4.3 标签识别#
4.3.1 算法简介#
判断图像中是否有Apriltag标签, 支持16H5、25H9、36H11三种编码。算法运行时需要先选定一种编码格式,默认为36H11。不同编码的 Apriltag无法同时检测,但可以同时识别多达 25个相同编码的标签。
注意:该算法不可以与其他带 * 号的算法同时运行
4.3.2 分类标签#
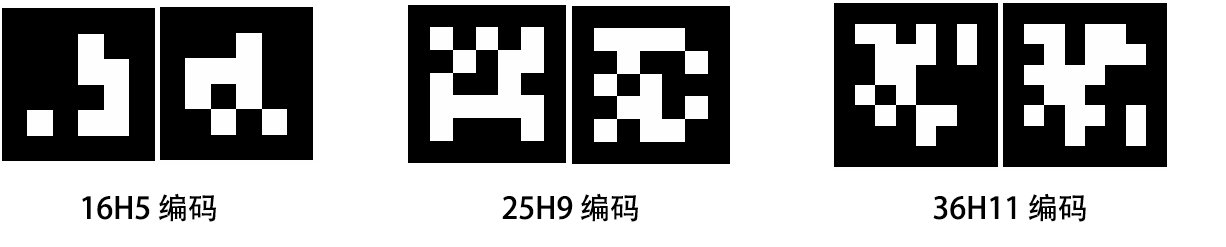
Apriltag标签为一组已经定义好的黑白方块图案,不同编码形式使用的方块数量是不同的。每个图案都有一个预定义的分类标签值,识别后会返回该值。
4.3.3 配置参数#
用户可指定编码格式,如未指定新的参数,则以默认格式36H11运行,参数定义如下:
模式 |
含义 |
|---|---|
kVisionModeFamily16H5 |
16H5 编码 |
kVisionModeFamily25H9 |
25H9 编码 |
kVisionModeFamily36H11 |
36H11 编码 |
代码:
# 选择编码格式,默认36H11。如果需要在程序运行过程中切换编码格式,请先关闭Apriltag算法,设置完毕编码格式后再开启算法
#sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily36H11)
#sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily25H9)
sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily16H5)
4.3.4 返回结果#
识别到标签后会返回其坐标、大小和标签编号
当通过主控读取寄存器时,将会返回以下的数据:
参数 |
含义 |
|---|---|
kXValue |
标签中心横坐标x |
kYValue |
标签中心纵坐标y |
kWidthValue |
标签宽度w |
kHeightValue |
标签高度h |
kHeightValue |
标签编号 |
代码:
for i in range(1,obj_num+1):
x = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kXValue, i)
y = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kYValue, i)
w = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kWidthValue, i)
h = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kHeightValue, i)
l = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kLabel, i)
print("tag#%d: x=%d, y=%d, w=%d, h=%d, label=%d"%(i, x, y, w, h, l))
4.3.5 使用技巧#
算法返回的标签宽度值与高度值比较稳定,可以利用这一点进行距离判断,标签旋转后不会改变其大小,但倾斜时可能会有影响
标签越大,识别的距离就越远
4.3.6 代码#
from machine import I2C,UART,Pin
from Sengo2 import *
import time
# 等待Sengo2完成操作系统的初始化。此等待时间不可去掉,避免出现Sengo2尚未初始化完毕主控器已经开发发送指令的情况
time.sleep(2)
# 选择UART或者I2C通讯模式,Sengo2出厂默认为I2C模式,短按模式按键可以切换
# 4种UART通讯模式:UART9600(标准协议指令),UART57600(标准协议指令),UART115200(标准协议指令),Simple9600(简单协议指令),
#########################################################################################################
# port = UART(2,rx=Pin(16),tx=Pin(17),baudrate=9600)
port = I2C(0,scl=Pin(21),sda=Pin(20),freq=400000)
# Sengo2通讯地址:0x60。如果I2C总线挂接多个设备,请避免出现地址冲突
sengo2 = Sengo2(0x60)
err = sengo2.begin(port)
print("sengo2.begin: 0x%x"% err)
# 选择编码格式,默认36H11。如果需要在程序运行过程中切换编码格式,请先关闭Apriltag算法,设置完毕编码格式后再开启算法
#sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily36H11)
#sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily25H9)
sengo2.VisionSetMode(sengo2_vision_e.kVisionAprilTag, apriltag_vision_mode_e.kVisionModeFamily16H5)
time.sleep(1)
# 1、Apriltag与二维码不同,请勿混淆。二者在使用时,周围一圈均需要留白;
# 2、sengo2可以同时运行多个算法,但有限制要求
# 3、Sengo系列产品参数与结果的编号都是从1开始;
# 4、正常使用时,应由主控器发送指令控制Sengo2算法的开启与关闭,而非通过摇杆手动进行操作;
err = sengo2.VisionBegin(sengo2_vision_e.kVisionAprilTag)
print("sengo2.VisionBegin(sengo2_vision_e.kVisionAprilTag):0x%x"% err)
while True:
# Sengo2不主动返回检测识别结果,需要主控板发送指令进行读取。读取的流程:首先读取识别结果的数量,接收到指令后,Sengo2会刷新结果数据,如果结果数量不为零,那么主控再发送指令读取结果的相关信息。请务必按此流程构建程序。
obj_num = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kStatus)
if obj_num:
print("Totally %d tags: "%( obj_num ))
for i in range(1,obj_num+1):
#获取位置和大小
x = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kXValue, i)
y = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kYValue, i)
w = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kWidthValue, i)
h = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kHeightValue, i)
#获取标签编号
l = sengo2.GetValue(sengo2_vision_e.kVisionAprilTag, sentry_obj_info_e.kLabel, i)
print("tag#%d: x=%d, y=%d, w=%d, h=%d, label=%d"%(i, x, y, w, h, l))
time.sleep(0.2)
print("\n")
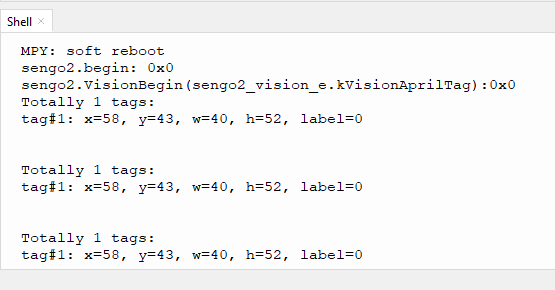
4.3.7 代码结果#
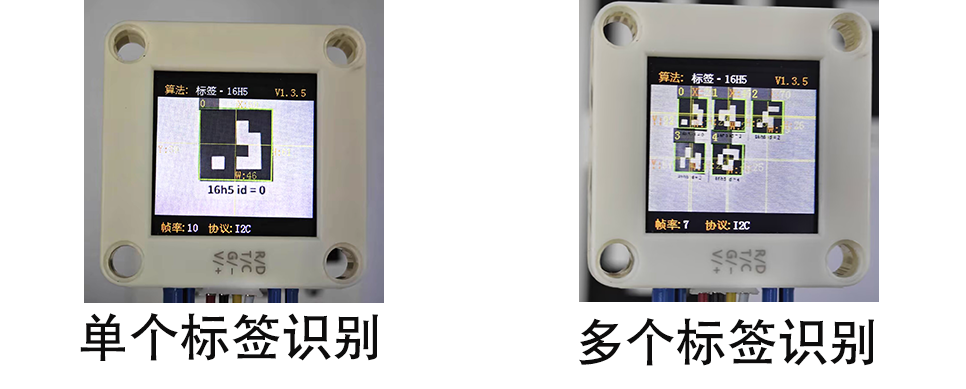
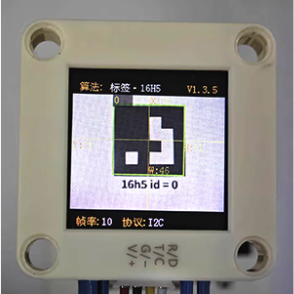
上传代码后,AI视觉模块将会对摄像头拍到的地方进行识别如果有16H5标签则会被他捕捉并识别,然后通过串口监视器进行打印标签在屏幕上显示的位置xy与宽度高度以及标签代表的值。
4.3.8 扩展玩法#
标签指令卡片
玩法简介: 将标签对应0-4对应到一个动作,如舵机旋转90度或者小车前进等操作。
实现: 开发板读取标签的ID序列,通过对标签ID序列的判断从而执行对应的操作。