5.1 人脸解锁#
5.1.1 简介#
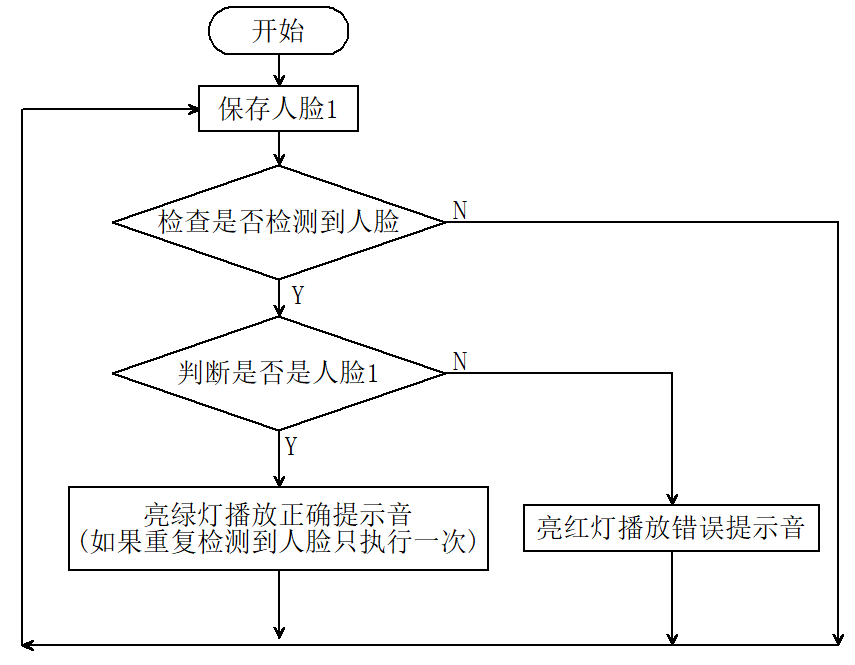
人脸识别解锁,判断是否是存储好的人脸,是则播放正确提示音亮绿灯,不是则播放错误提示音亮红灯。通过长按AI视觉模块的功能按键进行训练并存储人脸,然后通过代码对该人脸进行判断。
5.1.2 代码流程图#
5.1.3 代码#
#include <Arduino.h> // Arduino核心库
#include <Sentry.h> // Sentry机器视觉传感器库
#include <Wire.h> // I2C通信所需库
#include <Adafruit_NeoPixel.h>
#define PIN A3
Adafruit_NeoPixel strip = Adafruit_NeoPixel(4, PIN, NEO_GRB + NEO_KHZ800);
// 为Sengo2类型创建别名"Sengo",简化后续使用
typedef Sengo2 Sengo;
// 定义通信方式(当前启用I2C)
#define SENGO_I2C
// #define SENGO_UART // UART串口通信方案(已注释禁用)
// 根据选择的通信方式包含相应库
#ifdef SENGO_I2C
#include <Wire.h> // I2C通信所需库
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // 软串口库
#define TX_PIN 11 // 自定义TX引脚号
#define RX_PIN 10 // 自定义RX引脚号
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 创建软串口对象
#endif
#define speakerPin 3 //扬声器引脚
// 全局状态变量
unsigned long lastDetectionTime = 0; // 最后检测到人脸的时间戳
const unsigned long disappearDelay = 5000; // 人脸消失延迟时间(5秒)
bool currentFaceDetected = false; // 是否检测到人脸1
// 定义视觉处理类型为人脸检测模式
#define VISION_TYPE Sengo::kVisionFace
// 创建Sengo传感器对象实例
Sengo sengo;
// 正确提示音(清脆的两短音)
void playSuccessSound() {
for (int i = 0; i < 2; i++) {
tone(speakerPin, 1500); // 1500Hz高频
delay(100);
noTone(speakerPin);
delay(50); // 短音之间的间隔
}
}
// 错误提示音(低沉的单长音)
void playErrorSound() {
tone(speakerPin, 300); // 300Hz低频
delay(500);
noTone(speakerPin);
}
// Fill the dots one after the other with a color
void colorWipe(uint32_t c, uint8_t wait) {
for (uint16_t i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
}
void setup() {
sentry_err_t err = SENTRY_OK; // 定义错误状态变量,初始化为无错误
Serial.begin(9600); // 初始化串口通信,波特率9600
Serial.println("Waiting for sengo initialize..."); // 打印初始化提示
// 根据选择的通信方式初始化传感器
#ifdef SENGO_I2C
Wire.begin(); // 初始化I2C总线
// 循环尝试连接传感器,直到成功
// yield()函数在等待期间允许ESP8266/ESP32处理后台任务
while (SENTRY_OK != sengo.begin(&Wire)) {
yield();
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // 初始化软串口,波特率9600
// 循环尝试连接传感器,直到成功
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // 打印传感器初始化成功信息
// 启动人脸检测功能
err = sengo.VisionBegin(VISION_TYPE);
// 打印人脸检测初始化结果
Serial.print("sengo.VisionBegin(kVisionFace) ");
if (err) {
Serial.print("Error: 0x"); // 如果出错,打印错误前缀
} else {
Serial.print("Success: 0x"); // 如果成功,打印成功前缀
}
Serial.println(err, HEX); // 以16进制格式打印错误代码
strip.begin();
strip.show(); // Initialize all pixels to 'off'
}
void loop() {
// 获取检测到的人脸数量
int face_count = sengo.GetValue(VISION_TYPE, kStatus);
unsigned long currentMillis = millis();
// 检查是否有人脸1
if (face_count > 0) {
for (int i = 1; i <= face_count; ++i) {
int current_face_id = sengo.GetValue(VISION_TYPE, kLabel, i);
Serial.println(current_face_id);
if (current_face_id == 1 && !currentFaceDetected) {
lastDetectionTime = currentMillis; // 更新最后检测时间
currentFaceDetected = true;
colorWipe(strip.Color(0, 255, 0), 50); // 亮绿灯
playSuccessSound(); // 播放正确音
colorWipe(strip.Color(0, 0, 0), 50); // 关闭灯光
} else if (current_face_id == 0 || current_face_id == 200) {
colorWipe(strip.Color(255, 0, 0), 50); // 亮红灯
playErrorSound(); // 播放错误音
colorWipe(strip.Color(0, 0, 0), 50); // 关闭灯光
}
}
}
//5秒延时代码
if (currentFaceDetected && (currentMillis - lastDetectionTime >= disappearDelay)) {
currentFaceDetected = false; // 退出激活状态
}
delay(300);
}
5.1.4 代码结果#
上传代码成功后,AI视觉模块就会对摄像头拍到的画面进行人脸识别,如果画面中出现人脸则将这个人脸与我们保存的标签号为"1"的人脸进行对比,从而判断是不是标签号为"1"的人脸, 是则小车发出正确提示音并且亮绿灯,不是则小车发出错误提示音并且亮红灯。