项目三十六 舵机控制#
1.实验说明#
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
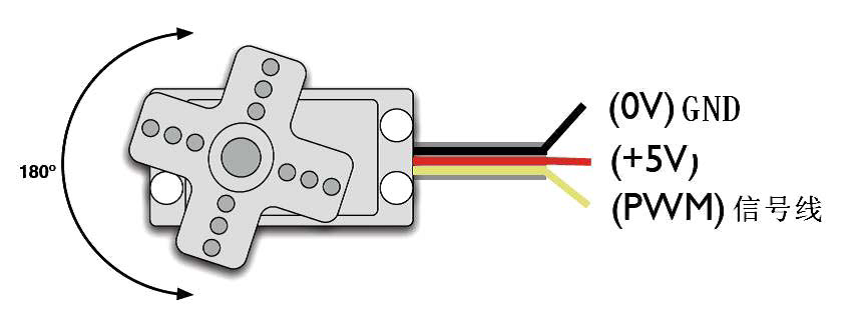
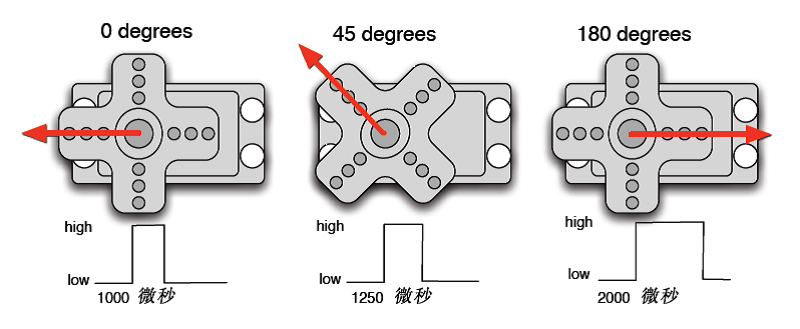
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
2.实验器材#
keyes 伺服舵机*1
keyes UNO R3开发板*1
传感器扩展板*1
USB线*1
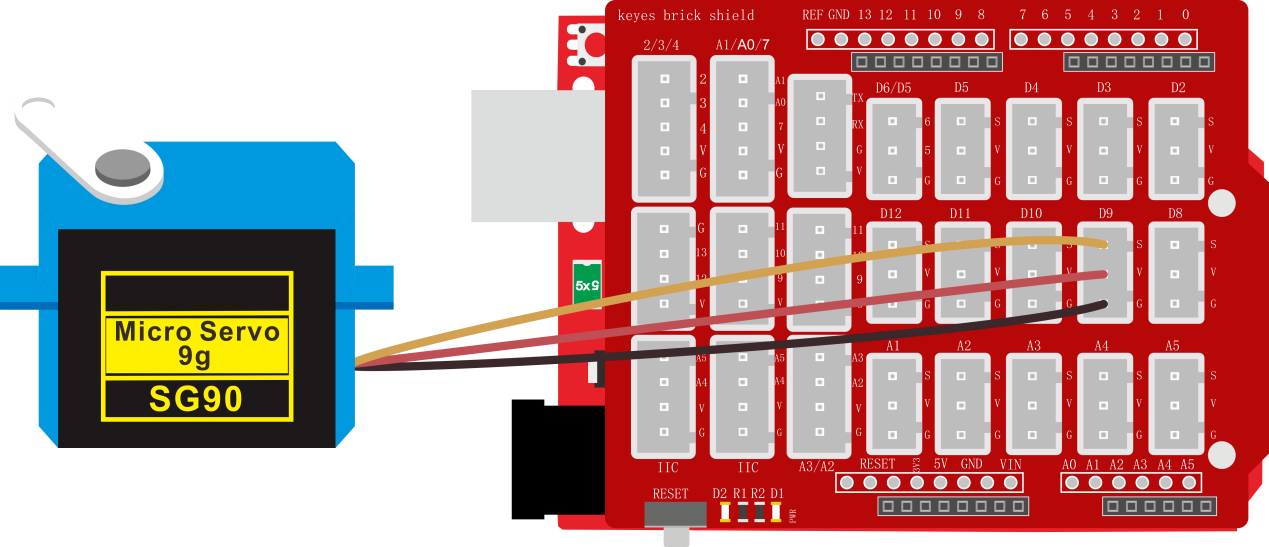
3.接线图#
4测试代码#
代码1:
代码2:
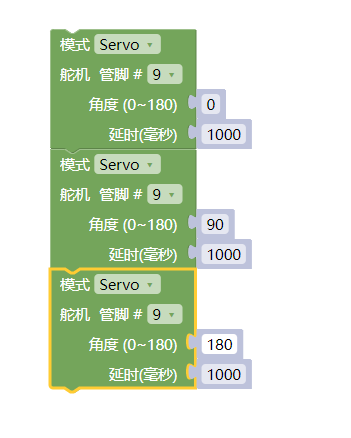
5.代码1说明#
在
 找到
找到 ,
,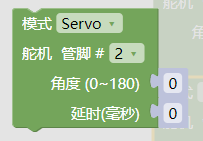 并设置管脚为9。
并设置管脚为9。 为舵机转动的角度位置,也就是说,输入0~180的数字,舵机就转动到对应角度的位置。
为舵机转动的角度位置,也就是说,输入0~180的数字,舵机就转动到对应角度的位置。
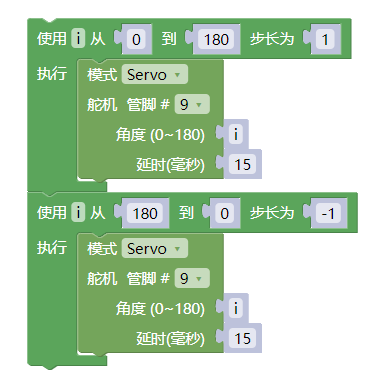
6.代码2说明#
先找到
并设置管脚9;在
 找的
找的 ,范围设置为0~180,步长为1,因为我们想让舵机一度一度的转动:
,范围设置为0~180,步长为1,因为我们想让舵机一度一度的转动: ,加个延时15ms,不让它转动得太快。
,加个延时15ms,不让它转动得太快。 ,然后又从180度转回0度。
,然后又从180度转回0度。
7.测试结果#
实验1 结果:上传测试代码成功,利用USB线上电后,舵机由0度,90度,180度三个角度来回转动。
实验2 结果:上传测试代码成功,利用USB线上电后,舵机由0~180度来回转动,并且每次转动一度。