KE0163 Keyes Brick L298P 电机驱动扩展板 V1#
1. 介绍#
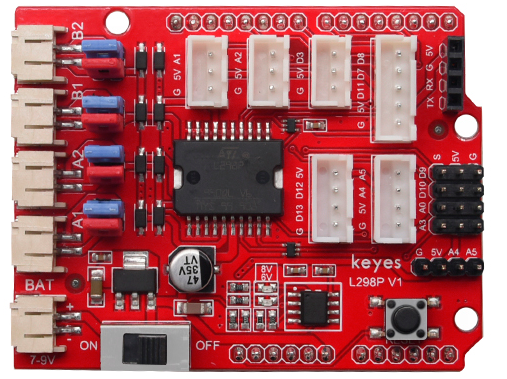
Keyes Brick L298P 电机驱动扩展板 是基于 L298P 驱动芯片设计的电机驱动扩展板,能够驱动直流电机和步进电机。该扩展板采用叠层设计,可以直接插接到 Arduino UNO R3 板上,简化了电机驱动的连接和控制过程。
2. 特点#
高功率驱动:支持最大 2A 的电流输出,适合驱动大功率电机。
多种接口:提供多种接口,方便连接不同类型的电机和传感器。
防反接设计:电源接口采用防反接设计,保护电路安全。
LED 指示灯:提供电源状态指示,便于调试和使用。
兼容性强:与市面上常用的蓝牙模块兼容,便于扩展功能。
3. 规格参数#
输入电压:DC 7-9V
逻辑部分工作电流:< 36mA
驱动部分工作电流:< 2A
最大耗散功率:25W(T=75℃)
控制信号输入电平:高电平 2.3V < Vin < 5V,低电平 -0.3V < Vin < 1.5V
工作温度:-25℃ ~ +130℃
尺寸:69mm × 53mm × 26mm
重量:25.2g
4. 工作原理#
L298P 驱动芯片通过控制输入信号来调节电机的转动方向和速度。扩展板上集成了必要的电路和接口,使得用户可以方便地连接电机和控制信号。通过 PWM 信号控制电机的转速,数字信号控制电机的正反转。
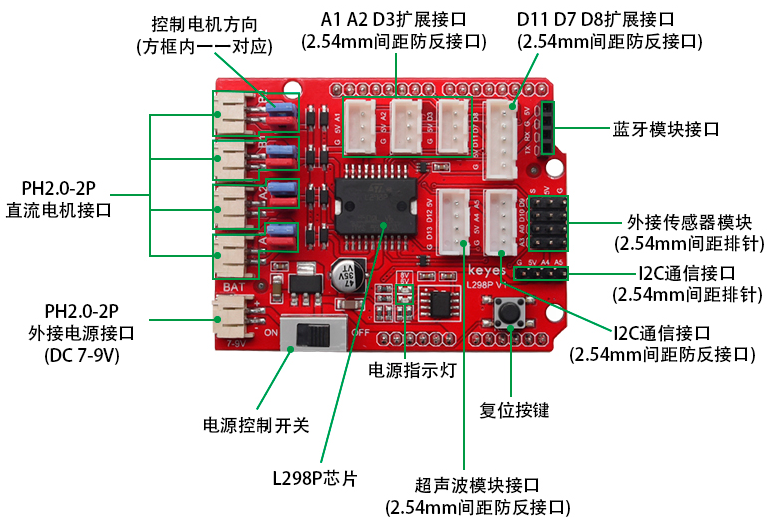
5. 接口说明#
电源接口:PH2.0-2P 防反接口,连接外部电源。
电机接口:可连接 4 个直流电机,支持并联控制。
LED 指示灯:
6V LED:外接电源低于 6.2V 时熄灭,高于 6.2V 时亮起。
8V LED:外接电源低于 8V 时熄灭,高于 8V 时亮起。
串口通讯接口:兼容 HC-06、HM-10 等蓝牙模块。
扩展接口:提供多个 XH-2.54mm 接口,方便连接传感器和其他模块。
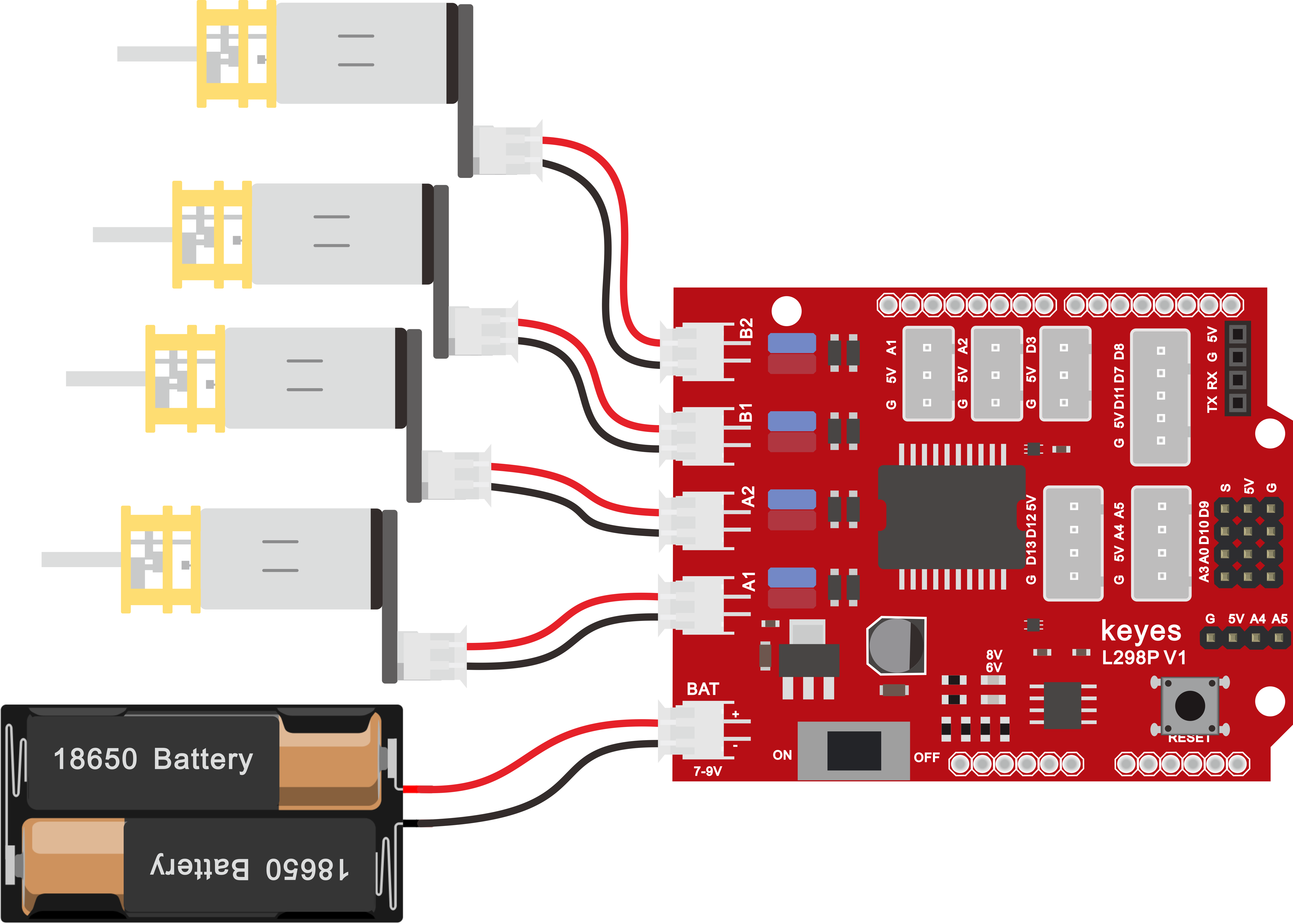
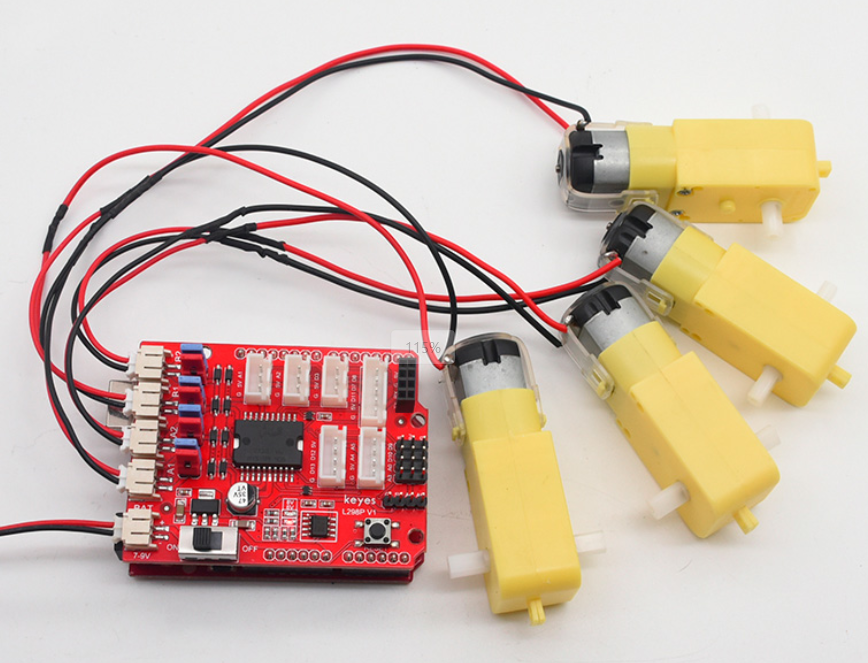
6. 连接图#
7. 示例代码#
以下是控制电机的示例代码:
// 电机控制脚
#define EN_L 5 // L298N使能 左电机使能
#define EN_R 6 // L298N使能 右电机使能
#define Motor_Right 2 // L298N IN2 右电机控制正反转
#define Motor_Left 4 // L298N IN3 左电机控制正反转
void setup()
{
pinMode(Motor_Right, OUTPUT);
pinMode(Motor_Left, OUTPUT);
pinMode(EN_L, OUTPUT);
pinMode(EN_R, OUTPUT);
}
// 小车前进
void advance()
{
analogWrite(EN_L, 200);
analogWrite(EN_R, 200);
digitalWrite(Motor_Right, HIGH);
digitalWrite(Motor_Left, HIGH);
}
// 小车后退
void back()
{
analogWrite(EN_L, 200);
analogWrite(EN_R, 200);
digitalWrite(Motor_Right, LOW);
digitalWrite(Motor_Left, LOW);
}
// 小车左旋转
void left()
{
analogWrite(EN_L, 200);
analogWrite(EN_R, 200);
digitalWrite(Motor_Right, HIGH);
digitalWrite(Motor_Left, LOW);
}
// 小车右旋转
void right()
{
analogWrite(EN_L, 200);
analogWrite(EN_R, 200);
digitalWrite(Motor_Right, LOW);
digitalWrite(Motor_Left, HIGH);
}
// 小车停止
void stopp()
{
analogWrite(EN_L, 0);
analogWrite(EN_R, 0);
}
void loop()
{
advance();
delay(1000);
stopp();
delay(200);
back();
delay(1000);
stopp();
delay(200);
left();
delay(1000);
stopp();
delay(200);
right();
delay(1000);
stopp();
delay(200);
}
8. 实验现象#
在 UNO R3 控制上传好测试代码后,将扩展板堆叠在 UNO R3 控制板,按照接线图接线,上电后,两个电机模拟小车运动转动,模拟小车前进 1 秒,停止 0.2 秒;后退 1 秒,停止 0.2 秒;左旋转 1 秒,停止 0.2 秒;右旋转 1 秒,停止 0.2 秒;循环交替。
9. 注意事项#
确保电源电压在规定范围内,避免损坏电路。
在连接电机时,注意电机的极性,避免反向连接。
使用 PWM 信号控制电机速度时,确保信号频率适当。
在调试过程中,注意观察 LED 指示灯状态,及时排查故障。
10. 参考链接#
如有更多疑问,请联系 Keyes 官方客服或加入相关创客社区交流。祝使用愉快!