5.3 色块追踪小车#
5.3.1 简介#
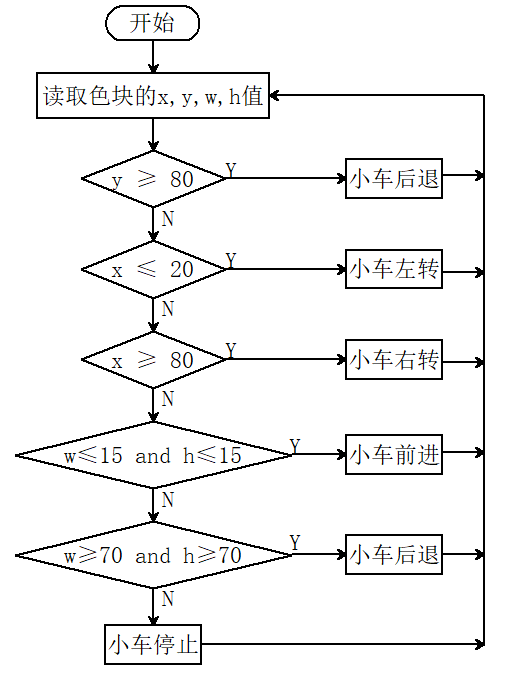
色块追踪小车,AI视觉模块对色块进行锁定并且根据AI视觉模块给出的色块XY以及宽高进行左右前后的跟踪。
5.3.2 流程图#
5.3.3 代码#
#include <Arduino.h>
#include <Sentry.h>
typedef Sengo2 Sengo;
#define SENGO_I2C
// #define SENGO_UART
#ifdef SENGO_I2C
#include <Wire.h>
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h>
#define TX_PIN 11
#define RX_PIN 10
SoftwareSerial mySerial(RX_PIN, TX_PIN);
#endif
#define VISION_TYPE Sengo::kVisionBlob
Sengo sengo;
const char* blob_classes[] = {
"UNKNOWN", "BLACK", "WHITE", "RED", "GREEN", "BLUE", "YELLOW"
};
int x, y, w, h;
#define ML 4
#define ML_PWM 6
#define MR 2
#define MR_PWM 5
void setup() {
sentry_err_t err = SENTRY_OK;
Serial.begin(9600);
Serial.println("Waiting for sengo initialize...");
#ifdef SENGO_I2C
Wire.begin();
while (SENTRY_OK != sengo.begin(&Wire)) { yield(); }
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600);
while (SENTRY_OK != sengo.begin(&mySerial)) { yield(); }
#endif // SENGO_UART
Serial.println("Sengo begin Success.");
sengo.SetParamNum(VISION_TYPE, 1);
sentry_object_t param = { 0 };
/* Set minimum blob size(pixel) */
param.width = 5;
param.height = 5;
/* Set blob1 color */
param.label = Sengo::kColorRed;
err = sengo.SetParam(VISION_TYPE, ¶m, 1);
Serial.print("sengo.SetParam[");
Serial.print(blob_classes[param.label]);
if (err) {
Serial.print("] Error: 0x");
} else {
Serial.print("] Success: 0x");
}
Serial.println(err, HEX);
/* Set per blob max number */
err = sengo.VisionSetMode(VISION_TYPE, 1);
Serial.print("sengo.VisionSetMode");
if (err) {
Serial.print(" Error: 0x");
} else {
Serial.print(" Success: 0x");
}
Serial.println(err, HEX);
err = sengo.VisionBegin(VISION_TYPE);
Serial.print("sengo.VisionBegin(kVisionBlob) ");
if (err) {
Serial.print("Error: 0x");
} else {
Serial.print("Success: 0x");
}
Serial.println(err, HEX);
pinMode(ML, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(ML_PWM, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(MR, OUTPUT); //设置左电机方向控制引脚为输出
pinMode(MR_PWM, OUTPUT); //设置左电机方向控制引脚为输出
}
void loop() {
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
if (obj_num) {
for (int i = 1; i <= obj_num; ++i) {
x = sengo.GetValue(VISION_TYPE, kXValue, i);
y = sengo.GetValue(VISION_TYPE, kYValue, i);
w = sengo.GetValue(VISION_TYPE, kWidthValue, i);
h = sengo.GetValue(VISION_TYPE, kHeightValue, i);
}
if (y >= 80) {
//小车后退
car_back();
} else if (x <= 20) {
//小车左转
car_left();
} else if (x >= 80) {
//小车右转
car_right();
} else if (w <= 15 && h <= 15) {
car_forward();
} else if (w >= 70 && h >= 70) {
car_back();
} else {
car_stop();
}
} else {
car_stop();
}
}
//小车前进代码
void car_forward() {
digitalWrite(ML, LOW);
analogWrite(ML_PWM, 100);
digitalWrite(MR, LOW);
analogWrite(MR_PWM, 100);
}
//小车后退代码
void car_back() {
digitalWrite(ML, HIGH);
analogWrite(ML_PWM, 150);
digitalWrite(MR, HIGH);
analogWrite(MR_PWM, 150);
}
//小车左转代码
void car_left() {
digitalWrite(ML, HIGH);
analogWrite(ML_PWM, 165);
digitalWrite(MR, LOW);
analogWrite(MR_PWM, 90);
}
//小车右转代码
void car_right() {
digitalWrite(ML, LOW);
analogWrite(ML_PWM, 90);
digitalWrite(MR, HIGH);
analogWrite(MR_PWM, 165);
}
//小车停止代码
void car_stop() {
digitalWrite(ML, LOW);
analogWrite(ML_PWM, 0);
digitalWrite(MR, LOW);
analogWrite(MR_PWM, 0);
}
5.3.4 代码结果#
上传代码成功后,AI视觉模块会对拍到的画面进行识别,判断是否有红色块,如果有红色块便从这个色块的x,y,w,h值上判断小车的动作,比如红色块靠显示屏的右边小车便往右边转动,红色快靠左小车就往左边转到,红色快靠下小车就后退。(使用我们提供的颜色卡片)