项目一 LED灯闪烁#
项目介绍:

前面我们安装了keyes PLUS开发板的驱动。接下来的项目我们就要由简单到复杂,一步一步探索Arduino的世界了。首先我们要来完成经典的“Arduino点亮LED”,也就是Blink项目。Blink对于学习Arduino的爱好者而言,是最基础的项目是新手必须经历的一个练习。
LED,发光二极管的简称。由含镓(Ga)、砷(As)、磷(P)、氮(N)等的化合物制成。当电子与空穴复合时能辐射出可见光,因而可以用来制成发光二极管。在电路及仪器中作为指示灯,或者组成文字或数字显示。
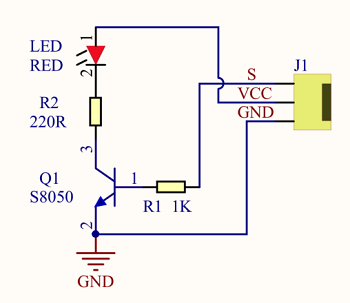
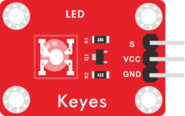
为了实验的方便,我们将LED发光二极管做成了一个模块,在第一个项目中,我们用一个最基本的测试代码来控制LED,亮一秒钟,灭一秒钟,来实现闪烁的效果。你可以改变代码中LED灯亮灭的时间,实现不同的闪烁效果。LED模块信号端S为高电平时LED亮起,S为低电平时LED熄灭。
LED模块参数:
控制接口: 数字口
工作电压: DC 3.3-5V
排针间距: 2.54mm
LED显示颜色:红色
项目组件:
UNO R3 开发板*1 |
L298P 电机驱动扩展板 V1*1 |
LED白发红模块*1 |
|---|---|---|
|
|
|
USB线*1 |
3Pin 双母头杜邦线*1 |
18650双节电池盒 (18650电池*2(电池自配))*1 |
|
|
|




接线图:
⚠️特别注意:坦克智能车已经组装好了,这里不需要把传感器模块和其他的都拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码。但是,LED灯是需要另外连接上去的!
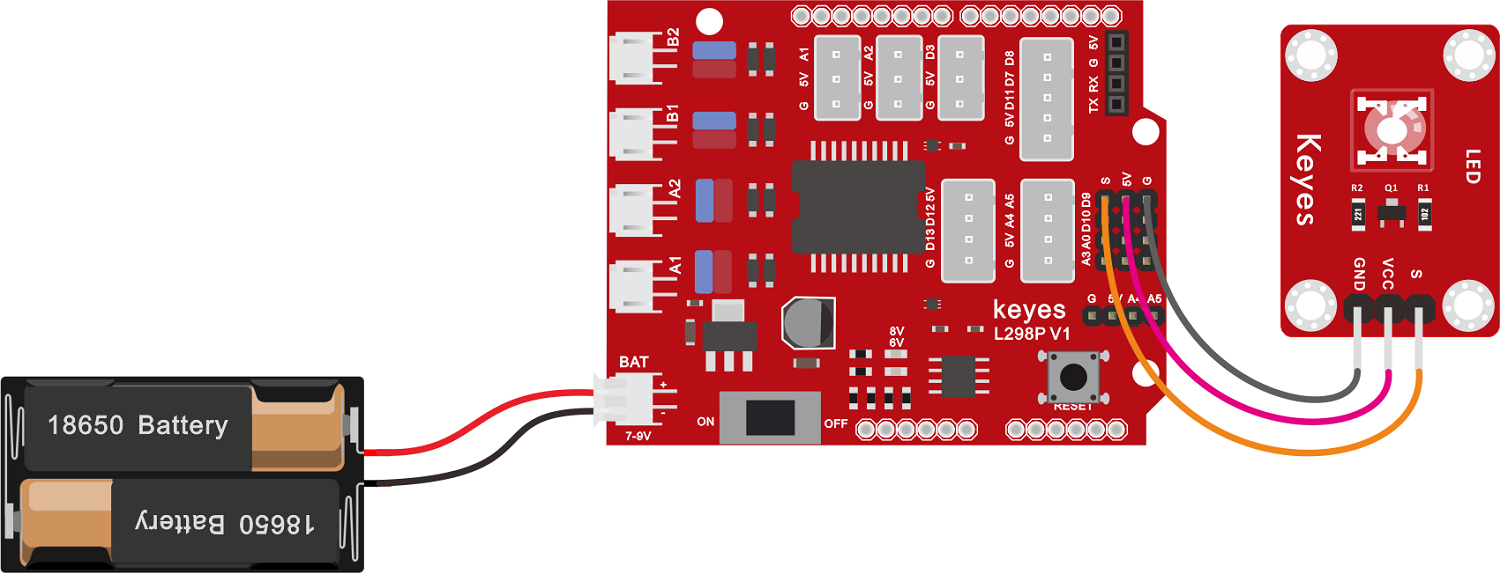
由上图我们可以看到,扩展板是堆叠在开发板上的,LED模块的-接到了扩展板的G,LED模块的+接到了扩展板的5V,LED模块的S已经接到了扩展板上的D9接口,接好线之后我们开始编写代码:
项目代码:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
/*
迷你履带坦克机器人
课程 1.1
LED闪烁
http://www.keyes-robot.com
*/
void setup()
{
pinMode(9, OUTPUT);// 初始化数字口9为输出模式
}
void loop() // 无限循环
{
digitalWrite(9, HIGH); // 设置数字口输出高电平,打开LED
delay(1000); // 等待1秒
digitalWrite(9, LOW); // 设置数字口输出低电平,关闭LED
delay(1000); // 等待1秒
}
项目结果:
点击上传程序,你应该看到D9脚接着的LED打开和关闭,而且间隔的时间是一秒钟。
代码说明:
pinMode(9,OUTPUT) -在使用Arduino的引脚之前,你需要告诉开发板它是INPUT还是OUTPUT。我们使用一个内置的“函数”pinMode()来做到这一点。
digitalWrite(9,HIGH) -当使用引脚作为OUTPUT时,可以将其命令为HIGH(输出5伏)或LOW(输出0伏)。
项目拓展:
前面我们控制了LED模块亮1秒钟,灭一秒钟,现在我们来拓展一下思路,通过改变delay的时间来改变LED 灯闪烁的频率。
代码如下:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
/*
迷你履带坦克机器人
课程 1.2
LED闪烁
http://www.keyes-robot.com
*/
void setup()
{
pinMode(9, OUTPUT);// 初始化数字口9为输出模式
}
void loop() // 无限循环
{
digitalWrite(9, HIGH); // 设置数字口输出高电平,打开LED
delay(100); // 等待0.1秒
digitalWrite(9, LOW); // 设置数字口输出低电平,关闭LED
delay(100); // 等待0.1秒
}
怎么样是不是很好理解,就是通过改变delay这个代码的时间,来改变LED亮和灭的频率,不多说,我们上传代码。看看这个LED灯闪烁的频率是不是比之前快了?