剪刀),2(布)代表手势的石头剪刀布与小车进行输赢比赛,小车会随机生成0(石头),1(剪刀),2(布),如果小车赢了小车会发出胜利的声音并亮绿灯,如果小车输了小车会发出失败的声音并亮红灯,如果是平局则发出平局的声音并亮蓝灯。
5.5.2 流程图#
5.5.3 代码#
from machine import I2C,UART,Pin,PWM
from Sengo2 import *
import time
import random
from neopixel import myNeopixel
# 等待Sengo2完成操作系统的初始化。此等待时间不可去掉,避免出现Sengo2尚未初始化完毕主控器已经开发发送指令的情况
time.sleep(3)
# 选择UART或者I2C通讯模式,Sengo2出厂默认为I2C模式,短按模式按键可以切换
# 4种UART通讯模式:UART9600(标准协议指令),UART57600(标准协议指令),UART115200(标准协议指令),Simple9600(简单协议指令),
#########################################################################################################
# port = UART(2,rx=Pin(16),tx=Pin(17),baudrate=9600)
port = I2C(0,scl=Pin(21),sda=Pin(20),freq=400000)
# Sengo2通讯地址:0x60。如果I2C总线挂接多个设备,请避免出现地址冲突
sengo2 = Sengo2(0x60)
err = sengo2.begin(port)
print("sengo2.begin: 0x%x"% err)
# 选择编码格式,默认36H11。如果需要在程序运行过程中切换编码格式,请先关闭Apriltag算法,设置完毕编码格式后再开启算法
#sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily36H11)
#sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily25H9)
sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily16H5)
time.sleep(1)
# 1、Apriltag与二维码不同,请勿混淆。二者在使用时,周围一圈均需要留白;
# 2、sengo2可以同时运行多个算法,但有限制要求
# 3、Sengo系列产品参数与结果的编号都是从1开始;
# 4、正常使用时,应由主控器发送指令控制Sengo2算法的开启与关闭,而非通过摇杆手动进行操作;
err = sengo2.VisionBegin(sengo2_vision_e.kVisionAprilTag)
print("sengo2.VisionBegin(sengo2_vision_e.kVisionAprilTag):0x%x"% err)
#Initialize the passive buzzer
buzzer = PWM(Pin(12))
#Define the number of pin and LEDs connected to neopixel.
NUM_LEDS = 4
np = myNeopixel(NUM_LEDS, 13)
np.brightness(150) #brightness: 0 ~ 255
def tone(pin, frequency, duration):
"""播放指定频率的声音"""
if frequency > 0:
pin.freq(frequency)
pin.duty_u16(32768) # 50%占空比
time.sleep_ms(duration)
pin.duty_u16(0) # 停止声音
def no_tone(pin):
"""停止声音"""
pin.duty_u16(0)
def countdown(seconds):
"""倒计时音效"""
for i in range(seconds, 0, -1):
# 倒计时滴答声
tone(buzzer, 800, 100)
time.sleep_ms(200)
no_tone(buzzer)
# 间隔时间
time.sleep_ms(500)
def play_start_sound():
"""游戏开始音效"""
# 上升音阶+结束音
tones = [
(523, 100), # C5
(659, 100), # E5
(784, 100), # G5
(1046, 300) # C6高音
]
for freq, dur in tones:
tone(buzzer, freq, dur)
time.sleep_ms(120) # 音符间隔
no_tone(buzzer)
time.sleep_ms(350)
def victory_sound():
"""胜利音效"""
tones = [
(587, 150), # D5
(784, 100), # G5
(1046, 200) # C6
]
delays = [200, 120, 250]
for (freq, dur), dly in zip(tones, delays):
tone(buzzer, freq, dur)
time.sleep_ms(dly)
no_tone(buzzer)
def defeat_sound():
"""失败音效"""
tones = [
(220, 400), # A3
(196, 600) # G3
]
delays = [500, 700]
for (freq, dur), dly in zip(tones, delays):
tone(buzzer, freq, dur)
time.sleep_ms(dly)
no_tone(buzzer)
def draw_sound():
"""平局音效"""
for _ in range(3):
tone(buzzer, 349, 80) # F4
time.sleep_ms(100)
tone(buzzer, 330, 80) # E4
time.sleep_ms(100)
no_tone(buzzer)
gesture = ["石头","剪刀","布 "]
while True:
# Sengo2不主动返回检测识别结果,需要主控板发送指令进行读取。读取的流程:首先读取识别结果的数量,接收到指令后,Sengo2会刷新结果数据,如果结果数量不为零,那么主控再发送指令读取结果的相关信息。请务必按此流程构建程序。
obj_num = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kStatus)
#随机生成0-2之间的数
randomNumber = random.randint(0,2)
if obj_num:
#获取标签编号
userNumber = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kLabel, 1)
if userNumber < 3:
np.fill(0,0,0)
np.show()
result = (userNumber - randomNumber + 3) % 3
countdown(3)
play_start_sound()
print(f"机器人:{gesture[randomNumber]} 人:{gesture[userNumber]} 机器人说:",end='')
if result == 0:
print("平局")
draw_sound()
np.fill(0,0,255)
elif result == 1:
print("我赢了")
np.fill(0,255,0)
victory_sound()
elif result == 2:
print("我输了")
np.fill(255,0,0)
defeat_sound()
#刷新显示
np.show()
# 关闭PWM
buzzer.deinit()
5.5.4 代码结果#
上传代码成功后,AI视觉模块会对拍到的画面进行识别,判断是否有16h5类型的标签,如果有则将标签值传输给开发板。我们可以随机将标签值为“0,1,2”的卡片放到摄像头识别区与小车进行猜拳,如果是平局小车会亮蓝色灯并发出平局的音效,如果是小车赢了那么小车会亮绿灯并发出胜利了的音效,如果是小车输了那么小车会亮红灯并发出失败了的音效。