5.2 交通卡片控制小车#
5.2.1 简介#
交通卡片控制小车,卡片有前进,左转,右转,掉头,停止,速度40,速度60,速度80,红灯,绿灯,AI视觉模块进行识别交通卡片,通过对应的卡片使小车进行相应的动作。
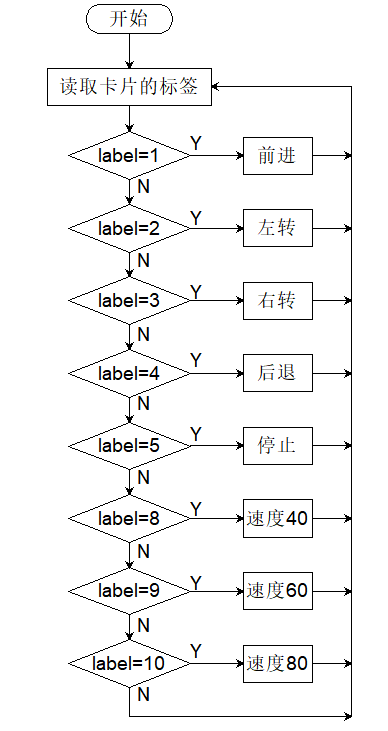
5.2.2 流程图#
5.2.3 代码#
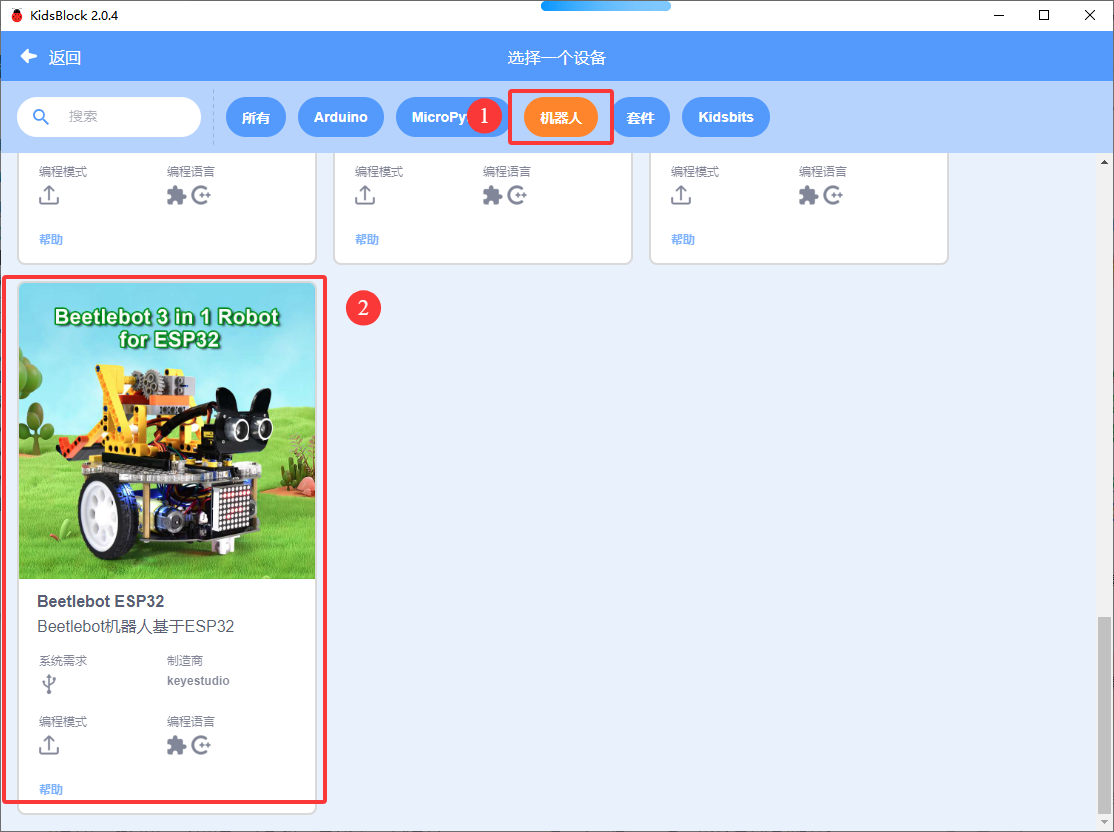
如果你选择自己搭建代码,请选择小车的专用开发模块,因为我们要使用AI视觉模块与小车进行互动就会用到小车功能模块代码,添加小车专业的开发模块就能直接使用无需再次添加了。
1.在代码启动中添加设置AI视觉模块的通信方式为I2C,再设置AI视觉模块运行卡片识别模式,再定义两个全局的int类型变量,分别命名为left_speed,right_speed

2.使用判断模块对检测数量进行判断,只有检测数量大于0时才进行数据的读取,注意功能选择的是卡片识别;

3.使用判断模块对读取到的卡片的标签进行判断,通过集成教程中的标签对照表可以找到每个卡片对应的标签值,比如:标签=1是前进卡片,标签= 2是左转卡片,标签= 3 是右转卡片 ,标签= 4是掉头卡片(后退)等等,我们就使用判断模块对 label进行判断就能知道识别到哪个卡片,然后小车在执行对应的动作。
如下图是识别到前进卡片的小车前进的代码:

如下图是识别到后退卡片的小车后退的代码:

此时你会注意到后退的代码电机的速度用255做了减法,这是因为小车后退时255是反正是最低速度而0是最高速度刚好与小车前进的速度值相反,所以我们做了减法设置(你也可以调节速度与小车前进后退进行测试,你将很直观的发现这一现象)
4.设置速度的代码则是将变量left_speed与right_speed进行乘法运算,我们有速度40,60,80,那么我们就将识别到40速度卡片时分将变量left_speed与right_speed设置为它自身的0.4(也就是乘以0.4),速度60则是乘以0.6,速度80则是乘以0.8,使用蜂鸣器模块将设置速度时发出滴滴的声音
如下图是识别到速度80卡片时的代码:

完整代码:

5.2.4 代码结果#
上传代码成功后,AI视觉模块会对拍到的画面进行识别,判断是否有交通卡片,如果有则想卡片的标签值赋值到变量Tags,通过对变量Tags的值进行判断,label= 1 小车前进,label= 2 小车左转 ,label= 3 小车右转 ,label= 4 小车后退 ,label= 5 小车停止 ,label= 8 小车速度设置为全速(255)的40% , label= 9 小车速度设置为全速(255)的60% ,label= 10 小车速度设置为全速(255)的80%。