项目八 电机的驱动和调速#
项目介绍:
驱动电机的方法有很多,我们这个智能车用到的是最常用的L298P这个方案, L298P是ST意法半导体公司出品的优秀大功率电机专用驱动芯片,可直接驱动直流电机、二相、四相步进电机,驱动电流达2A,电机输出端采用8只高速肖特基二极管作为保护。
我们根据L298P的电路设计了一款扩展板,叠层的设计可直接插接到开发板上使用,降低了用户使用和驱动电机的技术难度。我们来看一下这个板子的电路图和示意图:
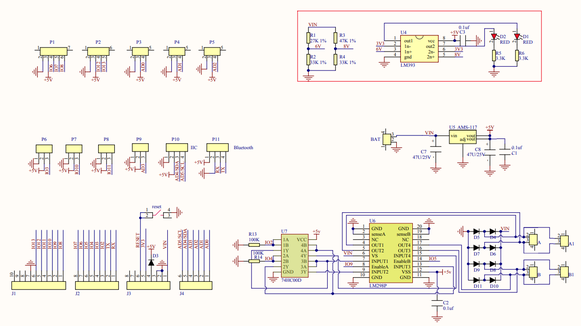

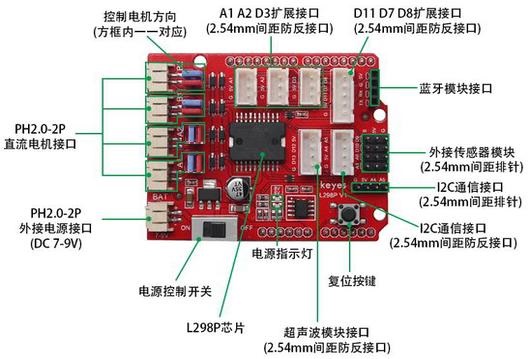
为了调节小车上的4个电机,使得电机电机的驱动方向与后续的课程代码描述一致。驱动板上自带8个跳线帽,也可用于控制电机转向,例如当MA电机接口前方2个跳线帽由横向连接改为纵向连接时,MA电机的转动方向就和原来的转动方向相反。
规格参数:
逻辑部分输入电压:DC 5V
驱动部分输入电压:DC 7-12V
逻辑部分工作电流:<36mA
驱动部分工作电流:<2A
最大耗散功率:25W(T=75℃)
控制信号输入电平:高电平2.3V<Vin<5V ,低电平-0.3V<Vin<1.5V
工作温度:-25+130℃
驱动小车运行原理:
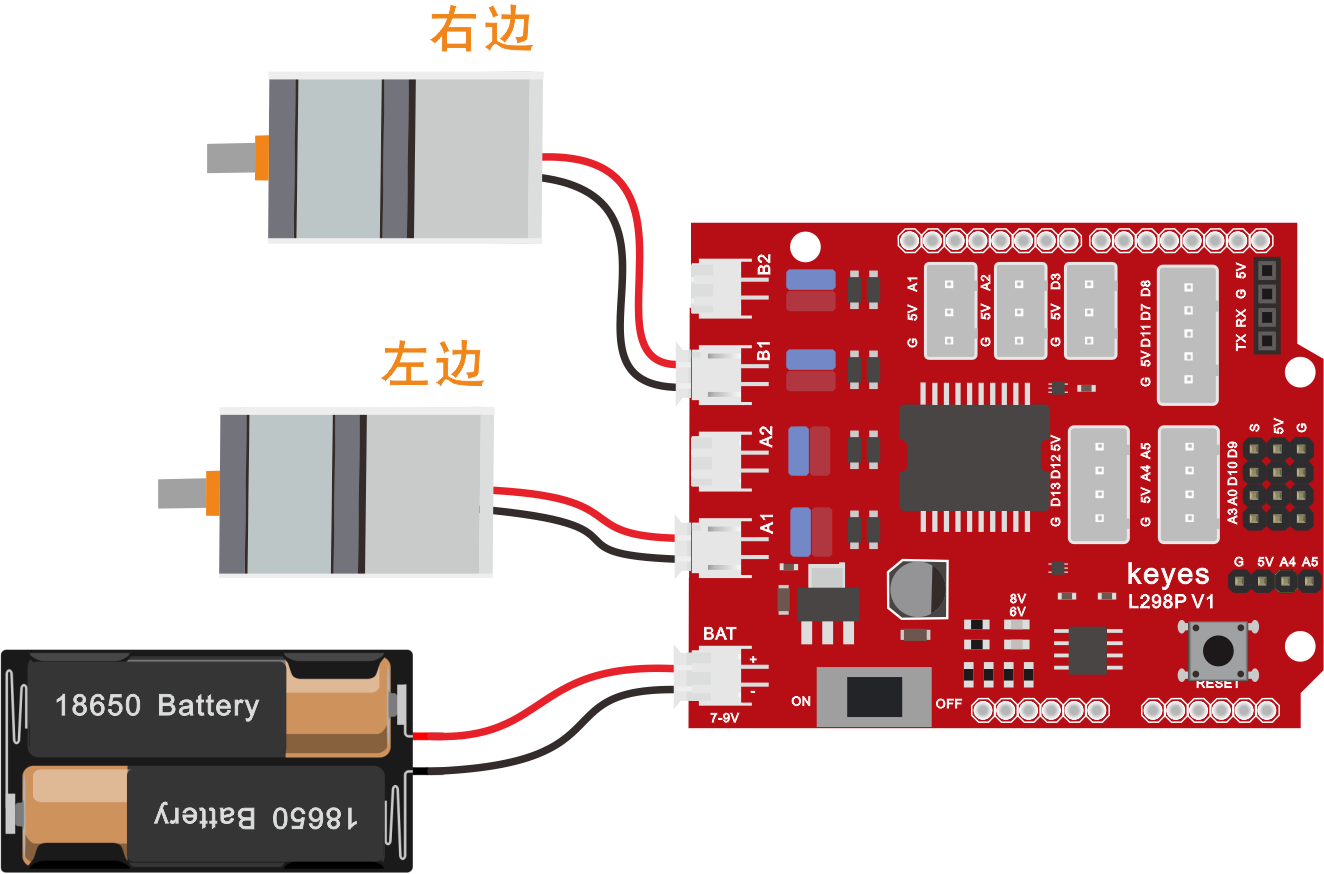
根据上面电机驱动板的电路图和示意图,我们让左边电机(MA电机)的方向引脚在D2,调速引脚在D6,右边电机(MB电机)的方向引脚在D4,调速引脚在D5,按照以下表格的运动逻辑,我们就可以知道如何通过控制数字口和PWM口来控制2个电机转动,从而实现智能小车的行走。其中PWM值范围为0-255,设置数值越大,电机转动越快。(电机扩展板上的A1、A2接口是接左边电机、B1、B2接口是接右边电机)
\ |
D2 |
D6(PWM) |
电机MA |
D4 |
D5(PWM) |
电机MB |
|---|---|---|---|---|---|---|
前进 |
HIGH |
200 |
逆时针转 |
HIGH |
200 |
顺时针转 |
后退 |
LOW |
200 |
顺时针转 |
LOW |
200 |
逆时针转 |
左转 |
LOW |
200 |
顺时针转 |
HIGH |
200 |
顺时针转 |
右转 |
HIGH |
200 |
逆时针转 |
LOW |
200 |
逆时针转 |
停止 |
/ |
0 |
停止 |
/ |
0 |
停止 |
项目组件:
UNO R3 开发板*1 |
L298P 电机驱动扩展板 V1*1 |
金属电机 *2 |
|---|---|---|
|
|
|
USB线 |
18650双节电池盒(18650电池*2 (电池自配))*1 |
|
|
|




接线图:
⚠️特别注意:坦克智能车已经组装好了,这里不需要把传感器模块和其他的都拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
项目代码:
认识新代码块
① 这个代码块,表示当启动ESP32这块开发板时,将运行代码。

② 循环语句,顾名思义就是重复做一件事。

③ 向电机模块设置引脚INA的高低电平状态,高低电平决定了电机是顺时针转还是逆时针转;设置引脚INB的模拟输出(0~255),决定电机的转速,模拟输出值越大,电机转动越快。

④ 将程序的执行暂停一段时间,也就是延时,单位是秒。

组合代码块
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)

项目结果:
上传代码成功,外接电源,将拨码开关拨到ON端。上电后,智能车前进1秒,后退1秒,左转1秒,右转1秒,停止1秒,循环。
项目拓展:
我们来通过调整PWM控制电机的速度,为后面我们控制车速做一个铺垫,接线不变
实验代码:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
注意: 如果上电后,小车的运动缓慢,可能是代码中PWM值设置太小了,可以设置为150.

上传代码成功,外接电源,将拨码开关拨到ON端。上电后,智能车前进1秒,后退1秒,左转1秒,右转1秒,停止1秒,循环。怎么样,电机转动的速度是不是慢了很多?