5.5 智能投石车#
5.5.1 简介#
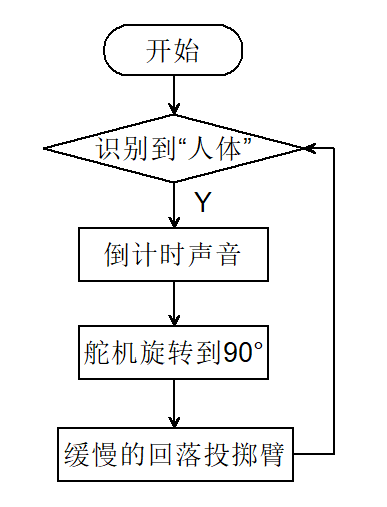
使用AI视觉模块搭配小车的投石攻城车造型,制作出有趣的自动识别投石器,先将AI视觉模块固定到投石器小车上,然后使用AI模块进行识别如果识别到了人体就蜂鸣器开始倒计时3声然后投掷,投掷结束后缓慢落下投掷臂等待下一次识别到人体后投掷。
5.5.2 将AI模块安装到投石小车上#
注意:你需要先按照小车教程将`投石攻城车`的乐高搭建好,然后再按照下方的安装教程进行安装。
所需配件
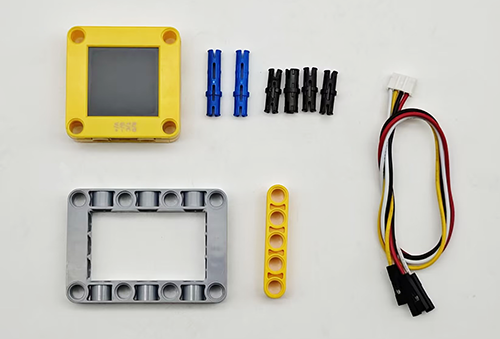
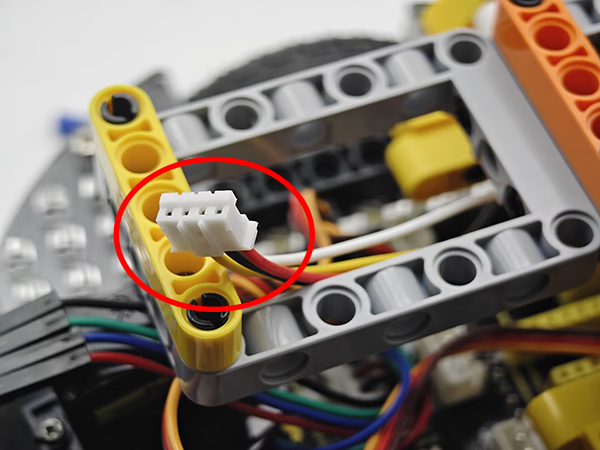
步骤1:
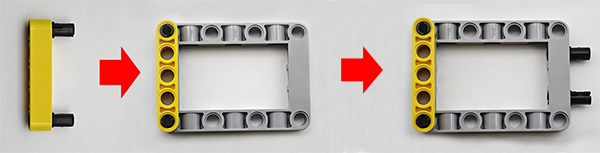
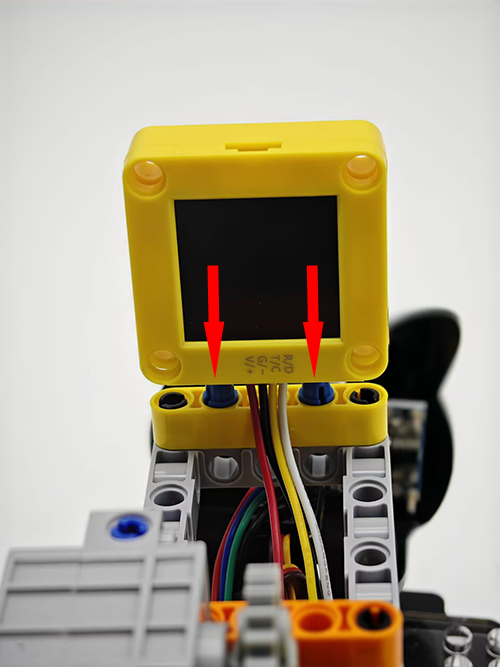
步骤2:
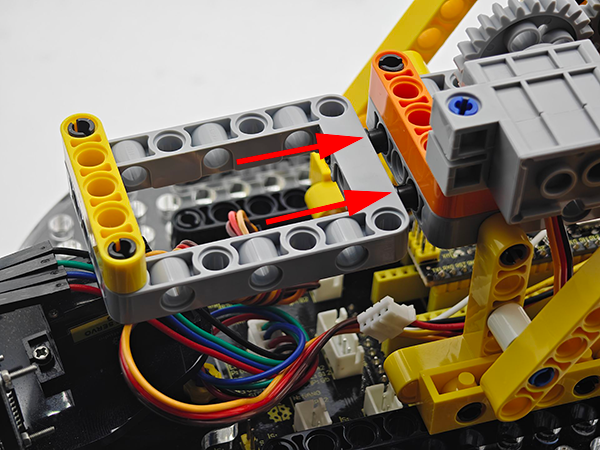
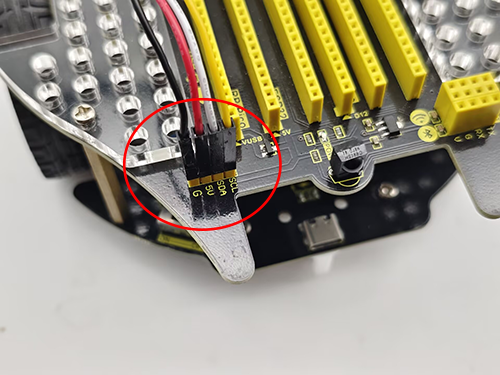
步骤3:
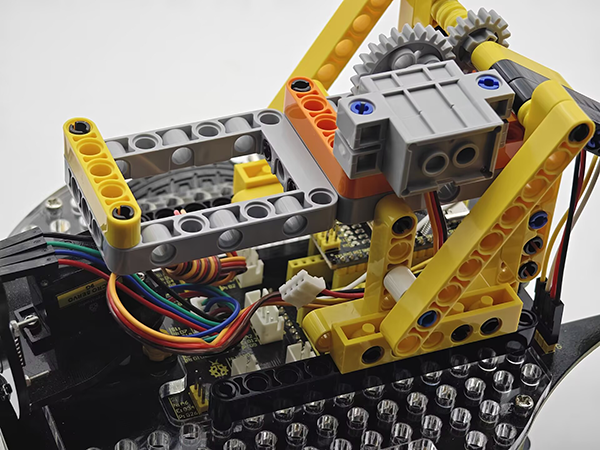
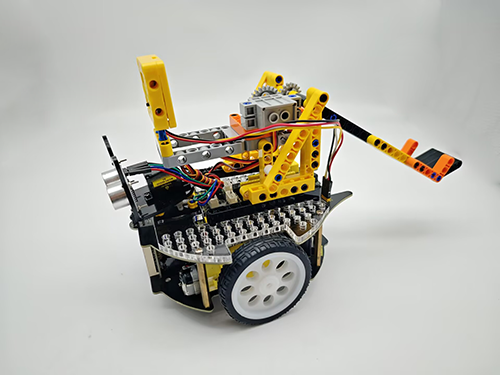
步骤4:
AI视觉模块 |
小车接口 |
|---|---|
T/C (黄色线) |
SCL |
R/D (白色线) |
SDA |
V/+ (红色线) |
5V |
G/- (黑色线) |
G |
完整展示:
5.5.3 流程图#
5.5.4 代码#
#include <Arduino.h> // Arduino 核心库
#include <Sentry.h> // Sengo 视觉传感器库
//引入 Servo 舵机控制库
#include <Servo.h>
Servo servo; //创建伺服对象以控制伺服系统
#define BUZZER_PIN 3 //蜂鸣器引脚
// 类型定义,将 Sengo1 类型重命名为 Sengo,方便后续使用
typedef Sengo1 Sengo;
// 通信接口选择(二选一)
#define SENGO_I2C // 使用 I2C 通信
// #define SENGO_UART // 使用 UART 通信(当前被注释掉)
// 根据选择的通信方式包含相应的库
#ifdef SENGO_I2C
#include <Wire.h> // Arduino I2C 库
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // 软件串口库(用于非硬件串口)
#define TX_PIN 11 // 定义软件串口发送引脚
#define RX_PIN 10 // 定义软件串口接收引脚
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 创建软件串口对象
#endif
// 定义视觉识别类型为人体检测
#define VISION_TYPE Sengo::kVisionBody
Sengo sengo; // 创建 Sengo 传感器对象
// 初始化函数 - 在设备启动时运行一次
void setup() {
sentry_err_t err = SENTRY_OK; // 定义错误变量,初始化为无错误
// 初始化串口通信,用于与电脑通信输出调试信息
Serial.begin(9600);
Serial.println("Waiting for sengo initialize...");
// 根据选择的通信方式初始化传感器
#ifdef SENGO_I2C
Wire.begin(); // 初始化 I2C 总线
// 尝试初始化传感器,直到成功为止
while (SENTRY_OK != sengo.begin(&Wire)) {
yield(); // 在等待期间让出 CPU 时间,防止看门狗复位
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // 初始化软件串口
// 尝试初始化传感器,直到成功为止
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // 传感器初始化成功
// 设置视觉识别模式为人体检测
err = sengo.VisionBegin(VISION_TYPE);
Serial.print("sengo.VisionBegin(kVisionBody) ");
// 检查设置是否成功并输出结果
if (err) {
Serial.print("Error: 0x");
} else {
Serial.print("Success: 0x");
}
Serial.println(err, HEX); // 以十六进制格式输出错误代码
//舵机角度初始化
servo.attach(A0);
servo.write(35);
//设置引脚为输出模式
pinMode(BUZZER_PIN, OUTPUT);
}
// 主循环函数 - 在初始化后重复运行
void loop() {
// 获取检测到的人体数量
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
if (obj_num) { // 如果检测到物体
//投掷倒计时声音
countdown(3);
//投掷
servo.write(90);
delay(1000);
//缓慢回落
for (int j = 90; j > 35; j--) {
servo.write(j);
delay(15);
}
delay(500);
}
}
void countdown(int seconds) {
for (int i = seconds; i > 0; i--) {
// 倒计时滴答声
tone(BUZZER_PIN, 800, 100);
delay(200);
noTone(BUZZER_PIN);
// 间隔时间
delay(800);
}
}
5.5.5 代码结果#
上传代码成功后,AI视觉模块会开启“人体识别”模式然后对拍到的画面进行识别,判断是否有检测到人体,如果有则进行投掷,投掷前会有三声倒计时提示音倒计时结束就会进行投掷,投掷完成后投掷臂会慢慢的回落等待下一次投掷。这样就实现了一个防盗保护了。