5.2 交通卡片控制小车#
5.2.1 简介#
交通卡片控制小车,卡片有前进,左转,右转,掉头,停止,速度40,速度60,速度80,红灯,绿灯,AI视觉模块进行识别交通卡片,通过对应的卡片使小车进行相应的动作。
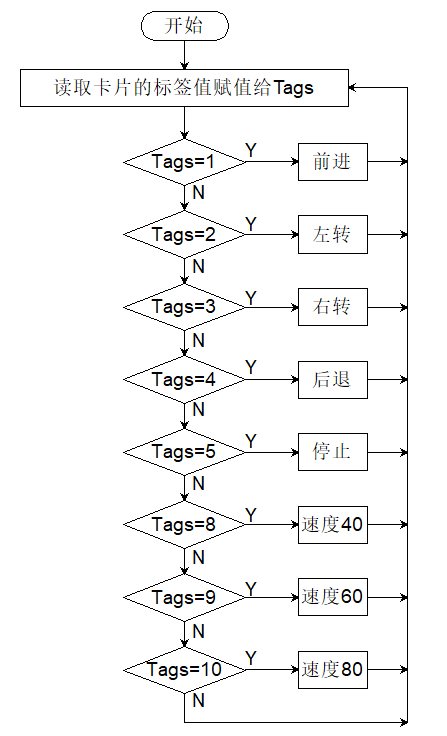
5.2.2 流程图#
5.2.3 代码#
#include <Arduino.h> // Arduino核心库
#include <Sentry.h> // Sentry机器视觉传感器库
// 为Sengo2类型创建别名"Sengo",简化后续使用
typedef Sengo2 Sengo;
// 定义通信方式(当前启用I2C)
#define SENGO_I2C
// #define SENGO_UART // UART串口通信方案(已注释禁用)
// 根据选择的通信方式包含相应库
#ifdef SENGO_I2C
#include <Wire.h> // I2C通信所需库
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // 软串口库
#define TX_PIN 11 // 自定义TX引脚号
#define RX_PIN 10 // 自定义RX引脚号
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 创建软串口对象
#endif
#define ML 4
#define ML_PWM 6
#define MR 2
#define MR_PWM 5
#define BUZZER_PIN 3
int left_speed = 255;
int right_speed = 255;
int Tags = 0;
// 定义视觉处理类型为卡片识别模式
#define VISION_TYPE Sengo::kVisionCard
// 创建Sengo传感器对象实例
Sengo sengo;
// 卡片类型名称映射表(索引对应卡片标签值)
const char* card_classes[] = {
"unknown", // 0: 未知卡片类型
"forward", // 1: 前进卡片
"left", // 2: 左转卡片
"right", // 3: 右转卡片
"turn_around", // 4: 掉头卡片
"park", // 5: 停车卡片
// 注意:数组大小应与实际卡片类型数量匹配
};
void setup() {
sentry_err_t err = SENTRY_OK; // 定义错误状态变量,初始化为无错误
Serial.begin(9600); // 初始化串口通信,波特率9600
Serial.println("Waiting for sengo initialize..."); // 打印初始化提示
// 根据选择的通信方式初始化传感器
#ifdef SENGO_I2C
Wire.begin(); // 初始化I2C总线
// 循环尝试连接传感器,直到成功
while (SENTRY_OK != sengo.begin(&Wire)) {
yield(); // 在等待连接期间允许系统处理其他任务
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // 初始化软串口,波特率9600
// 循环尝试连接传感器,直到成功
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield(); // 在等待连接期间允许系统处理其他任务
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // 打印传感器初始化成功信息
// 启动卡片视觉识别功能
err = sengo.VisionBegin(VISION_TYPE);
// 打印视觉识别初始化结果
Serial.print("sengo.VisionBegin(kVisionCard) ");
if (err) {
Serial.print("Error: 0x"); // 如果出错,打印错误前缀
} else {
Serial.print("Success: 0x"); // 如果成功,打印成功前缀
}
Serial.println(err, HEX); // 以16进制格式打印错误代码
pinMode(ML, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(ML_PWM, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(MR, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(MR_PWM, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(BUZZER_PIN, OUTPUT);
}
void loop() {
// 获取检测到的卡片数量(kStatus参数返回检测到的对象总数)
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
// 如果检测到至少一张卡片
if (obj_num > 0) {
// 遍历所有检测到的卡片
for (int i = 1; i <= obj_num; ++i) {
// 获取卡片类型标签(对应card_classes数组索引)
Tags = sengo.GetValue(VISION_TYPE, kLabel, i);
// 打印卡片详细信息
Serial.print(" Tags:");
Serial.println(Tags);
}
switch (Tags) {
case 1: car_forward(); break;
case 2: car_left(); break;
case 3: car_right(); break;
case 4: car_back(); break;
case 5: car_stop(); break;
case 8: speed_40(); break;
case 9: speed_60(); break;
case 10: speed_80(); break;
}
} else {
car_stop();
}
delay(200);
}
//设置小车速度为全速的40%
void speed_40() {
buzzer_play(102);
left_speed = 255 * 0.4;
right_speed = 255 * 0.4;
}
//设置小车速度为全速的60%
void speed_60() {
buzzer_play(153);
left_speed = 255 * 0.6;
right_speed = 255 * 0.6;
}
//设置小车速度为全速的80%
void speed_80() {
buzzer_play(204);
left_speed = 255 * 0.8;
right_speed = 255 * 0.8;
}
void buzzer_play(int speed) {
if (left_speed != speed) {
// 播放短促的"哔"声
tone(BUZZER_PIN, 1000, 100); // 1000Hz频率,持续100ms
delay(100);
noTone(BUZZER_PIN);
}
}
//小车前进代码
void car_forward() {
digitalWrite(ML, LOW);
analogWrite(ML_PWM, left_speed);
digitalWrite(MR, LOW);
analogWrite(MR_PWM, right_speed);
}
//小车后退代码
void car_back() {
digitalWrite(ML, HIGH);
analogWrite(ML_PWM, (255 - left_speed));
digitalWrite(MR, HIGH);
analogWrite(MR_PWM, (255 - right_speed));
}
//小车左转代码
void car_left() {
digitalWrite(ML, HIGH);
analogWrite(ML_PWM, 127);
digitalWrite(MR, LOW);
analogWrite(MR_PWM, 127);
}
//小车右转代码
void car_right() {
digitalWrite(ML, LOW);
analogWrite(ML_PWM, 127);
digitalWrite(MR, HIGH);
analogWrite(MR_PWM, 127);
}
//小车停止代码
void car_stop() {
digitalWrite(ML, LOW);
analogWrite(ML_PWM, 0);
digitalWrite(MR, LOW);
analogWrite(MR_PWM, 0);
}
5.2.4 代码结果#
上传代码成功后,AI视觉模块会对拍到的画面进行识别,判断是否有交通卡片,如果有则想卡片的标签值赋值到变量Tags,通过对变量Tags的值进行判断,Tags = 1 小车前进,Tags = 2 小车左转 ,Tags = 3 小车右转 ,Tags = 4 小车后退 ,Tags = 5 小车停止 ,Tags = 8 小车速度设置为全速(255)的40% , Tags = 9 小车速度设置为全速(255)的60% ,Tags = 10 小车速度设置为全速(255)的80%。(注意:只有要设置的速度与当前速度不一致时才会发出“滴”的声音)