项目十 寻光智能车#
项目介绍:
前面我们详细的介绍了智能车上各个传感器、模块、扩展板的使用方法。在这里我们可以结合第3课和第8课中知识制作一个寻光智能车。实验中,我们通过2个光敏电阻模块检测智能车左右两边的光照强度,读取中对应的模拟值,然后根据这2个数据控制两个电机的转动,从而控制智能车的运动状态。
寻光智能车具体逻辑如下表格:
检测 (亮度越大,数值越大) |
左边光敏电阻模块(left_light) |
|---|---|
检测 (亮度越大,数值越大) |
右边光敏电阻模块(right_light) |
条件 |
left_light>650并且right_light>650 |
状态 |
前进(PWM设为200) |
条件 |
left_light>650并且right_light≤650 |
状态 |
左旋转(PWM设为200) |
条件 |
left_light≤650并且right_light>650 |
状态 |
右旋转(PWM设为200) |
条件 |
left_light≤650并且right_light≤650 |
状态 |
停止 |
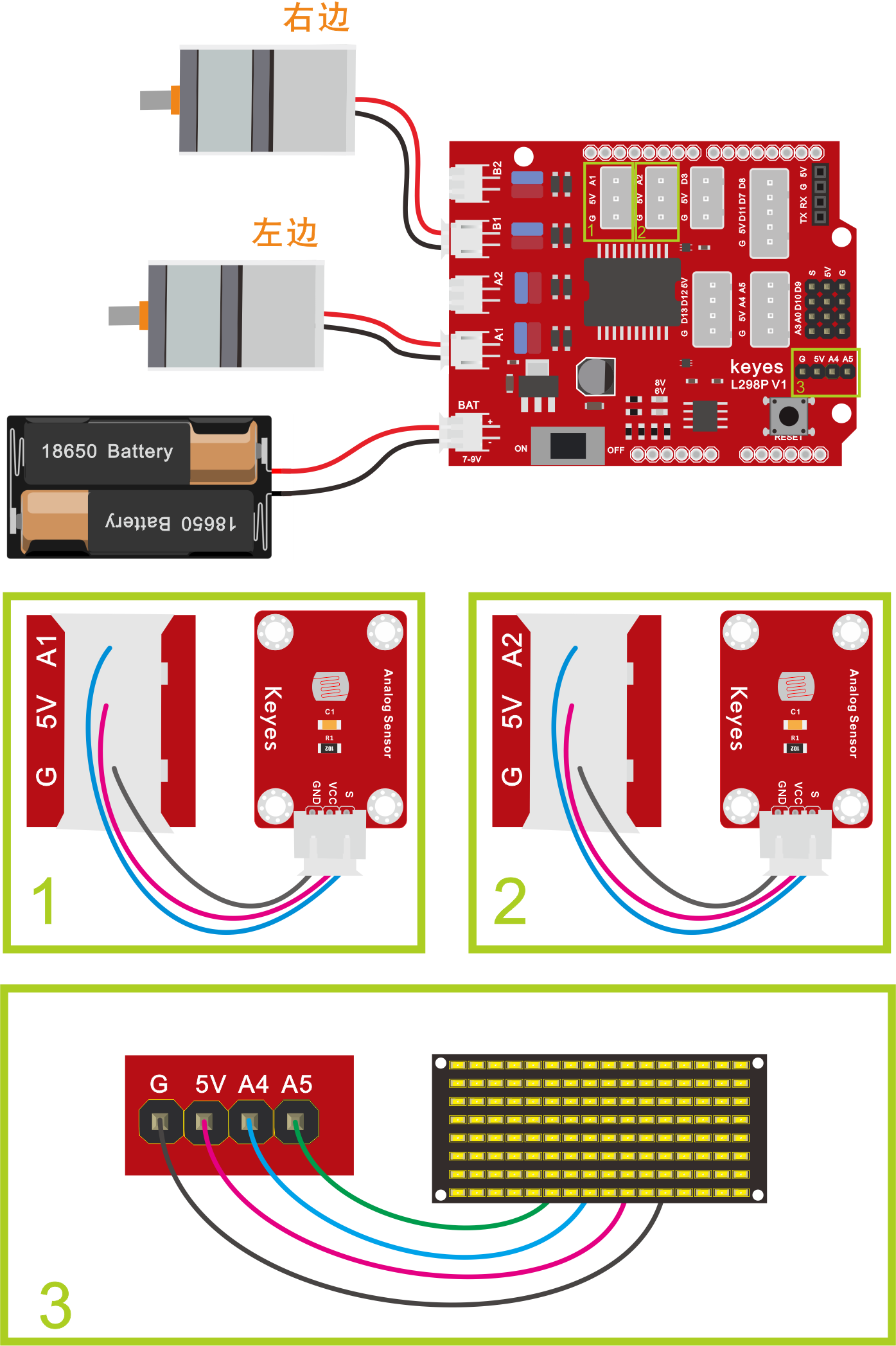
接线图:
⚠️特别注意:坦克智能车已经组装好了,这里不需要把传感器模块和其他的都拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
测试代码:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
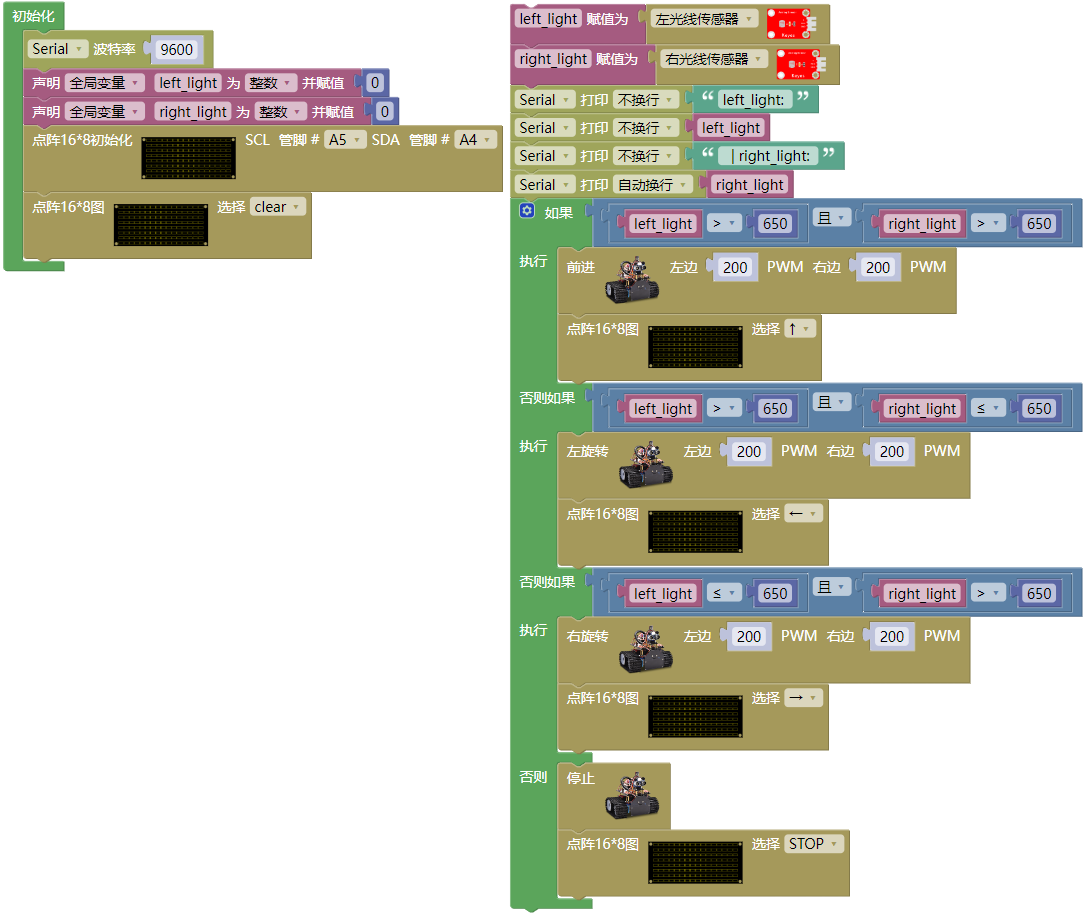
好了, 迷你智能车寻光功能效果的代码全部编写好了,上传程序,看看精彩的效果!
测试结果:
上传代码成功后,按照接线图接线,拨码开关拨打到右端上电后,智能车能够跟随着光移动。