Sengo2 AI视觉图卡创客扩展包#
1、产品简介:#
Sengo2 AI视觉图卡创客扩展包(3合1小车)是一款专为创客教育设计的带智能视觉模块的智能小车套件,完美兼容乐高积木结构与Arduino生态。视觉模块集成多核AI处理器,支持颜色识别、标签码追踪、人脸检测、实时深度学习等10种机器视觉功能。通过即插即用式硬件接口以及开源项目,学生可快速搭建视觉驱动的小车、机械臂等智能项目,从图形化编程轻松过渡到Python/Arduino代码开发,是培养AI思维与工程能力的理想教具。
特点:
乐高生态融合
模块化卡扣设计,直接嵌入乐高机械结构
10种视觉识别功能
颜色识别,色块检测,标签识别,线条检测,深度学习,卡片识别,人脸识别,20类物体识别,二维码识别,运动物体检测
多种编程开发
KidsBlock图形化编程(中小学生适用)+ Arduino/C++/MicroPython代码层(高中生/大学)
兼容性强
兼容Arduino UNO,Arduino Nano,ESP32,Pico等开发板
自主训练AI识别
支持模型训练,学生可自主训练专属识别模型(如垃圾分类识别)
2、清单:#
序号 |
名称 |
数量 |
图片 |
|---|---|---|---|
1 |
AI视觉模块 |
1 |
|
2 |
连接线 |
1 |
|
3 |
乐高 标准栓 黑色 |
6 |
|
4 |
乐高 1x3摩擦销 蓝色 |
4 |
|
5 |
乐高 1x11梁 |
2 |
|
6 |
乐高 1*9梁 |
2 |
|
7 |
Apriltag卡片 ID:0 |
1 |
|
8 |
Apriltag卡片 ID:1 |
1 |
|
9 |
Apriltag卡片 ID:2 |
1 |
|
10 |
Apriltag卡片 ID:3 |
1 |
|
11 |
Apriltag卡片 ID:4 |
1 |
|
12 |
红色卡片 |
1 |
|
13 |
绿色卡片 |
1 |
|
14 |
蓝色卡片 |
1 |
|
15 |
黑色卡片 |
1 |
|
16 |
白色卡片 |
1 |
|
17 |
二维码 Red |
1 |
|
18 |
二维码 Green |
1 |
|
19 |
二维码 Blue |
1 |
|
20 |
二维码 Black |
1 |
|
21 |
二维码 White |
1 |
|
22 |
交通卡 前进 |
1 |
|
23 |
交通卡 左转 |
1 |
|
24 |
交通卡 右转 |
1 |
|
25 |
交通拉 掉头 |
1 |
|
26 |
交通卡 停止 |
1 |
|
27 |
交通卡 红灯 |
1 |
|
28 |
交通卡 绿灯 |
1 |
|
29 |
交通卡 速度40 |
1 |
|
30 |
交通卡 速度60 |
1 |
|
21 |
交通卡 速度80 |
1 |
|





























3、sengo2 视觉传感器#
3.1 介绍#
Sengo2视觉传感器是一款面向中小学人工智能教育的图像识别设备。采用嘉楠科技的K210处理器,NPU神经网络内核带来强劲的图像识别性能,可处理多种离线图像识别算法,如颜色识别,线条检测,人脸识别,二维码识别,交通卡片识别等。通过UART串口或I2C方式与主控通讯。机身背面配有一块全视角1.3寸高清LCD屏幕,可实时显示图像画面及识别结果,便于用户使用和调试。
Sengo2支持Arduino、掌控板、Micro:bit、源师兄、ESP32等主流教育用开发板,支持MakeCode、Mind+、Mixly、OHCode V2等图形化编程平台,也支持Arduino、BXY/Thonny等代码编辑器。官方提供了多种驱动库,完全满足中小学开展人工智能教育以及AI竞赛的需求,也适合于学生个人或创客进行AI视觉产品的设计。
Sengo2体积轻巧,易于使用,传感器四周分布有12个兼容乐高机械组的定位孔设计,便于用户进行产品搭建和思维创新,完成丰富的主题教学或比赛设计。
3.2 组件介绍#
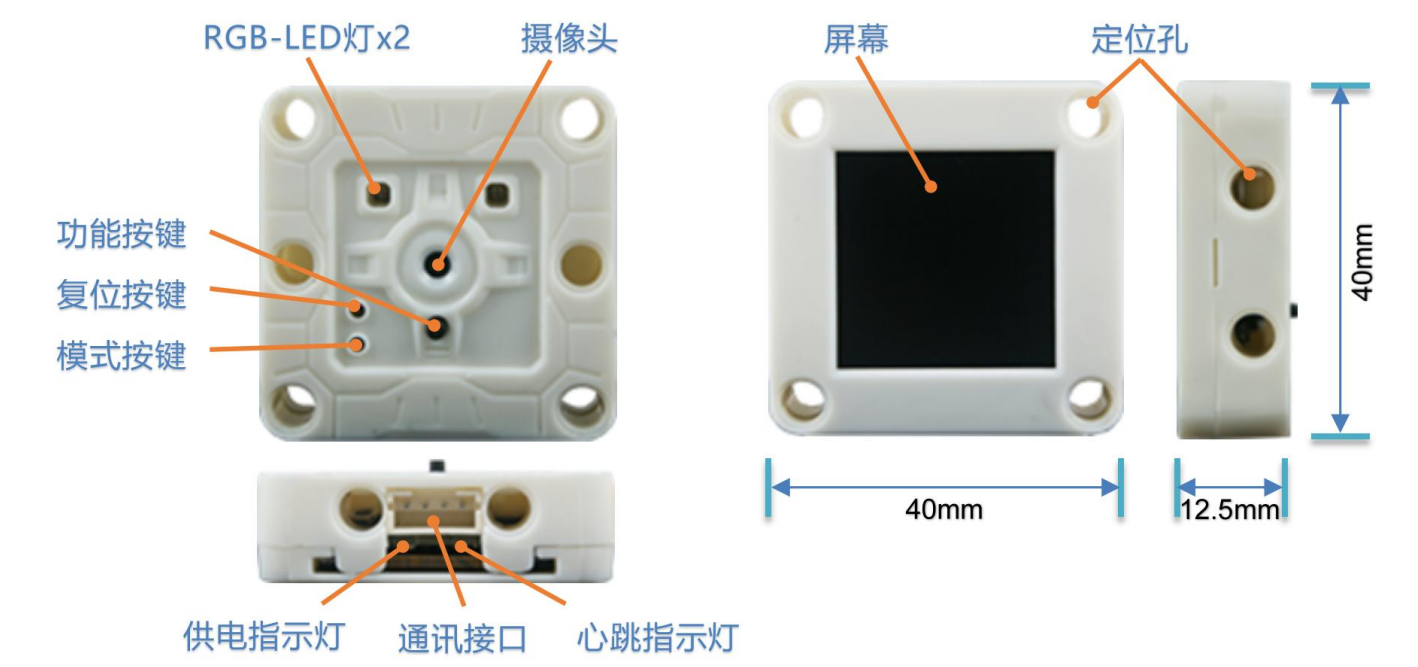
像头: 采集图像数据
屏幕: 实时显示摄像头画面和算法检测结果,便于观察和调试设备
通讯接口: 实现传感器与主控设备的数据通讯,采用PH2.0-4Pin接口,支持UART串口和I2C两种通讯模式
功能按键: 短按可快速切换算法,长按可训练/删除数据,开机时按下可进入固件烧录模式
模式按键: 短按切换通讯模式,长按可翻转摄像头的成像
复位按键: 可实现硬件复位,一般用于固件烧录
RGB-LED 灯: 不同的灯光颜色可反映算法识别的状态,LED颜色可通过编程指令进行设置
供电指示灯: 设备上电后,此LED灯会常亮显示
心跳指示灯: 设备正常工作时,此LED灯会有节奏的心跳闪烁
定位孔: 设备四周预留了多个4mm的定位孔,相邻间距16mm或32mm,兼容乐高类型的拼搭积木
3.3 参数#
项目 |
单位 |
参数 |
备注 |
|---|---|---|---|
输入电压 |
V |
3.3-5.0 |
超出此范围,可能导致设备工作异常或损坏 |
工作电流 |
mA |
140@5V |
5V 供电,开启人脸算法时的典型值 |
IO电平 |
V |
3.3-5.0 |
IO电平与输入电压一致。无法适配1.8V的主控设备 |
尺寸 |
mm |
40x40x12.5 |
外壳边缘尺寸,按键略高于壳体 |
重量 |
g |
15 |
|
摄像头类型 |
1 |
CMOS |
|
摄像头分辨率 |
像素 |
30W |
VGA镜头,最大640x480分辨率 |
镜头视场角 |
度 |
83 |
指画面斜对角,带红外滤光 |
屏幕类型 |
/ |
TFT |
262K色彩,全视角 |
屏幕尺寸 |
寸 |
1.3 |
指画面斜对角,240x240分辨率 |
LED指示灯 |
个 |
4 |
可编程RGB-LEDx2,电源指示灯,心跳指示灯 |
按键 |
个 |
3 |
功能按键、模式按键、复位按键 |
通讯接口 |
个 |
1 |
PH2.0-4pin接口 |
通讯方式 |
/ |
UART、I2C |
支持UART串口和I2C方式 |
硬件地址 |
/ |
0x60 |
7位I2C总线地址 |
定位孔数量 |
个 |
12 |
分布在外壳正反面、两侧及底部 |
定位孔中心距 |
mm |
16、32 |
|
定位孔直径 |
mm |
4 |
兼容乐高机械组类型的积木 |
3.4 按键与操作说明:#
3.4.1 按键操作#
按键 |
短按 |
长按5s |
长按10s |
上电时长按 |
|---|---|---|---|---|
功能 按键 |
切换算法 |
运行人脸识别等算法时, |
运行人脸识别等算法时, |
进入固件烧录模 式, |
模式 按键 |
切换UART或 I2C通讯方式 |
上下翻转镜头 |
无 |
无 |
复位 按键 |
复位硬件 |
无 |
无 |
无 |
3.4.2 算法切换#

操作: 短按功能按键。
简介: 当执行此操作后,Sengo2会按照算法ID编号依次循环切换算法,切换算法时Sengo2会自动关闭当前运行的算法,可以在屏幕上方查看当前所开启的算法。算法运行状态不会被保存,Sengo2重启后默认关闭所有算法。
算法切换顺序为:颜色识别 > 色块检测 > 标签识别 > 线条检测 > 深度学习 > 卡片识别 >人脸识别 > 20类物体 >二维码 >运动物体>…
注意: 通常使用时,应由主控设备发送指令控制算法的开启与关闭
3.4.3 模型数据存储与删除#

操作: 长按5秒功能按键后松开。
简介: 在运行人脸算法时,可以训练并存储当前的人脸数据并分配一个人脸ID编号。
操作: 长按10秒功能按键后松开。
简介: 在运行人脸算法时,可以删除最近一次训练的人脸数据,当再次长按时,会删除所有的人脸数据。如果本次运行人脸算法时并没有执行过训练人脸数据的操作,则直接删除所有的人脸数据。该操作同样适用于“深度学习”算法
3.4.4 切换通讯模式#
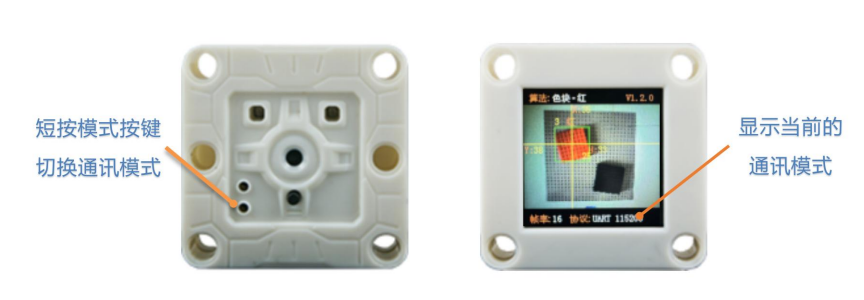
操作: 短按模式按键。
简介: 循环切换通讯模式,当执行此操作后,传感器会自动存储该通讯模式并重启设备,可以通过屏幕下方查看当前通讯模式。
Sengo2提供5种通讯模式,分别为I2C协议模式、UART-9600串口协议、UART-57600串口协议、UART-115200串口协议、UART-9600串口简单协议。默认为I2C 模式。
3.4.5 翻转摄像头画面#

操作: 长按5秒模式按键然后松开。
简介: 可以上下翻转摄像头成像方向,适合于镜头前置时使用(即镜头与屏幕位于同侧),执行该操作后,Sengo2会保存当前的状态,设备重启后仍然有效。
注意:镜头前置需要用户自行拆开外壳后手动翻转至屏幕侧,产品外壳结构本身不包含可旋转的机械结构,操作不当可能造成产品损坏,因此本操作只适合于有此需求且具备一定动手能力的用户!!!
3.4.6 进入固件烧录模式#

操作: 用户可通过2种方式进入固件烧录模式
1、设备上电后,压按功能按键不松开,短按复位按键,即可进入烧录模式,然后松开按键;
2、设备上电前,压按功能按键不松开,再插入数据线给设备上电,即可进入烧录模式,然后松开按键;
简介: 进入固件烧录模式,可以给Sengo2进行程序升级。
3.5 接线与使用说明#
3.5.1 接口定义#
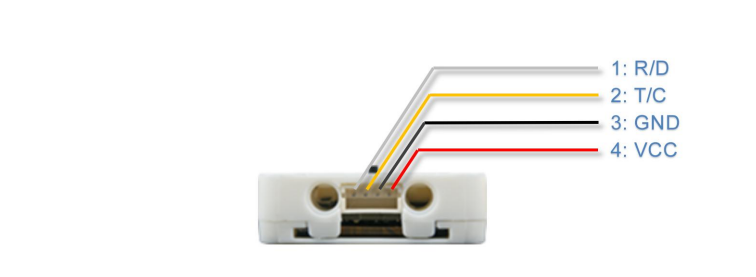
引脚序号 |
标识 |
功能 |
UART模式 |
I2C模式 |
|---|---|---|---|---|
1 |
R/D |
信号1 |
RX |
SDA |
2 |
T/C |
信号2 |
TX |
SCL |
3 |
GND |
电源负- |
GND |
GND |
4 |
VCC |
电源正+ |
VCC |
VCC |
注意:请务必确认接线无误后再上电,错误的接线可能会导致设备无法正常工作,甚至导致设备损坏。
3.5.2 通讯方式#
• I2C模式:采用I2C总线通讯协议,支持100~400Kbps通讯速率。硬件设备地址为0x60。
每次仅可读写一个字节的数据,不支持连续地址读写。
• UART-9600标准协议、UART-57600标准协议、UART-115200标准协议:此3种模式为串口通讯模式,数字代表通讯波特率,采用瞳芯智能视觉传感器标准指令协议。协议带有校验码,数据传输稳定可靠。可根据主控设备的硬件性能选择适合的波特率,波特率越大则通讯时间短,有利于提升系统的响应速度。较低的波特率适合于采用软串口的主控设备或数据线较长时的情景。
• UART-9600简单协议:串口通讯模式,波特率为9600,采用瞳芯智能视觉传感器简单指令协议。主控设备只需发送和接收字符串即可开启算法,获取结果,无需开发专用的驱动库,可适配任何具有UART串口通讯功能的硬件平台。
3.5.3 接线方式#
Sengo2可以适配多种主控设备,这里我们以UNO板进行举例说明如何进行接线,其他主控板如Micro:bit、Pico、ESP32开发板等。
Sengo2支持3.3V-5V供电,根据主控板电源供电能力选择合适的电源。如果电源稳定性较差,负载能力偏小,尤其是当电机、舵机、喇叭等外设与Sengo2共用电源时,可能发生供电不稳定造成Sengo重启。
3.5.3.1 硬件UART串口模式#
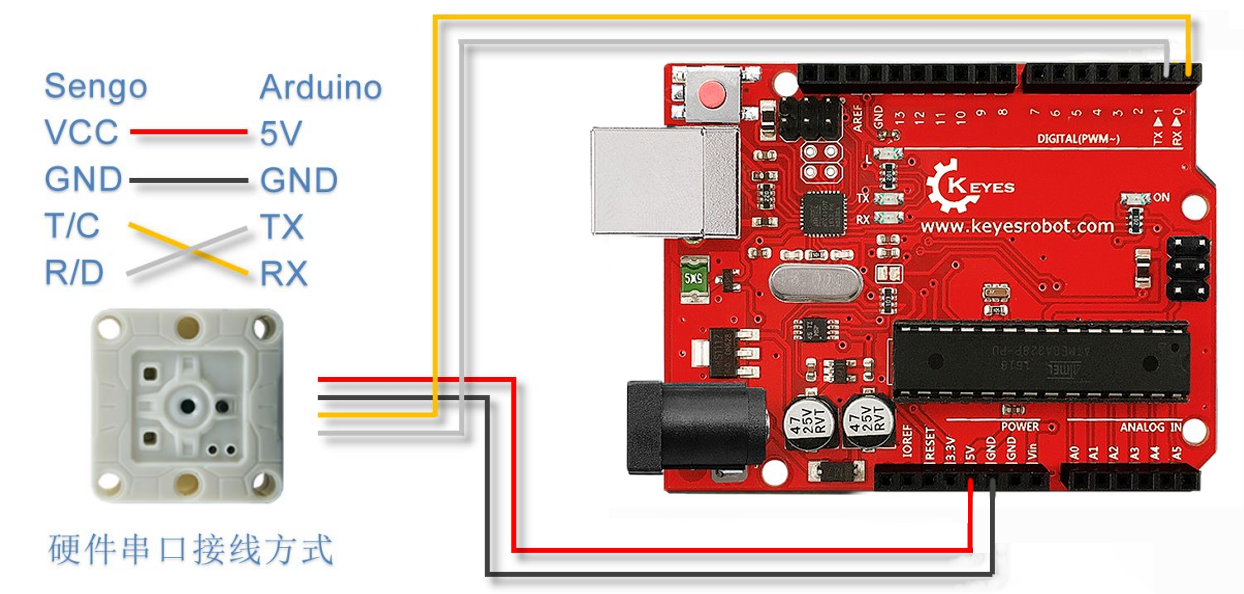
硬件UART模式下,Sengo2的RX引脚需要接Arduino的TX引脚,Sengo2的TX引脚接Arduino的RX引脚。
某些型号的Arduino主控板例如常见的UNO板,只有一个硬件串口。由于烧录ArduinoUNO默认的程序烧录端口、调试端口均采用与此串口,因此在烧录程序时需要断开与Sengo2的接线,Arduino代码中不能使用print输出调试信息,否则会导致Sengo2通讯异常。推荐使用I2C模式,降低接线的难度以及出错的概率。
3.5.3.2 软件模拟串口模式#
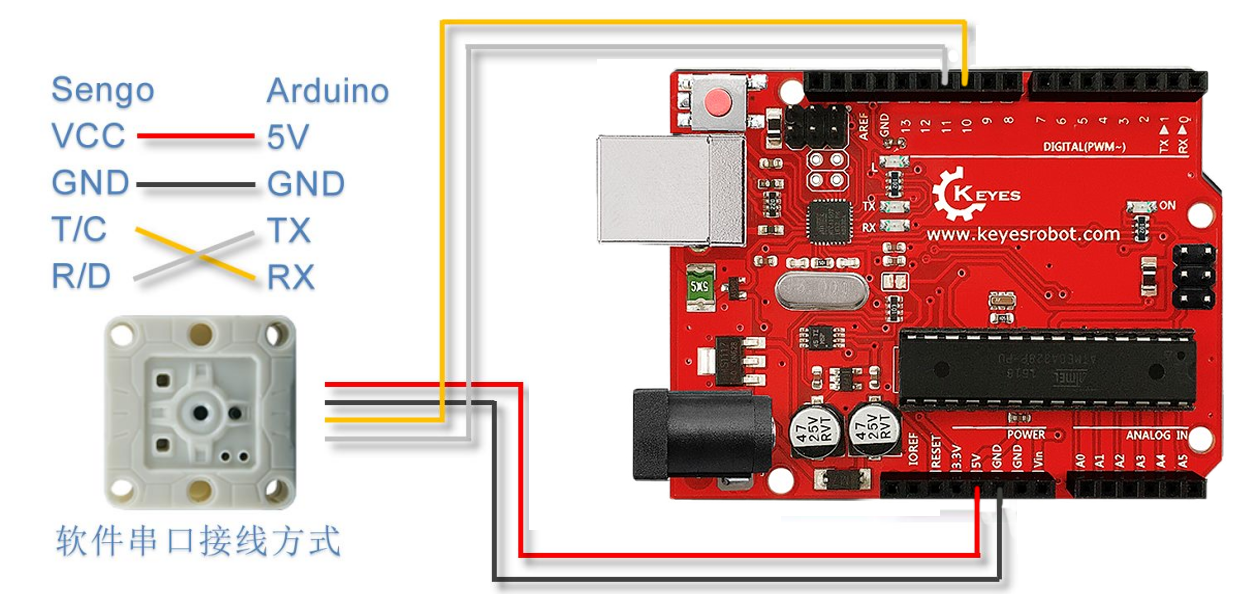
软件模拟串口模式又称软串口模式,指通过软件模拟将Arduino普通的IO口分别定义为TX和RX引脚,通过IO口的电平变化来模拟UART的信号波形,进而实现数据通信。本示意图中将IO口10定义为RX引脚,IO口11定义为TX引脚,Arduino IDE中软串口的引脚定义代码如下:
#include <SoftwareSerial.h>
#define TX_PIN 11
#define RX_PIN 10
SoftwareSerial mySerial(RX_PIN, TX_PIN);
注意:软串口模式下,通讯波特率建议设置范围为9600~57600,高波特率可能会导致数据传输失败。
3.5.3.3 I2C 模式#
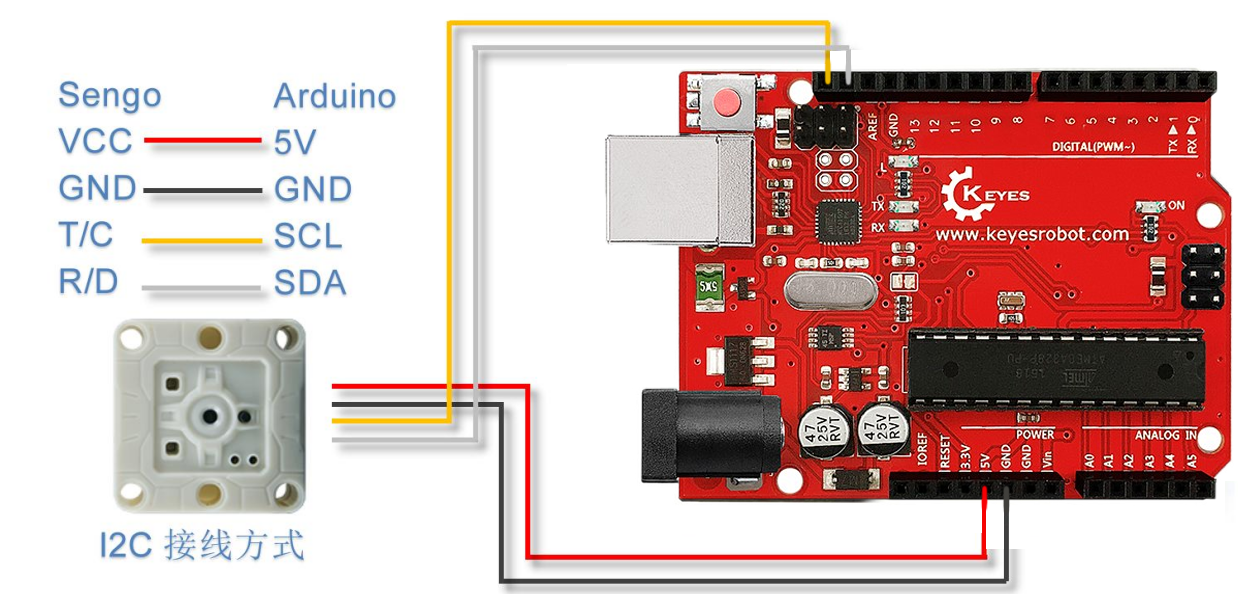
Sengo2的T/C脚接主控的SCL,R/D脚接主控的SDA。I2C模式下,通讯线不易太长,避免数据干扰造成通讯异常。
3.6 运行界面#
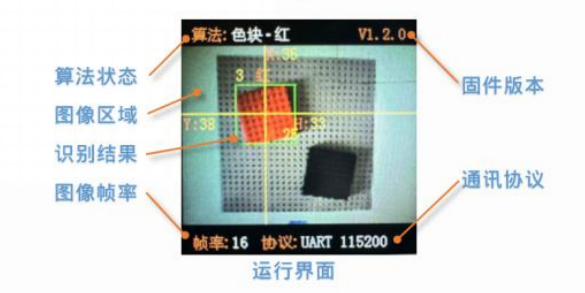
算法状态: 显示当前正在运行的算法
固件版本: 显示当前固件版本号
图像区域: 实时显示摄像头画面
识别结果: 识别到物体后会以画框或画线的方式,标记物体的坐标方位、大小及标签等信息
图像帧率: 显示算法的运行帧率,不同算法的运行速度会有所差别,光照强度也会对帧率有所影响
通讯协议: 显示当前采用的通讯协议
3.7 识别结果#
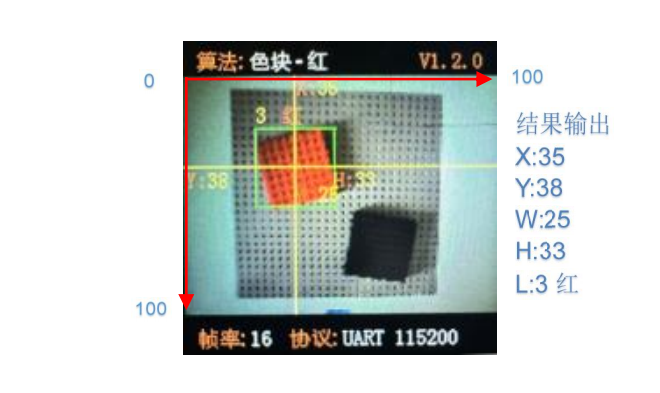
坐标系: Sengo2采用“百分比”相对值坐标系,即沿水平方向X与竖直方向Y将图像100等分,摄像头画面左上角为原点坐标(0,0),右下角坐标为(100,100),图像中心区域坐标为(50,50)
检测结果: Sengo2检测到物体后,不同的算法会返回不同的识别结果,包括物体的坐标方位信息,物体大小信息,分类标签信息。以上信息会在屏幕上显示,方便用户观察与调试主控设备需要通过协议指令读取结果,Sengo2不主动外发数据
水平坐标X: 物体中心点水平方向的坐标,范围0~100
垂直坐标Y: 物体中心点垂直方向的坐标,范围0~100
物体宽度W: 物体外轮廓所组成的矩形的水平边长,范围0~100
物体高度H: 物体外轮廓所组成的矩形的垂直边长,范围0~100
分类标签L: 对于可分类的算法,用一个数字ID指代某一个物体。相同的数字在不同的算法中的含义可能不同,比如数字3在颜色识别算法中代表红色,而在卡片算法中代表右转
特殊: 颜色识别算法会返回RGB颜色分量,线条检测算法会返回两个端点的坐标以及倾斜角度,二维码算法会返回二维码中的字符信息等,详见各算法介绍
3.8 算法介绍#
Sengo2内部集成了多个简单实用的离线算法,并为每个算法分配了一个ID编号,此编号是主控设备与传感器通讯交互的唯一标识,用于控制算法的开启关闭、设置参数或读取结果。
算法ID |
中文名称 |
英文名称 |
简介 |
|---|---|---|---|
1 |
颜色识别 |
Color |
返回指定识别区域的颜色信息:RGB分量值及颜色的分类标签 |
2 |
色块检测 |
Blob |
检测图像中是否有指定参数的色块,支持检测黑、白、红 、 |
3 |
标签识别* |
Apriltag* |
支持16H5或25H9或36H11编码格式的Apriltag识别, |
4 |
线条检测 |
Line |
检测图像中的线条,返回两个端点坐标及倾斜角度 |
5 |
深度学习* |
Learning* |
对任意物体进行离线训练并进行识别,可存储15个模型 数据 |
6 |
卡片识别* |
Card* |
识别配套的10张交通卡片 |
7 |
人脸识别* |
Face* |
记忆与识别人脸,支持口罩检测,可存储15张人脸数据 |
8 |
20类物体* |
20Class* |
识别常见的20类物体,如猫、狗、汽车等 |
9 |
二维码 |
QrCode |
识别由不超过10个字符生成的二维码 |
11 |
运动物体 |
Motion |
判断图像中是否有运动中的物体 |
注意:①不带星号的算法可以同时运行多个;带星号的算法任意时刻只能开启运行一个,但可以与不带星号的算法并行运行。同时开启多个算法,算法的运行速度会降低;②部分算法支持检测/识别并输出多个结果的信息,但部分主控设备例如Arduino UNO因自身RAM大小的限制,无法存储全部的结果信息,导致出现丢失数据的问题。当需要获取超过5个检测 / 识别结果的信息时,建议选择以ESP32等RAM较大的芯片为处理器的主控设备。