4.1 识别颜色#
4.1.1 算法简介#
指定一个识别区域,其位置和大小可根据需要进行设置,返回该区域的颜色标签以及红色分量值R、绿色分量值G与蓝色分量值B。
4.1.2 颜色分类标签#
Sengo1定义了7 种颜色的分类标签:
标签值 |
含义 |
标签值 |
含义 |
|---|---|---|---|
1(kColorBlack) |
黑色 |
2(kColorWhite) |
白色 |
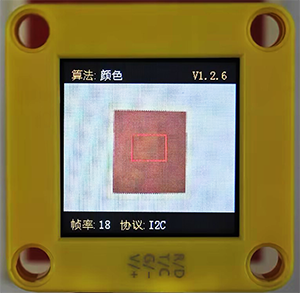
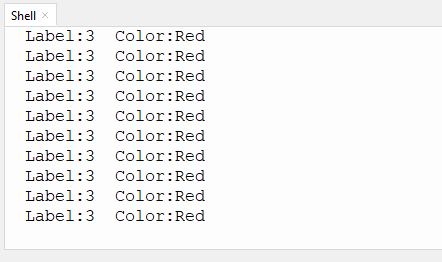
3(kColorRed) |
红色 |
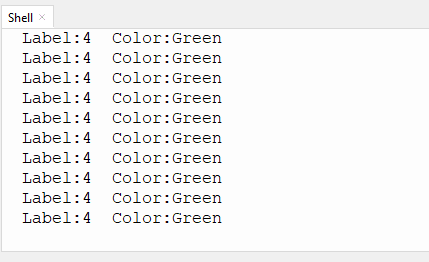
4(kColorGreen) |
绿色 |
5(kColorBlue) |
蓝色 |
6(kColorYellow) |
黄色 |
注:不在表格中的常见的颜色如紫色、青色(蓝绿色)、橙色、灰色等,其颜色区分度较低,容易误识别为表格中的颜色。如若需要识别以上颜色,可根据返回的RGB分量值自行进行判定。
示例1:
串口标签值输出为:
示例2:
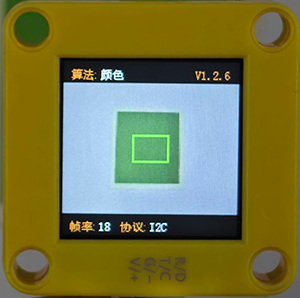
串口标签值输出为:
4.1.3 配置参数#
用户可指定识别区域坐标和识别框的大小,参数定义如下:
参数 |
含义 |
|---|---|
1(x) |
识别区域中心横坐标x |
2(y) |
识别区域中心纵坐标y |
3(w) |
识别区域宽度w |
4(h) |
识别区域高度h |
5 |
无 |
代码:sengo1.SetParam(sengo1_vision_e.kVisionColor,[x, y, w, h, 1])
# 3、Sengo1图像的长宽比为4:3,当宽高值设为3:4时,识别区域为正方形;当宽高值设为1:1时,识别区域为长方形
sengo1.SetParam(sengo1_vision_e.kVisionColor,[50, 50, 3, 4, 1])
4.1.4 返回数据#
主控器获取检测结果时,算法会返回以下数据:
形参 |
含义 |
|---|---|
kRValue |
红色分量值R,范围0-255 |
kGValue |
绿色分量值G,范围0-255 |
kBValue |
蓝色分量值B,范围0-255 |
kLabel |
颜色分类标签 |
代码:
#读取颜色标签值
label = sengo1.GetValue(sengo1_vision_e.kVisionColor,sentry_obj_info_e.kLabel)
4.1.6 识别颜色算法使用技巧#
当识别区域较小时,譬如2x2,虽然识别速度快,但因像素点过少,结果易被干扰,其可信度较低,只适用于背景单一可控的应用场合;
当识别区域较大时,譬如20x20,因像素点多,区域内杂色的干扰被会滤除,结果具有较高的可信度,但识别速度慢;
当识别区域内不同颜色的面积相当时,结果可能会反复跳变;
4.1.7 代码#
from machine import I2C,UART,Pin
from Sengo1 import *
import time
import random
color_Name = [" ","Black","Whiet","Red","Green","Blue","Yellow"]
# 等待Sengo1完成操作系统的初始化。此等待时间不可去掉,避免出现Sengo1尚未初始化完毕主控器已经开发发送指令的情况
time.sleep(3)
# 选择UART或者I2C通讯模式,Sengo1出厂默认为I2C模式,短按模式按键可以切换
# 4种UART通讯模式:UART9600(标准协议指令),UART57600(标准协议指令),UART115200(标准协议指令),Simple9600(简单协议指令),
# port = UART(2,rx=Pin(16),tx=Pin(17),baudrate=9600)
port = I2C(0,scl=Pin(21),sda=Pin(20),freq=400000)
# Sengo1通讯地址:0x60。如果I2C总线挂接多个设备,请避免出现地址冲突
sengo1 = Sengo1(0x60)
err = sengo1.begin(port)
if err != SENTRY_OK:
print(f"Initialization failed,error code:{err}")
else:
print("Initialization succeeded")
# 1、算法的默认参数设置,如无需更改参数,则可移除本代码块;
# 2、只有颜色识别与色块检测两种算法需要设置参数;
# 3、Sengo1图像的长宽比为4:3,当宽高值设为3:4时,识别区域为正方形;当宽高值设为1:1时,识别区域为长方形
sengo1.SetParam(sengo1_vision_e.kVisionColor,[50, 50, 3, 4, 1])
time.sleep(0.1)
#Sengo1每次只能运行一种识别算法;
err = sengo1.VisionBegin(sengo1_vision_e.kVisionColor)
if err != SENTRY_OK:
print(f"Starting algo Color failed,error code:{err}")
else:
print("Starting algo Color succeeded")
while True:
# Sengo1不主动返回检测识别结果,需要主控板发送指令进行读取。读取的流程:首先读取识别结果的数量,接收到指令后,Sengo1会刷新结果数据,如果结果数量不为零,那么主控再发送指令读取结果的相关信息。请务必按此流程构建程序。
# Sengo最多输出1个识别结果。
obj_num = (sengo1.GetValue(sengo1_vision_e.kVisionColor, sentry_obj_info_e.kStatus))
if obj_num:
#读取颜色标签值
label = sengo1.GetValue(sengo1_vision_e.kVisionColor,sentry_obj_info_e.kLabel)
#输出标签值与颜色名称
print(f"Label:{label} Color:{color_Name[label]}")
time.sleep(0.2)
4.1.8 代码结果#
上传代码后,AI视觉模块上将识别框对准要识别的颜色,识别框便会变成与要识别的颜色一样的颜色,然后通过串口监视器打印识别到颜色的标签值与名称。