5.5 智能投石车#
5.5.1 简介#
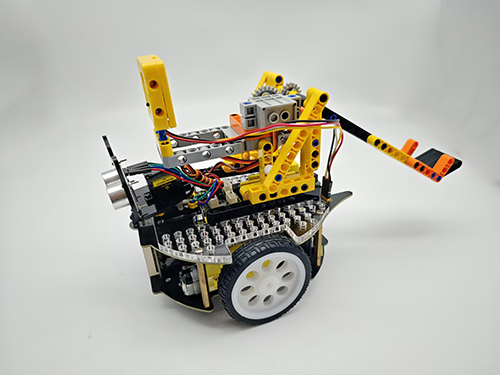
使用AI视觉模块搭配小车的投石攻城车造型,制作出有趣的自动识别投石器,先将AI视觉模块固定到投石器小车上,然后使用AI模块进行识别如果识别到了人体就蜂鸣器开始倒计时3声然后投掷,投掷结束后缓慢落下投掷臂等待下一次识别到人体后投掷。
5.5.2 将AI模块安装到投石小车上#
注意:你需要先按照小车教程将`投石攻城车`的乐高搭建好,然后再按照下方的安装教程进行安装。
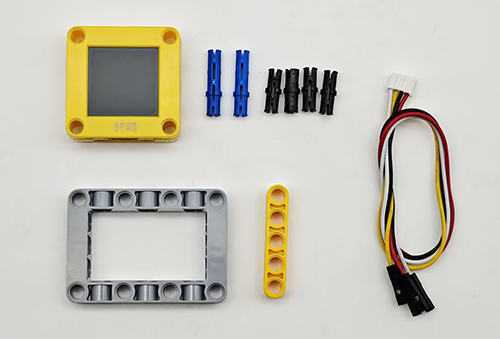
所需配件
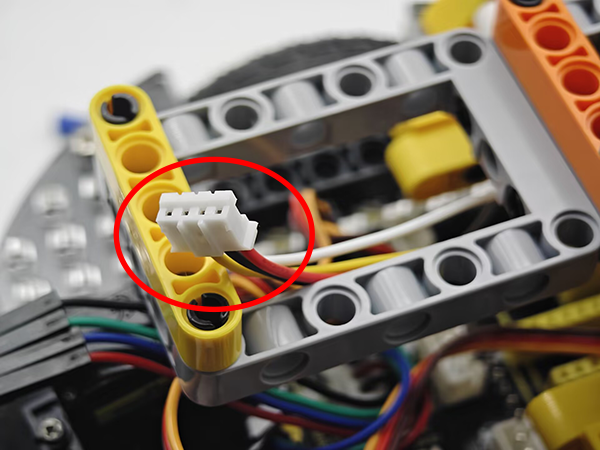
步骤1:
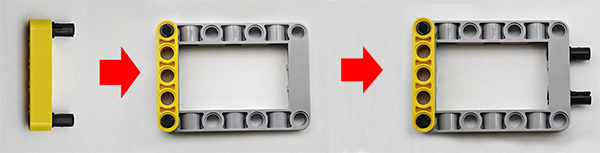
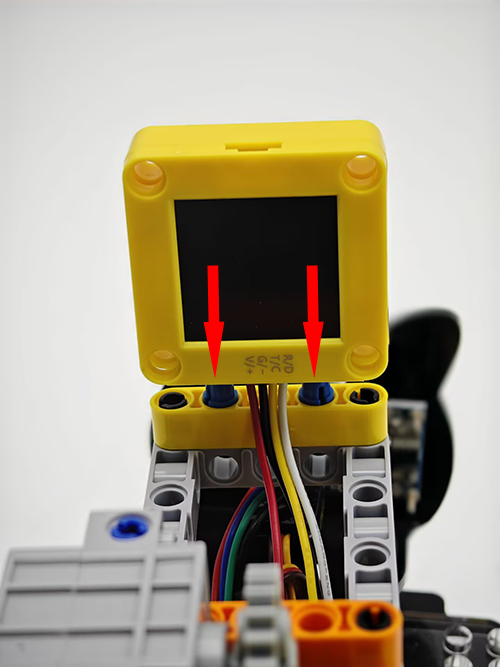
步骤2:
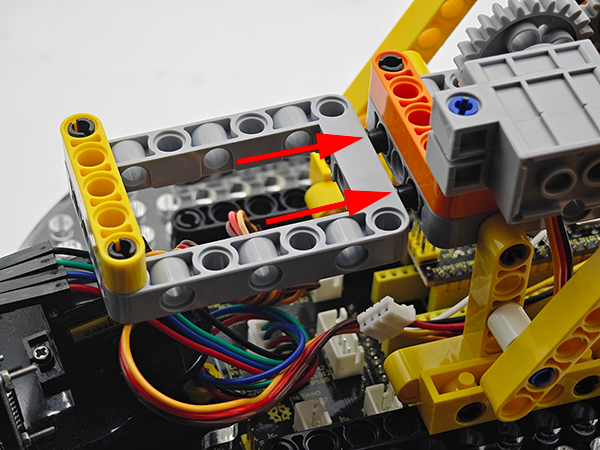
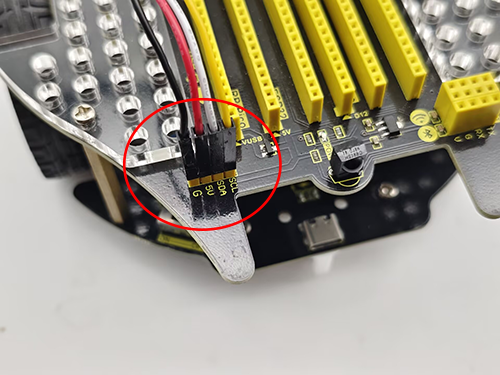
步骤3:
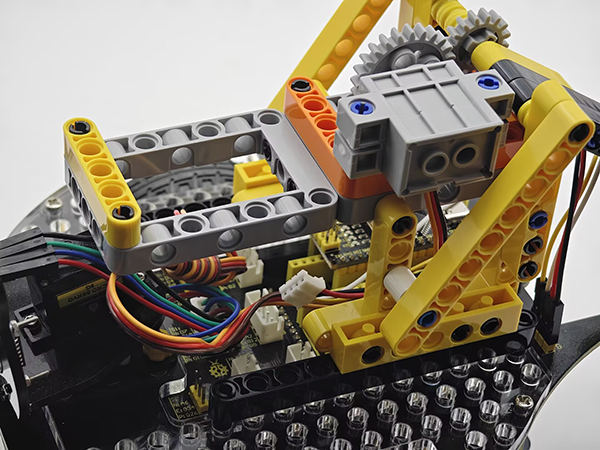
步骤4:
AI视觉模块 |
小车接口 |
|---|---|
T/C (黄色线) |
SCL |
R/D (白色线) |
SDA |
V/+ (红色线) |
5V |
G/- (黑色线) |
G |
完整展示:
5.5.3 流程图#
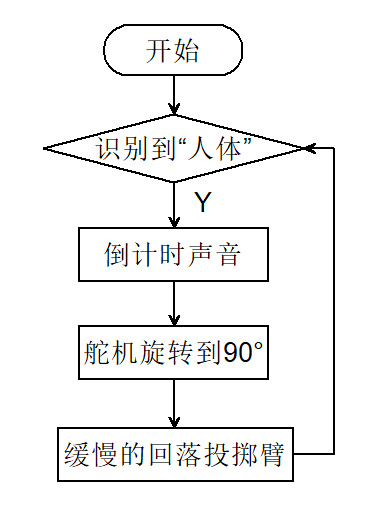
5.5.4 代码#
from machine import I2C,UART,Pin,PWM
from Sengo1 import *
import time
# 舵机控制引脚GPIO 3
servo_pin = Pin(3)
servo = PWM(servo_pin)
#蜂鸣器控制引脚GPIO12
buzzer = PWM(Pin(12))
# 设置PWM频率为50Hz(标准舵机频率)
servo.freq(50)
# 等待Sengo1完成操作系统的初始化。此等待时间不可去掉,避免出现Sengo1尚未初始化完毕主控器已经开发发送指令的情况
time.sleep(3)
# 选择UART或者I2C通讯模式,Sengo1出厂默认为I2C模式,短按模式按键可以切换
# 4种UART通讯模式:UART9600(标准协议指令),UART57600(标准协议指令),UART115200(标准协议指令),Simple9600(简单协议指令),
#########################################################################################################
# port = UART(2,rx=Pin(16),tx=Pin(17),baudrate=9600)
port = I2C(0,scl=Pin(21),sda=Pin(20),freq=400000)
# Sengo1通讯地址:0x60。如果I2C总线挂接多个设备,请避免出现地址冲突
sengo1 = Sengo1(0x60)
err = sengo1.begin(port)
print("sengo1.begin: 0x%x"% err)
# 正常使用时,应由主控器发送指令控制Sengo1算法的开启与关闭,而非通过摇杆手动进行操作;
err = sengo1.VisionBegin(sengo1_vision_e.kVisionBody)
print("sengo1.VisionBegin(sengo1_vision_e.kVisionBody):0x%x"% err)
def tone(pin, frequency, duration):
"""Play the sound of the specified frequency"""
if frequency > 0:
pin.freq(frequency)
pin.duty_u16(32768) # 50% duty cycle
time.sleep_ms(duration)
pin.duty_u16(0) # stop play tone
def no_tone(pin):
"""no tone"""
pin.duty_u16(0)
def countdown(seconds):
"""countdown sound"""
for i in range(seconds, 0, -1):
# The ticking of the countdown
tone(buzzer, 800, 100)
time.sleep_ms(200)
no_tone(buzzer)
# Interval time
time.sleep_ms(500)
# 定义舵机角度到占空比的转换函数
def set_servo_angle(angle):
# 确保角度在0-270度范围内
if angle < 0:
angle = 0
elif angle > 270:
angle = 270
# 将角度转换为占空比
# 对于270度舵机,通常0.5ms脉冲对应0度,2.5ms脉冲对应270度
min_duty = 1638 # 0.5ms的占空比值 (0.5/20 * 65535)
max_duty = 8192 # 2.5ms的占空比值 (2.5/20 * 65535)
# 计算对应角度的占空比
duty = int(min_duty + (max_duty - min_duty) * angle / 270)
servo.duty_u16(duty)
while True:
# Sengo不主动返回检测识别结果,需要主控板发送指令进行读取。读取的流程:首先读取识别结果的数量,接收到指令后,Sengo1会刷新结果数据,如果结果数量不为零,那么主控再发送指令读取结果的相关信息。请务必按此流程构建程序。
obj_num = (sengo1.GetValue(sengo1_vision_e.kVisionBody, sentry_obj_info_e.kStatus))
#判断是否检测到人体
if obj_num:
#投掷前倒计时声音,三声
countdown(3)
#投掷
set_servo_angle(90)
time.sleep(1)
#缓慢的回落投掷臂
for j in range(90,0,-1):
set_servo_angle(j)
time.sleep(0.01)
5.5.5 代码结果#
上传代码成功后,AI视觉模块会开启“人体识别”模式然后对拍到的画面进行识别,判断是否有检测到人体,如果有则进行投掷,投掷前会有三声倒计时提示音倒计时结束就会进行投掷,投掷完成后投掷臂会慢慢的回落等待下一次投掷。这样就完成了一个防盗装置。