5.5 标签石头剪刀布#
5.5.1 简介#
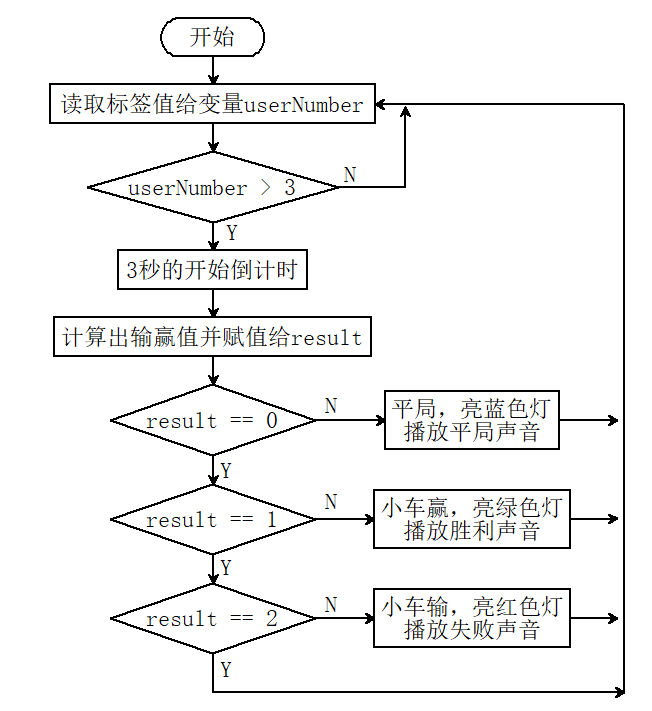
标签石头剪刀布,使用16h5标签的0(石头),1(剪刀),2(布)代表手势的石头剪刀布与小车进行输赢比赛,小车会随机生成0(石头),1(剪刀),2(布),如果小车赢了小车会发出胜利的声音并亮绿灯,如果小车输了小车会发出失败的声音并亮红灯,如果是平局则发出平局的声音并亮蓝灯。
5.5.2 流程图#
5.5.3 代码#
#include <Arduino.h>
#include <Sentry.h>
#include <Adafruit_NeoPixel.h>
#define PIN A3
Adafruit_NeoPixel strip = Adafruit_NeoPixel(4, PIN, NEO_GRB + NEO_KHZ800);
typedef Sengo2 Sengo;
#define SENGO_I2C
// #define SENGO_UART
#ifdef SENGO_I2C
#include <Wire.h>
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h>
#define TX_PIN 11
#define RX_PIN 10
SoftwareSerial mySerial(RX_PIN, TX_PIN);
#endif
#define VISION_TYPE Sengo::kVisionAprilTag
Sengo sengo;
#define BUZZER_PIN 3
int left_speed = 255;
int right_speed = 255;
String gesture[3] = { "石头", "剪刀", "布" };
void setup() {
sentry_err_t err = SENTRY_OK;
Serial.begin(9600);
Serial.println("Waiting for sengo initialize...");
#ifdef SENGO_I2C
Wire.begin();
while (SENTRY_OK != sengo.begin(&Wire)) {
yield();
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600);
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success.");
err = sengo.VisionSetMode(VISION_TYPE, Sengo::kVisionModeFamily16H5);
err = sengo.VisionSetLevel(VISION_TYPE, kLevelSpeed);
if (err) {
Serial.print("sengo.VisionSetMode Error: 0x");
Serial.println(err, HEX);
}
err = sengo.VisionBegin(VISION_TYPE);
Serial.print("sengo.VisionBegin(kVisionAprilTag) ");
if (err) {
Serial.print("Error: 0x");
} else {
Serial.print("Success: 0x");
}
Serial.println(err, HEX);
pinMode(BUZZER_PIN, OUTPUT);
strip.begin();
strip.show(); // Initialize all pixels to 'off'
}
void loop() {
int randomNumber = random(3); //随机生成0,1,2数字
int result = 0;
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
if (obj_num) {
for (int i = 1; i <= obj_num; ++i) {
int userNumber = sengo.GetValue(VISION_TYPE, kLabel, i);
if (userNumber < 3) {
countdown(2);
playStartSound();
result = (userNumber - randomNumber + 3) % 3;
Serial.print("机器人出:");
Serial.print(gesture[randomNumber]);
Serial.print(" 人出:");
Serial.print(gesture[userNumber]);
Serial.print(" 机器人说:");
if (result == 0) {
Serial.println("平局");
drawSound();
colorWipe(strip.Color(0, 0, 255), 50); // 亮蓝灯
} else if (result == 1) {
Serial.println("我赢了!");
victorySound();
colorWipe(strip.Color(0, 255, 0), 50); // 亮绿灯
} else if (result == 2) {
Serial.println("我输了!");
defeatSound();
colorWipe(strip.Color(255, 0, 0), 50); // 亮红灯
}
} else {
break;
}
}
}
}
// Fill the dots one after the other with a color
void colorWipe(uint32_t c, uint8_t wait) {
for (uint16_t i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
}
void countdown(int seconds) {
for (int i = seconds; i > 0; i--) {
// 倒计时滴答声
tone(BUZZER_PIN, 800, 100);
delay(200);
noTone(BUZZER_PIN);
// 间隔时间
delay(800);
}
}
void playStartSound() {
// 游戏开始音效 - 上升音阶+结束音
tone(BUZZER_PIN, 523, 100); // C5
delay(120);
tone(BUZZER_PIN, 659, 100); // E5
delay(120);
tone(BUZZER_PIN, 784, 100); // G5
delay(120);
tone(BUZZER_PIN, 1046, 300); // C6高音
delay(350);
noTone(BUZZER_PIN);
}
void victorySound() {
// 胜利:轻快节奏(哒-哒哒)
tone(BUZZER_PIN, 587, 150); // D5
delay(200);
tone(BUZZER_PIN, 784, 100); // G5
delay(120);
tone(BUZZER_PIN, 1046, 200); // C6
delay(250);
noTone(BUZZER_PIN);
}
void defeatSound() {
// 失败:缓慢双低音(嘟...嘟...)
tone(BUZZER_PIN, 220, 400); // A3
delay(500);
tone(BUZZER_PIN, 196, 600); // G3
delay(700);
noTone(BUZZER_PIN);
}
void drawSound() {
// 平局:平稳颤音
for (int i = 0; i < 3; i++) {
tone(BUZZER_PIN, 349, 80); // F4
delay(100);
tone(BUZZER_PIN, 330, 80); // E4
delay(100);
}
noTone(BUZZER_PIN);
}
5.5.4 代码结果#
上传代码成功后,AI视觉模块会对拍到的画面进行识别,判断是否有16h5类型的标签,如果有则将标签值传输给开发板。我们可以随机将标签值为“0,1,2”的卡片放到摄像头识别区与小车进行猜拳,如果是平局小车会亮蓝色灯并发出平局的音效,如果是小车赢了那么小车会亮绿灯并发出胜利了的音效,如果是小车输了那么小车会亮红灯并发出失败了的音效。