4.5 卡片识别#
4.5.1 算法简介#
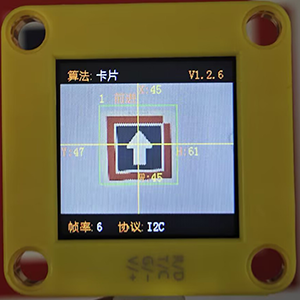
识别图像中是否有配套的交通卡片,返回卡片的坐标、大小、分类标签等信息。
4.5.2 卡片分类标签#
分类标签 |
含义 |
图片 |
|---|---|---|
1 |
前进 |
|
2 |
左转 |
|
3 |
右转 |
|
4 |
掉头 |
|
5 |
停车 |
|





注意:算法只支持单张卡片的识别。在一定的旋转角、偏转角与俯仰角内卡片仍然可以被识别,使用时请尽量正对卡片以期获得较好的识别效果。
4.5.3 返回数据#
主控器获取识别结果时,算法会返回以下数据:
参数 |
含义 |
|---|---|
kXValue |
卡片中心横坐标x |
kYValue |
卡片中心纵坐标y |
kWidthValue |
卡片宽度w |
kHeightValue |
卡片高度h |
kLabel |
卡片分类标签 |
代码:
// 遍历所有检测到的卡片
for (int i = 1; i <= obj_num; ++i) {
// 获取卡片在图像中的位置和尺寸信息
int x = sengo.GetValue(VISION_TYPE, kXValue, i); // 卡片中心X坐标
int y = sengo.GetValue(VISION_TYPE, kYValue, i); // 卡片中心Y坐标
int w = sengo.GetValue(VISION_TYPE, kWidthValue, i); // 卡片宽度
int h = sengo.GetValue(VISION_TYPE, kHeightValue, i); // 卡片高度
// 获取卡片类型标签(对应card_classes数组索引)
int card_type = sengo.GetValue(VISION_TYPE, kLabel, i);
// 确保卡片类型在有效范围内(防止数组越界)
if (card_type < 0) card_type = 0;
if (card_type >= sizeof(card_classes)/sizeof(card_classes[0]))
card_type = 0;
// 打印卡片详细信息
Serial.print(" Card #");
Serial.print(i);
Serial.print(": ");
Serial.print("Position=(");
Serial.print(x);
Serial.print(",");
Serial.print(y);
Serial.print("), Size=");
Serial.print(w);
Serial.print("x");
Serial.print(h);
Serial.print(", Type=");
Serial.println(card_classes[card_type]); // 使用映射表获取类型名称
}
4.5.4 代码#
#include <Arduino.h> // Arduino核心库
#include <Sentry.h> // Sentry机器视觉传感器库
// 为Sengo1类型创建别名"Sengo",简化后续使用
typedef Sengo1 Sengo;
// 定义通信方式(当前启用I2C)
#define SENGO_I2C
// #define SENGO_UART // UART串口通信方案(已注释禁用)
// 根据选择的通信方式包含相应库
#ifdef SENGO_I2C
#include <Wire.h> // I2C通信所需库
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // 软串口库
#define TX_PIN 11 // 自定义TX引脚号
#define RX_PIN 10 // 自定义RX引脚号
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 创建软串口对象
#endif
// 定义视觉处理类型为卡片识别模式
#define VISION_TYPE Sengo::kVisionCard
// 创建Sengo传感器对象实例
Sengo sengo;
// 卡片类型名称映射表(索引对应卡片标签值)
const char* card_classes[] = {
"unknown", // 0: 未知卡片类型
"forward", // 1: 前进卡片
"left", // 2: 左转卡片
"right", // 3: 右转卡片
"turn_around", // 4: 掉头卡片
"park", // 5: 停车卡片
// 注意:数组大小应与实际卡片类型数量匹配
};
void setup() {
sentry_err_t err = SENTRY_OK; // 定义错误状态变量,初始化为无错误
Serial.begin(9600); // 初始化串口通信,波特率9600
Serial.println("Waiting for sengo initialize..."); // 打印初始化提示
// 根据选择的通信方式初始化传感器
#ifdef SENGO_I2C
Wire.begin(); // 初始化I2C总线
// 循环尝试连接传感器,直到成功
while (SENTRY_OK != sengo.begin(&Wire)) {
yield(); // 在等待连接期间允许系统处理其他任务
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // 初始化软串口,波特率9600
// 循环尝试连接传感器,直到成功
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield(); // 在等待连接期间允许系统处理其他任务
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // 打印传感器初始化成功信息
// 启动卡片视觉识别功能
err = sengo.VisionBegin(VISION_TYPE);
// 打印视觉识别初始化结果
Serial.print("sengo.VisionBegin(kVisionCard) ");
if (err) {
Serial.print("Error: 0x"); // 如果出错,打印错误前缀
} else {
Serial.print("Success: 0x"); // 如果成功,打印成功前缀
}
Serial.println(err, HEX); // 以16进制格式打印错误代码
}
void loop() {
// 获取是否检测到的卡片
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
// 如果检测到至少一张卡片
if (obj_num > 0) {
// 打印检测到的卡片数
Serial.print("Totally ");
Serial.print(obj_num);
Serial.println(" cards detected");
// 遍历所有检测到的卡片
for (int i = 1; i <= obj_num; ++i) {
// 获取卡片在图像中的位置和尺寸信息
int x = sengo.GetValue(VISION_TYPE, kXValue, i); // 卡片中心X坐标
int y = sengo.GetValue(VISION_TYPE, kYValue, i); // 卡片中心Y坐标
int w = sengo.GetValue(VISION_TYPE, kWidthValue, i); // 卡片宽度
int h = sengo.GetValue(VISION_TYPE, kHeightValue, i); // 卡片高度
// 获取卡片类型标签(对应card_classes数组索引)
int card_type = sengo.GetValue(VISION_TYPE, kLabel, i);
// 确保卡片类型在有效范围内(防止数组越界)
if (card_type < 0) card_type = 0;
if (card_type >= sizeof(card_classes)/sizeof(card_classes[0]))
card_type = 0;
// 打印卡片详细信息
Serial.print(" Card #");
Serial.print(i);
Serial.print(": ");
Serial.print("Position=(");
Serial.print(x);
Serial.print(",");
Serial.print(y);
Serial.print("), Size=");
Serial.print(w);
Serial.print("x");
Serial.print(h);
Serial.print(", Type=");
Serial.println(card_classes[card_type]); // 使用映射表获取类型名称
}
}
delay(200);
}
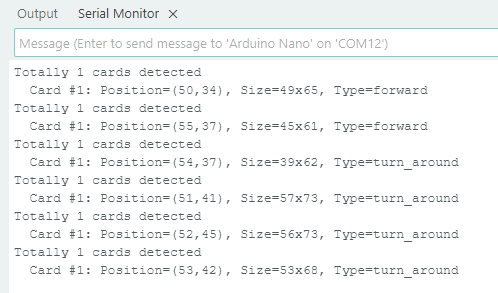
4.5.5 代码结果#
上传代码后,AI视觉模块将会对摄像头拍到的地方进行分析如果有卡片就会进行识别,并且在串口监视器中打印卡片的类型(前进,掉头,左转,右转,停止)。