5.6 智能投石车#
5.6.1 简介#
使用AI视觉模块搭配小车的投石攻城车造型,制作出有趣的自动识别投石器,先将AI视觉模块固定到投石器小车上,然后使用AI模块进行识别如果识别到了瓶子就蜂鸣器开始倒计时3声然后投掷,投掷结束后缓慢落下投掷臂等待下一次识别到瓶子后投掷。
5.6.2 将AI模块安装到投石小车上#
注意:你需要先按照小车教程将`投石攻城车`的乐高搭建好,然后再按照下方的安装教程进行安装。
所需配件
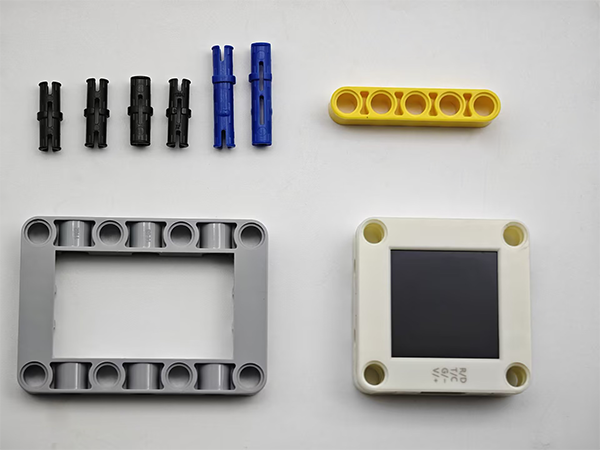
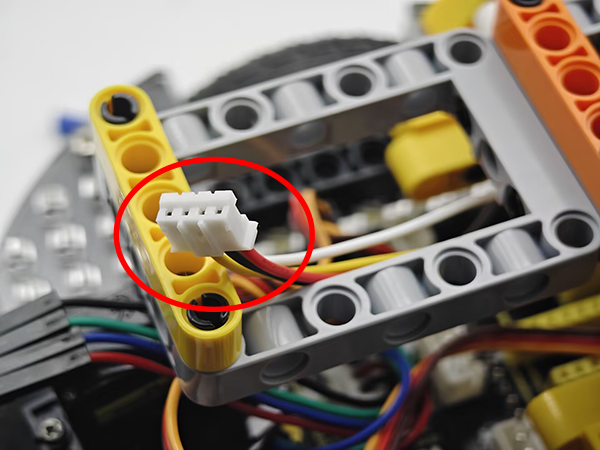
步骤1:
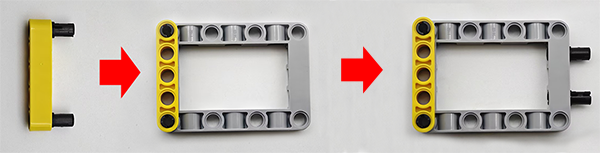
步骤2:
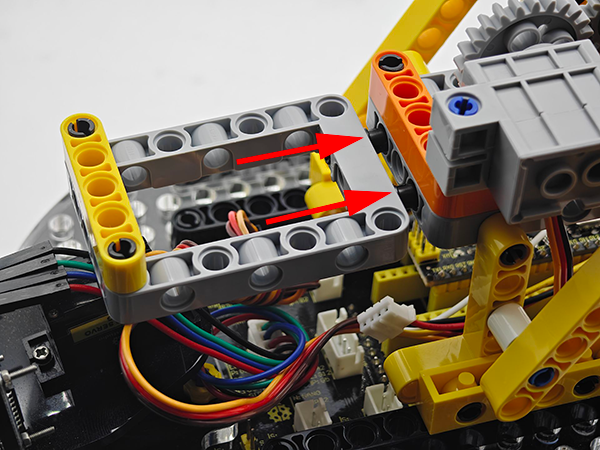
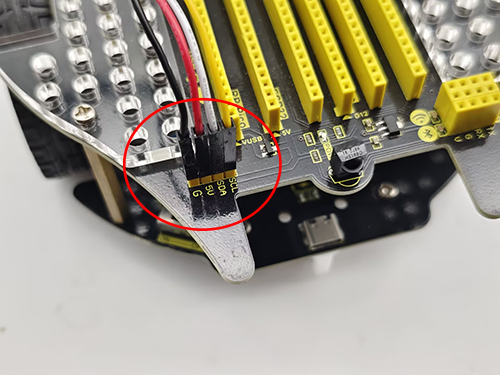
步骤3:
步骤4:
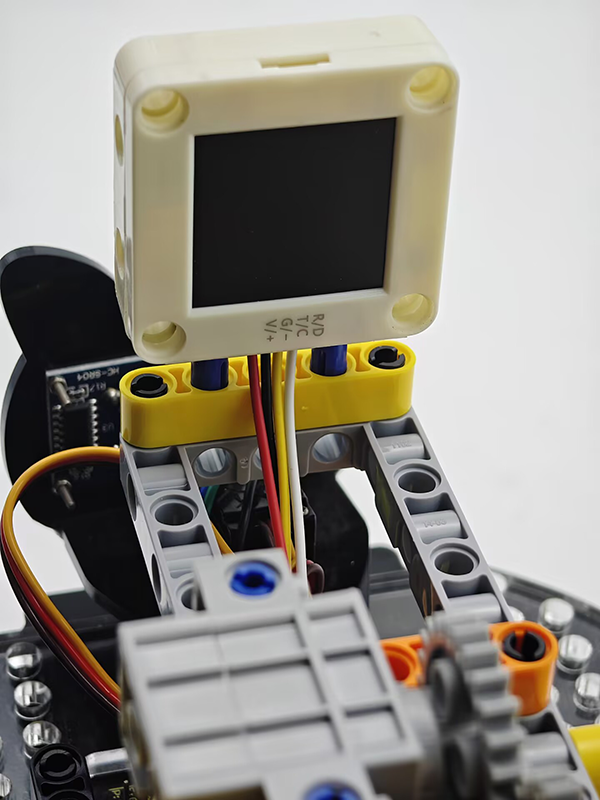
AI视觉模块 |
小车接口 |
|---|---|
T/C (黄色线) |
SCL |
R/D (白色线) |
SDA |
V/+ (红色线) |
5V |
G/- (黑色线) |
G |
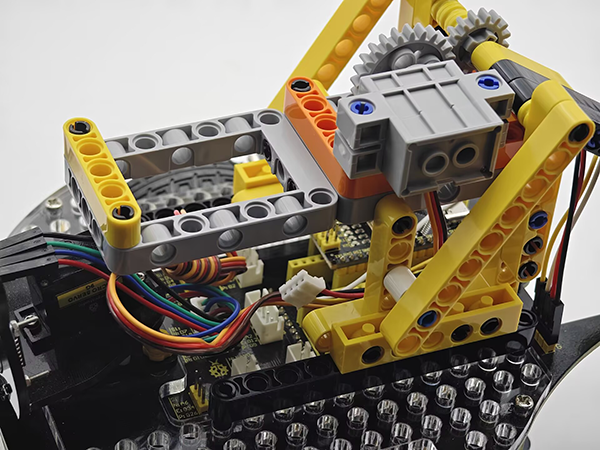
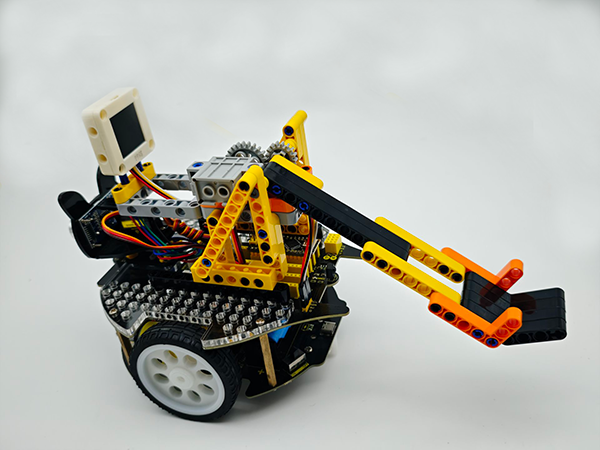
完整展示:
5.6.3 流程图#
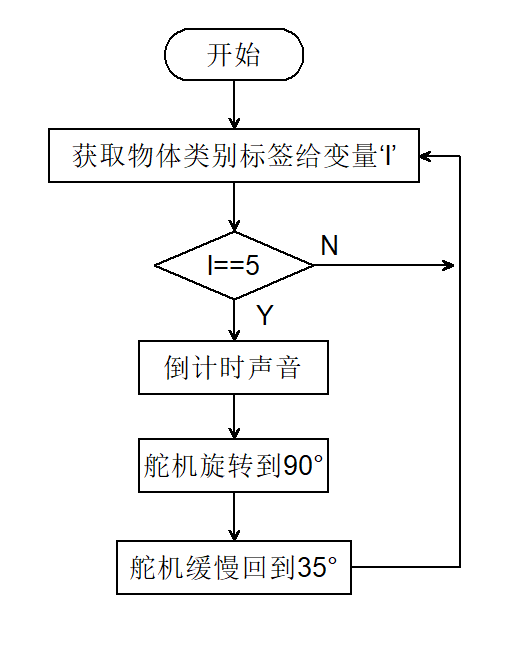
5.6.4 代码#
// 引入 Arduino 核心库
#include <Arduino.h>
// 引入 Sentry 视觉传感器库
#include <Sentry.h>
//引入 Servo 舵机控制库
#include <Servo.h>
Servo servo; //创建伺服对象以控制伺服系统
#define BUZZER_PIN 3 //蜂鸣器引脚
// 定义 Sengo2 类型的别名(简化使用)
typedef Sengo2 Sengo;
// 选择通信方式(当前启用 I2C)
#define SENGO_I2C
// #define SENGO_UART // UART 方式被注释掉
// 根据选择的通信方式包含相应库
#ifdef SENGO_I2C
#include <Wire.h> // I2C 通信库
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h>
#define TX_PIN 11 // 软件串口发送引脚
#define RX_PIN 10 // 软件串口接收引脚
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 创建软件串口对象
#endif
// 设置视觉识别类型为 20 类物体识别
#define VISION_TYPE Sengo::kVision20Classes
Sengo sengo; // 创建 Sentry 传感器对象
// 全局状态变量
unsigned long lastDetectionTime = 0; // 最后检测到瓶子的时间戳
const unsigned long disappearDelay = 2000; // 投掷间歇时间
bool currentBottleDetected = false; // 是否检测到瓶子
// 初始化设置(Arduino 启动时执行一次)
void setup() {
sentry_err_t err = SENTRY_OK; // 错误状态变量
Serial.begin(9600); // 初始化串口通信(用于调试输出)
Serial.println("Waiting for sengo initialize...");
// I2C 初始化流程
#ifdef SENGO_I2C
Wire.begin(); // 初始化 I2C 总线
// 循环等待传感器初始化成功
while (SENTRY_OK != sengo.begin(&Wire)) {
yield(); // 在等待期间让出 CPU 控制权
}
#endif
// UART 初始化流程(当前未启用)
#ifdef SENGO_UART
mySerial.begin(9600);
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif
Serial.println("Sengo begin Success.");
// 启动视觉识别功能(20 类物体检测)
err = sengo.VisionBegin(VISION_TYPE);
// 打印初始化结果
Serial.print("sengo.VisionBegin(kVision20Classes) ");
if (err) {
Serial.print("Error: 0x");
} else {
Serial.print("Success: 0x");
}
Serial.println(err, HEX); // 十六进制输出错误码
servo.attach(A0);
servo.write(35);
pinMode(BUZZER_PIN,OUTPUT);
}
// 主循环(重复执行)
void loop() {
// 获取检测到的物体数量(kStatus 表示查询状态)
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
unsigned long currentMillis = millis();
if (obj_num) { // 如果检测到物体
Serial.print("Totally ");
Serial.print(obj_num);
Serial.println(" objects");
// 遍历所有检测到的物体
for (int i = 1; i <= obj_num; ++i) {
// 获取物体类别标签
int l = sengo.GetValue(VISION_TYPE, kLabel, i); // 物体类别标签索引
if(l == 5 && !currentBottleDetected){
lastDetectionTime = currentMillis; // 更新最后检测时间
//投掷倒计时声音
countdown(3);
//投掷
servo.write(90);
delay(1000);
//缓慢回落
for(int j = 90;j > 35;j--){
servo.write(j);
delay(15);
}
// servo.write(35);
delay(500);
}
}
}
if((currentMillis - lastDetectionTime) > disappearDelay){
currentBottleDetected = false;
}
}
void countdown(int seconds) {
for (int i = seconds; i > 0; i--) {
// 倒计时滴答声
tone(BUZZER_PIN, 800, 100);
delay(200);
noTone(BUZZER_PIN);
// 间隔时间
delay(800);
}
}
5.6.5 代码结果#
上传代码成功后,AI视觉模块会开启“20类物体”模式然后对拍到的画面进行识别,判断是否有检测到瓶子,如果有则进行投掷,投掷前会有三声倒计时提示音倒计时结束就会进行投掷,投掷完成后投掷臂会慢慢的回落等待下一次投掷。