项目十一 超声波跟随智能车#
项目介绍:
我们结合硬件知识-各种传感器,模块,电机驱动器,来制造超声波跟随机器人车!
实验中,我们通过检测智能车和前方障碍物的距离,然后根据这个数据控制两个电机的转动,从而控制智能车的运动状态。
跟随智能车具体逻辑如下表格:
检测 |
超声波测试前方物体距离(distance(单位:cm)) |
|---|---|
条件 |
distance<8 |
状态 |
后退(PWM设为200) |
条件 |
8≤distance<13 |
状态 |
停止 |
条件 |
13≤distance≤35 |
状态 |
前进(PWM设为200) |
条件 |
distance>35 |
状态 |
停止 |
按照前面思路设计好智能车后,我们就需要按照设计思路开始制作智能车。我们需要设计对应的接线,测试代码,然后接线上传代码,运行,确保智能车能够实现理想中的功能。
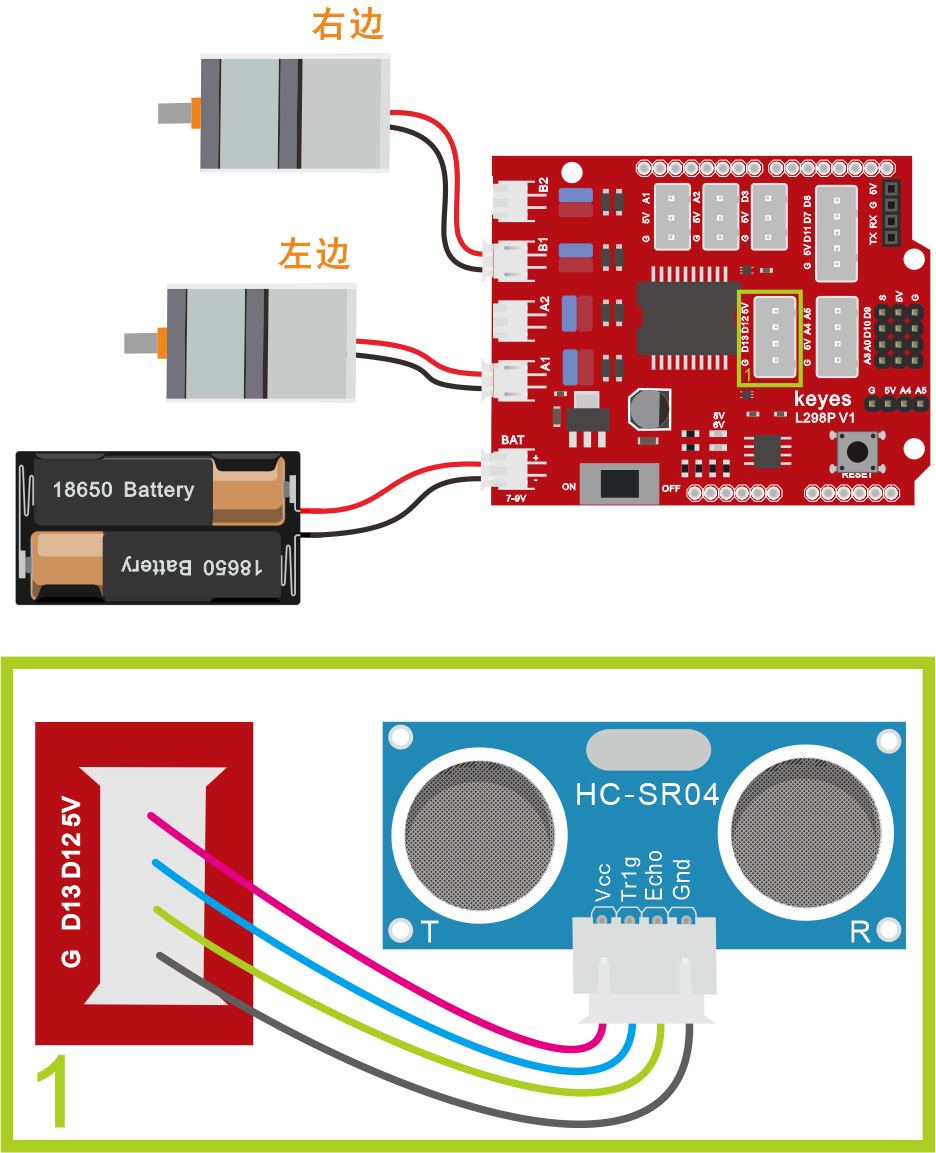
接线图:
⚠️特别注意:坦克智能车已经组装好了,这里不需要把传感器模块和其他的都拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
超声波模块+电机
接线注意: 左、右电机分别对应的连接电机驱动扩展板上的接口A和接口B;超声波传感器模块的V引脚至5V,T(Trig)引脚至数字12(S),E(Echo)引脚至数字13(S),G引脚至G;电源接到BAT接口。
测试代码:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
/*
迷你履带坦克机器人
课程 11
超声波跟随智能车
http://www.keyes-robot.com
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int trigPin = 12; //定义TRIG引脚接D12
int echoPin = 13; //定义ECHO引脚接D13
int distance;
int MA = 2; //定义电机A方向控制引脚为D2
int PWMA = 6; //定义电机A速度控制引脚为D6
int MB = 4; //定义电机A方向控制引脚为D4
int PWMB = 5; //定义电机A速度控制引脚为D5
//数组,用于储存图案的数据,可以自己算也可以从取摸工具中得到
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back01[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_Pin A5 //设置时钟引脚为 A5
#define SDA_Pin A4 //设置数据引脚为 A4
int get_distance() { //超声波测距函数
int distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); //给TRIG引脚至少10us的时间触发
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
distance = pulseIn(echoPin, HIGH) / 58; //检测脉冲宽度,并计算出距离
delay(20); //延时20ms
return distance;
}
void setup() {
Serial.begin(9600); //设置波特率为9600
myservo.attach(10); // attaches the servo on pin 10 to the servo object
pinMode(trigPin, OUTPUT); //定义TRIG为输出模式
pinMode(echoPin, INPUT); //定义ECHO为输入模式
pinMode(MA, OUTPUT); //配置电机引脚为输出模式
pinMode(PWMA, OUTPUT);
pinMode(MB, OUTPUT);
pinMode(PWMB, OUTPUT);
//设置引脚为输出
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
//清屏
matrix_display(clear);
myservo.write(90);//转到90度
delay(500);
}
void loop() {
distance = get_distance(); //调用测距函数
if (distance < 8 ) {//如果距离小于8
back();//后退
}
else if (distance >= 8 && distance < 13) { //如果距离大于等于8,小于13
stopp();//停止
}
else if (distance >= 13 && distance <= 35 ) { //如果距离大于等于13,小于35
advance();//跟随
}
else {//如果以上都不是
stopp();//停止
}
}
void advance() { //小车前进
matrix_display(front); //显示向前的图案
digitalWrite(MA, HIGH); //电机A逆时针转
analogWrite(PWMA, 200); //电机A速度为200
digitalWrite(MB, HIGH); //电机B顺时针转
analogWrite(PWMB, 200); //电机B速度为200
}
void back() { //小车后退
matrix_display(back01); //显示后退的图案
digitalWrite(MA, LOW); //电机A顺时针转
analogWrite(PWMA, 200); //电机A速度为200
digitalWrite(MB, LOW); //电机B逆时针转
analogWrite(PWMB, 200); //电机B速度为200
}
void turnL() { //小车左转
matrix_display(left); //显示左转的图案
digitalWrite(MA, LOW); //电机A顺时针转
analogWrite(PWMA, 200); //电机A速度为200
digitalWrite(MB, HIGH); //电机B顺时针转
analogWrite(PWMB, 200); //电机B速度为200
}
void turnR() { //小车右转
matrix_display(right); //显示右转的图案
digitalWrite(MA, HIGH); //电机A逆时针转
analogWrite(PWMA, 200); //电机A速度为200
digitalWrite(MB, LOW); //电机B逆时针转
analogWrite(PWMB, 200); //电机B速度为200
}
void stopp() { //小车停止
matrix_display(STOP01); //显示停止的图案
analogWrite(PWMA, 0); //电机A速度为0
analogWrite(PWMB, 0); //电机B速度为0
}
//这个函数用于点阵屏显示
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //调用数据传输开始条件的函数
IIC_send(0xc0); //选择地址
for (int i = 0; i < 16; i++) //图案数据有16个字节
{
IIC_send(matrix_value[i]); //传输图案的数据
}
IIC_end(); //结束图案数据传输
IIC_start();
IIC_send(0x8A); //显示控制,选择脉宽为4/16
IIC_end();
}
//传输数据开始的条件
void IIC_start()
{
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
}
//传输数据
void IIC_send(unsigned char send_data)
{
for (char i = 0; i < 8; i++) //每个字节有8位
{
digitalWrite(SCL_Pin, LOW); //将时钟引脚SCL_Pin拉低,才可以改变SDA的信号
delayMicroseconds(3);
if (send_data & 0x01) //根据字节的每一位是1还是0来设置SDA_Pin的高低电平
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //将时钟引脚SCL_Pin拉高,停止数据的传输
delayMicroseconds(3);
send_data = send_data >> 1; //一位一位的检测,所以将数据右移一位
}
}
//数据传输结束的标志
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
好了, 迷你智能车跟随功能效果的代码全部编写好了,上传程序,看看精彩的效果!
测试结果:
将驱动扩展板堆叠在UNO R3板上,上传好代码,按照接线图接线,将拨码开关拨至ON端后,智能车能够随着前方障碍物的移动而移动。