5.3 色块追踪小车#
5.3.1 简介#
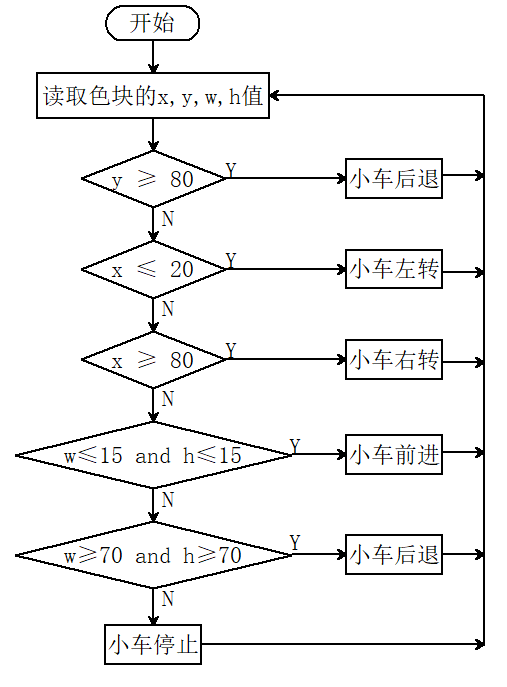
色块追踪小车,AI视觉模块对色块进行锁定并且根据AI视觉模块给出的色块XY以及宽高进行左右前后的跟踪。
5.3.2 流程图#
5.3.3 代码#
from machine import I2C, Pin, PWM
import time
import random
from Sengo1 import *
# 等待Sengo1初始化 (重要!)
time.sleep(3)
# 初始化I2C (根据实际接线调整引脚)
port = I2C(0, scl=Pin(21), sda=Pin(20), freq=400000) # 使用参考代码中的引脚
# 创建Sengo1对象
sengo1 = Sengo1(0x60)
# 开始传感器
err = sengo1.begin(port)
if err != SENTRY_OK:
print(f"Initialization failed,error code:{err}")
else:
print("Initialization succeeded")
sengo1.SetParam(sengo1_vision_e.kVisionBlob,[0, 0, 6, 8, color_label_e.kColorRed], 1) #红色
# 等待新参数生效后的识别结果产出,该时间间隔不得低于该算法识别1帧所花费的时间,可以通过算法开启后,屏幕下方的帧率进行推算
time.sleep(0.1)
#正常使用时,应由主控板发送指令控制Sengo1的算法开启关闭,而不是通过Sengo1的摇杆进行操作;
err = sengo1.VisionBegin(sengo1_vision_e.kVisionBlob)
if err != SENTRY_OK:
print(f"Starting algo Blob failed,error code:{err}")
else:
print("Starting algo Blob succeeded")
# right wheel
pin1=Pin(14,Pin.OUT)
pin2=PWM(Pin(16))
pin2.freq(50)
# left wheel
pin3=Pin(15,Pin.OUT)
pin4=PWM(Pin(17))
pin4.freq(50)
# As a function of the car going forward.
def car_forward():
pin1.value(0)
pin2.duty_u16(20000)
pin3.value(0)
pin4.duty_u16(20000)
# As a function of the car going backwards.
def car_back():
pin1.value(1)
pin2.duty_u16(30000)
pin3.value(1)
pin4.duty_u16(30000)
# As a function of the car going left.
def car_left():
pin1.value(0)
pin2.duty_u16(5000)
pin3.value(1)
pin4.duty_u16(45000)
# As a function of the car going right.
def car_right():
pin1.value(1)
pin2.duty_u16(45000)
pin3.value(0)
pin4.duty_u16(5000)
# As a function of the car stopping.
def car_stop():
pin1.value(0)
pin2.duty_u16(0)
pin3.value(0)
pin4.duty_u16(0)
# 主检测循环
try:
while True:
# 获取检测到的色块数量
obj_num = sengo1.GetValue(sengo1_vision_e.kVisionBlob,sentry_obj_info_e.kStatus)
if obj_num:
# 获取位置与大小
x = sengo1.GetValue(sengo1_vision_e.kVisionBlob,sentry_obj_info_e.kXValue,1)
y = sengo1.GetValue(sengo1_vision_e.kVisionBlob,sentry_obj_info_e.kYValue,1)
w = sengo1.GetValue(sengo1_vision_e.kVisionBlob,sentry_obj_info_e.kWidthValue,1)
h = sengo1.GetValue(sengo1_vision_e.kVisionBlob,sentry_obj_info_e.kHeightValue,1)
if y >= 80:
#小车后退
car_back()
elif x <= 20:
#小车左转
car_left()
elif x >= 80:
#小车右转
car_right()
elif w <= 15 and h <= 15:
#小车前进
car_forward()
elif w >= 70 and h >= 70:
#小车后退
car_back()
else:
car_stop()
else: car_stop()
time.sleep(0.1) # 短暂延时
except KeyboardInterrupt:
sengo1.VisionEnd(sengo1_vision_e.kVisionBlob)
print("The program has stopped")
5.3.4 代码结果#
上传代码成功后,AI视觉模块会对拍到的画面进行识别,判断是否有红色块,如果有红色块便从这个色块的x,y,w,h值上判断小车的动作,比如红色块靠显示屏的右边小车便往右边转动,红色快靠左小车就往左边转到,红色快靠下小车就后退。(使用我们提供的颜色卡片)