4.7 人脸识别#
4.7.1 算法简介#

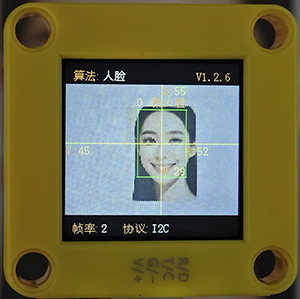
判断图像中是否有人脸及识别人脸,用户可通过功能按键训练存储或删除人脸数据,Sengo1可以存储10张人脸数据。
4.7.2 人脸分类标签#
Sengo1定义了11个人脸的分类标签::
分类标签 |
含义 |
分类标签 |
含义 |
|---|---|---|---|
0 |
新人脸 |
1-10 |
存储的人脸分类编号 |
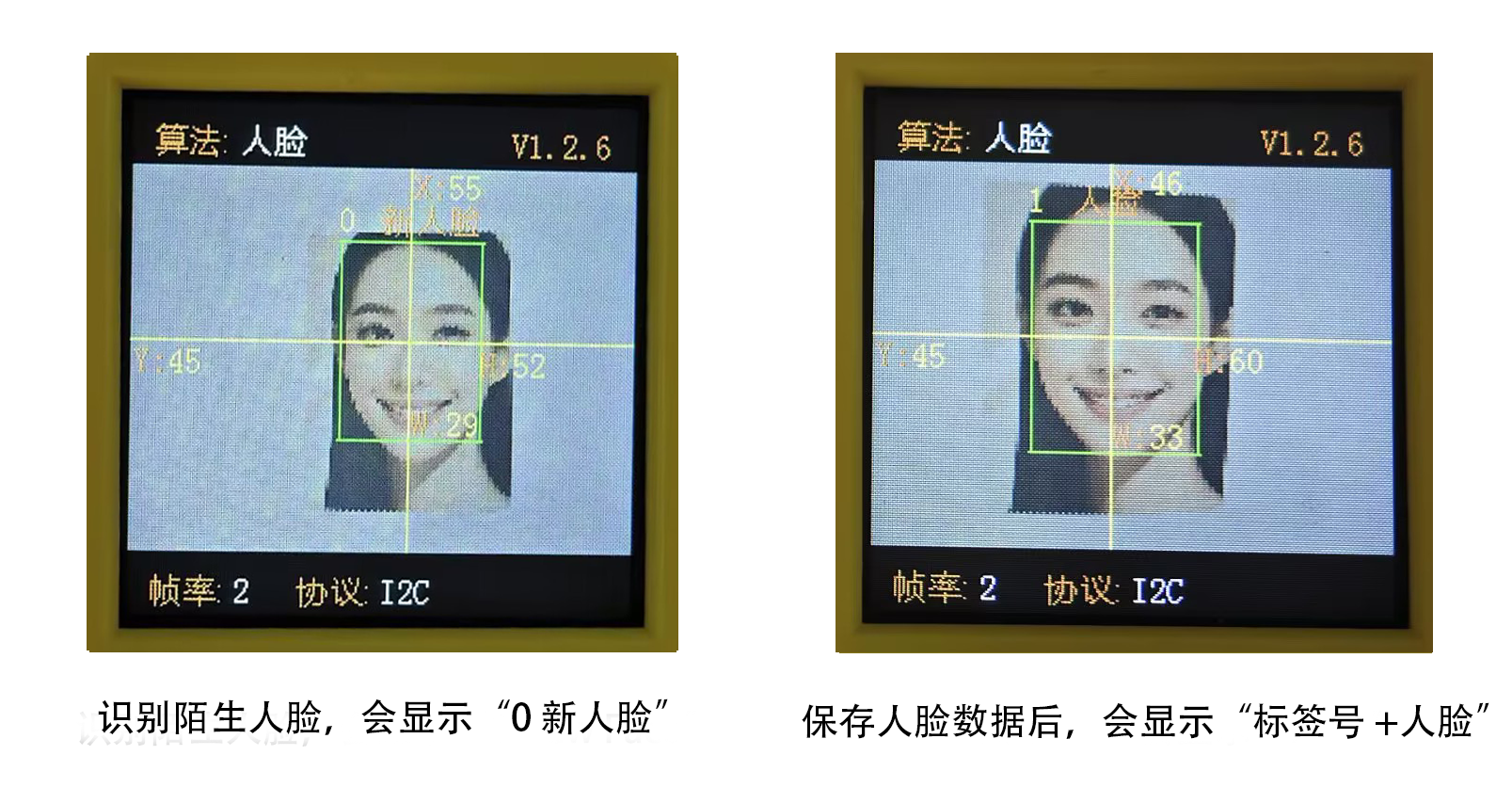
新人脸(标签 0):
存储的人脸(标签 1-10)
4.7.3 保存人脸数据#
开启人脸识别算法后,将摄像头正对人脸,按下功能按键约5秒后松开,Sengo1开始训练人脸,约3帧数据后,图像中当前的人脸数据会保存在Flash中,并分配一个人脸ID编号。
人脸数据的编号即标签值的分配原则:当前可用编号中最小的号。如果无空余编号,则Sengo1会提示保存失败。
4.7.4 删除人脸数据#
执行完毕人脸存储操作后,按下功能按键约10秒后松开,即可删除刚存储的人脸数据;再次按下10秒后,则会清空存储的全部人脸数据。若算法开启后未执行过人脸保存操作,则下功能按键10秒后会直接清空全部的人脸数据。
4.7.5 返回数据#
主控器获取识别结果时,算法会返回以下数据:
结果 |
含义 |
|---|---|
kXValue |
人脸中心横坐标x |
kYValue |
人脸中心纵坐标y |
kWidthValue |
人脸宽度w |
kHeightValue |
人脸高度h |
kLabel |
人脸分类标签 |
代码:
// 遍历所有检测到的人脸
for (int i = 1; i <= face_count; ++i) {
// 获取人脸在图像中的位置和尺寸信息
int face_x = sengo.GetValue(VISION_TYPE, kXValue, i); // 人脸区域中心X坐标
int face_y = sengo.GetValue(VISION_TYPE, kYValue, i); // 人脸区域中心Y坐标
int face_width = sengo.GetValue(VISION_TYPE, kWidthValue, i); // 人脸区域宽度
int face_height = sengo.GetValue(VISION_TYPE, kHeightValue, i); // 人脸区域高度
// 获取人脸标签(在人脸检测中通常表示人脸ID,用于追踪不同的人)
int face_id = sengo.GetValue(VISION_TYPE, kLabel, i);
// 打印人脸详细信息
Serial.print(" Face #");
Serial.print(i);
Serial.print(": ");
Serial.print("Position=(");
Serial.print(face_x);
Serial.print(",");
Serial.print(face_y);
Serial.print("), Size=");
Serial.print(face_width);
Serial.print("x");
Serial.print(face_height);
Serial.print(", ID=");
Serial.println(face_id);
}
4.7.6 使用技巧#
环境光线充足,正对人脸且完整的人脸在视野中较大时识别效果佳
佩戴眼镜、口罩或头发遮住面部时,会影响人脸检测效果
4.7.7 代码#
#include <Arduino.h> // Arduino核心库
#include <Sentry.h> // Sentry机器视觉传感器库
// 为Sengo1类型创建别名"Sengo",简化后续使用
typedef Sengo1 Sengo;
// 定义通信方式(当前启用I2C)
#define SENGO_I2C
// #define SENGO_UART // UART串口通信方案(已注释禁用)
// 根据选择的通信方式包含相应库
#ifdef SENGO_I2C
#include <Wire.h> // I2C通信所需库
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // 软串口库
#define TX_PIN 11 // 自定义TX引脚号
#define RX_PIN 10 // 自定义RX引脚号
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 创建软串口对象
#endif
// 定义视觉处理类型为人脸检测模式
#define VISION_TYPE Sengo::kVisionFace
// 创建Sengo传感器对象实例
Sengo sengo;
void setup() {
sentry_err_t err = SENTRY_OK; // 定义错误状态变量,初始化为无错误
Serial.begin(9600); // 初始化串口通信,波特率9600
Serial.println("Waiting for sengo initialize..."); // 打印初始化提示
// 根据选择的通信方式初始化传感器
#ifdef SENGO_I2C
Wire.begin(); // 初始化I2C总线
// 循环尝试连接传感器,直到成功
// yield()函数在等待期间允许ESP8266/ESP32处理后台任务
while (SENTRY_OK != sengo.begin(&Wire)) {
yield();
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // 初始化软串口,波特率9600
// 循环尝试连接传感器,直到成功
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // 打印传感器初始化成功信息
// 启动人脸检测功能
err = sengo.VisionBegin(VISION_TYPE);
// 打印人脸检测初始化结果
Serial.print("sengo.VisionBegin(kVisionFace) ");
if (err) {
Serial.print("Error: 0x"); // 如果出错,打印错误前缀
} else {
Serial.print("Success: 0x"); // 如果成功,打印成功前缀
}
Serial.println(err, HEX); // 以16进制格式打印错误代码
}
void loop() {
// 获取检测到的人脸
int face_count = sengo.GetValue(VISION_TYPE, kStatus);
// 如果检测到至少一个人脸
if (face_count > 0) {
// 打印检测到的人脸总数
Serial.print("Totally ");
Serial.print(face_count);
Serial.println(" faces detected");
// 遍历所有检测到的人脸
for (int i = 1; i <= face_count; ++i) {
// 获取人脸在图像中的位置和尺寸信息
int face_x = sengo.GetValue(VISION_TYPE, kXValue, i); // 人脸区域中心X坐标
int face_y = sengo.GetValue(VISION_TYPE, kYValue, i); // 人脸区域中心Y坐标
int face_width = sengo.GetValue(VISION_TYPE, kWidthValue, i); // 人脸区域宽度
int face_height = sengo.GetValue(VISION_TYPE, kHeightValue, i); // 人脸区域高度
// 获取人脸标签(在人脸检测中通常表示人脸ID,用于追踪不同的人)
int face_id = sengo.GetValue(VISION_TYPE, kLabel, i);
// 打印人脸详细信息
Serial.print(" Face #");
Serial.print(i);
Serial.print(": ");
Serial.print("Position=(");
Serial.print(face_x);
Serial.print(",");
Serial.print(face_y);
Serial.print("), Size=");
Serial.print(face_width);
Serial.print("x");
Serial.print(face_height);
Serial.print(", ID=");
Serial.println(face_id);
}
}
delay(200);
}
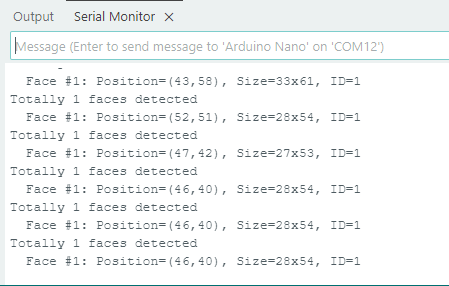
4.7.8 代码结果#
上传代码后,按住AI视觉模块后面的功能按键并保持5秒然后对准人脸等待一会学习完毕后就可以对物体进行识别了,当遇到新的人脸也是会提示的。