项目十四 蓝牙遥控智能车#
项目介绍:
前面课程中,我们利用红外控制智能车运动,在这课程中我们可以做一个蓝牙控制智能车。既然是控制智能车,那就有一个控制端和被控制端。课程中我们把手机当做控制端(主机),蓝牙模块(从机)连接的智能车当做被控制端。使用时,我们需要在手机上安装一个APP,然后连接蓝牙模块,然后我们利用蓝牙APP上各个按钮,控制智能车实现各种运动状态。
蓝牙遥控智能车具体逻辑如下表格:
经过前面 第7课 蓝牙遥控的原理及应用 的学习和了解,经过测试,我们得出了手机APP上各个按钮对应的控制字符,如下图:
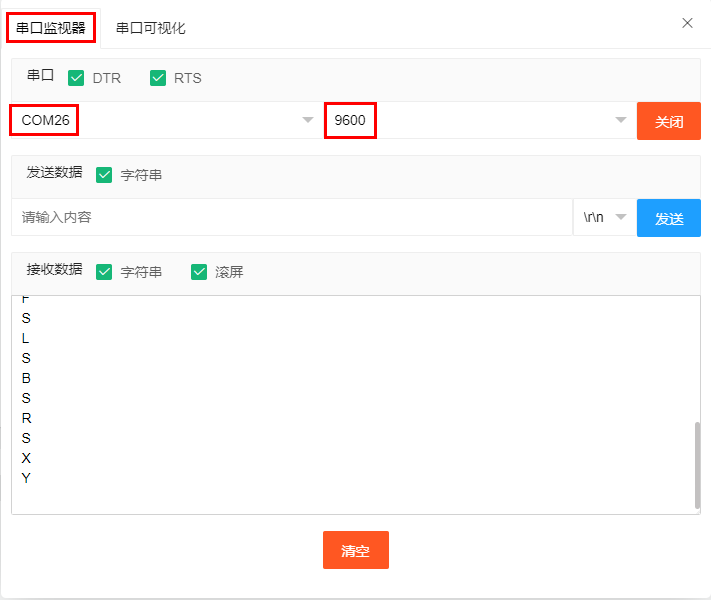
以下是APP上各个按钮对应的控制字符和对应的功能,这里我们整理了一个表格如下:
按钮: |
功能:配对连接HM-10蓝牙模块 |
|
|---|---|---|
按钮: |
功能:进入蓝牙控制界面 |
|
按钮: |
功能:断开蓝牙连接 |
|
按钮: |
控制字符:按下:F;松开:S |
功能:按下,小车前进;松开就停止 |
按钮: |
控制字符:按下:B;松开:S |
功能:按下,小车后退;松开就停止 |
按钮: |
控制字符:按下:L;松开:S |
功能:按下,小车左旋转;松开就停止 |
按钮: |
控制字符:按下:R;松开:S |
功能:按下,小车右旋转;松开就停止 |
按钮: |
控制字符: 点击发送:S |
功能:小车停止,停止所有功能 |
按钮: |
控制字符: |
功能:点击一下开启手机方向感应控制,再点击一下退出方向感应控制 |
按钮: |
控制字符: 点击发送:U |
功能:开启避障功能,点击 |
按钮: |
控制字符: 点击发送:X |
功能:开启寻光功能,点击 |
按钮: |
控制字符: 点击发送:Y |
功能:开启超声波跟随功能,点击 |












接线图:
⚠️特别注意:坦克智能车已经组装好了,这里不需要把传感器模块和其他的都拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
蓝牙+电机
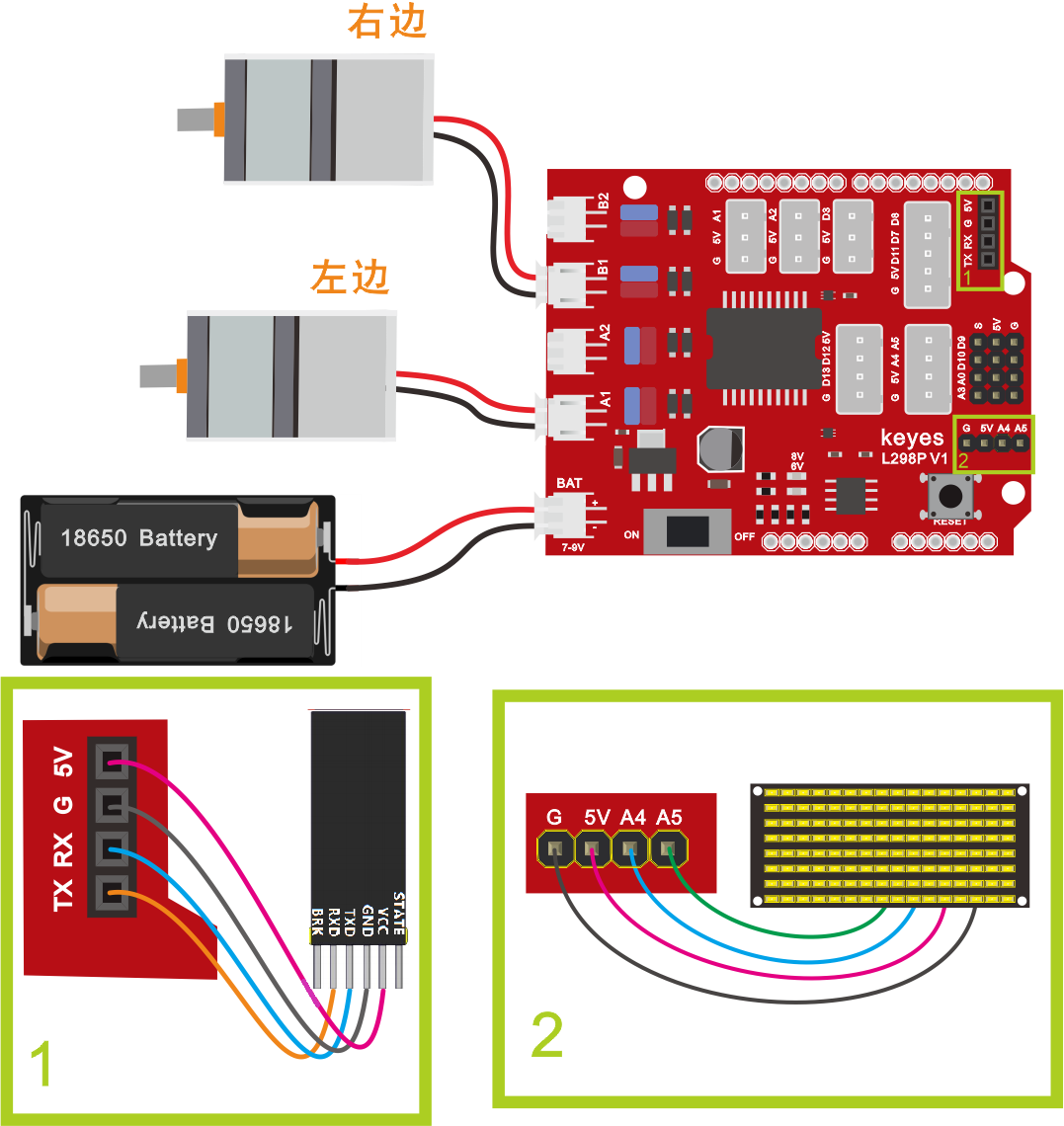
接线注意:蓝牙模块的RXD、TXD、GND、VCC分别对应的接到电机驱动扩展板上的TX、RX、-(GND)、+(VCC),而蓝牙模块的STATE和BRK两引脚不需要接,电源接到BAT接口。
左、右两电机分别对应的连接到电机驱动扩展板上的接口A和接口B;蓝牙模块的RXD、TXD、GND、VCC分别对应的接到电机驱动扩展板上的TX、RX、-(GND)、+(VCC),而蓝牙模块的STATE和BRK两引脚不需要接,电源接到BAT接口。
测试代码:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
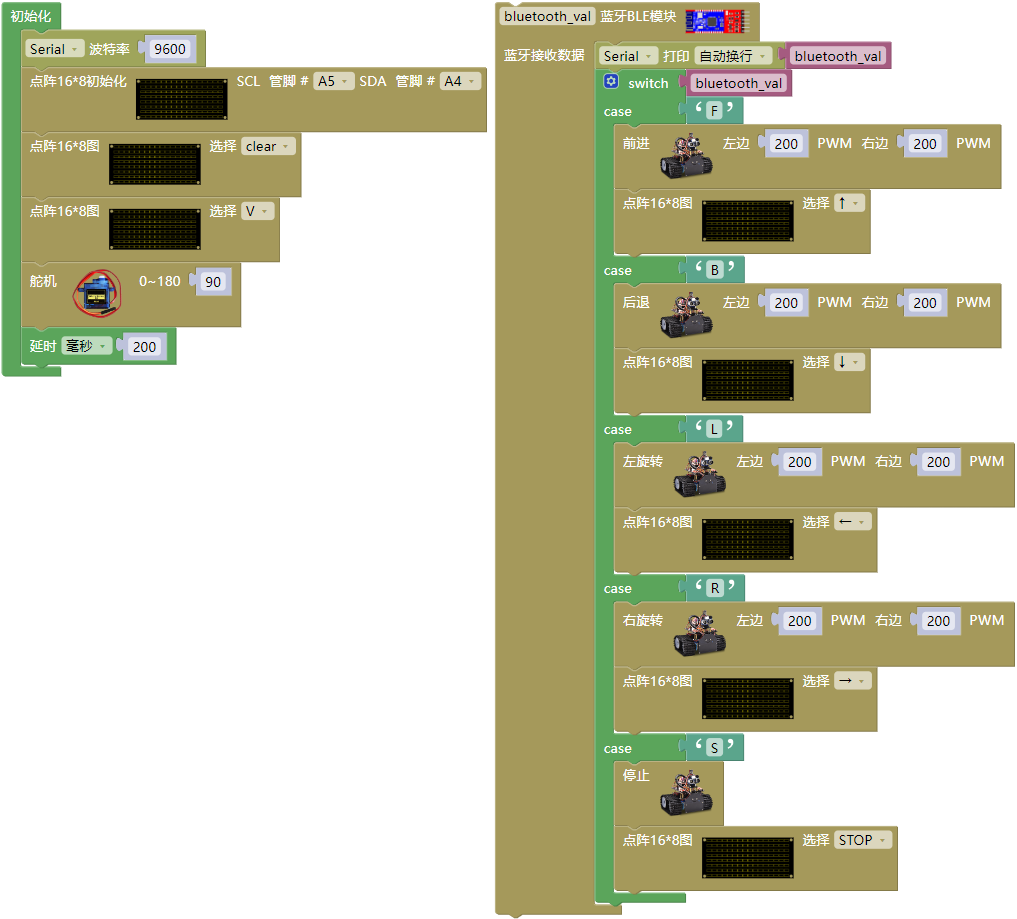
好了,按住蓝牙APP的前进、后退、左转、右转、停止的按钮控制桌面迷你蓝牙智能车分别前进、后退、左转、右转、停止的程序代码全编写完了。上传程序,看看效果。
测试结果:
将驱动扩展板堆叠在UNO PLUS板上,上传好代码,按照接线图接线,将拨码开关拨至ON端后,插上蓝牙模块,连接好蓝牙,手机APP连接蓝牙成功后,我们就能用手机APP控制智能车运动并在LED灯板上显示对应的图案了。
按下 按钮,小车前进;按下
按钮,小车前进;按下 按钮,小车后退;按下
按钮,小车后退;按下 按钮,小车左旋转;按下
按钮,小车左旋转;按下 按钮,小车右旋转;点击
按钮,小车右旋转;点击 按钮,小车停止;点击一下
按钮,小车停止;点击一下 按,开启手机重力感应控制,拿起手机从不同的方向移动手机,智能车会自动的移动,再点击一下按钮,退出重力感应控制。
按,开启手机重力感应控制,拿起手机从不同的方向移动手机,智能车会自动的移动,再点击一下按钮,退出重力感应控制。