项目九 LED表情灯板#
项目介绍:
如果在我们的机器人上加一块表情面板,这将是多么好玩的一件事情,keyes的8x16点阵就可以满足你的要求。你可以自己创建面部表情,动画,图案或者是其他有趣的显示。8x16LED灯板自带128个LED。微处理器(arduino)的数据通过两线总线接口与AiP1640通讯,从而控制模块上128个LED的亮灭,从而让模块上点阵显示你需要的图案。为方便接线,我们还配送一根HX-2.54 4Pin接线。
规格参数

工作电压: DC 3.3-5V
功率损耗:400mW
震荡频率:450KHz
驱动电流:200mA
工作温度:-40~80℃
项目组件:
UNO PLUS 开发板*1 |
L298P 电机驱动扩展板 V1*1 |
8x16 LED灯板*1 |
|---|---|---|
|
|
|
USB线*1 |
18650双节电池盒 (18650电池2 (电池自配)) 1 |
4P 转杜邦线母单*1 |
|
|
|

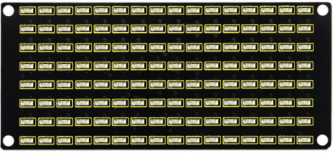


*816点阵模块详细介绍:**
8*16点阵的电路图:
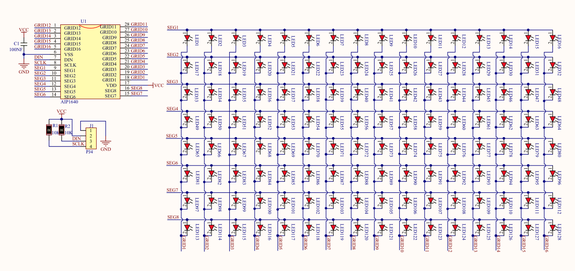
控制8*16点阵的原理:
是怎么控制8x16点阵的每个led灯的呢?要知道一个字节有8位,每一位是0或1,0时关闭led,1时打开led灯,那么一个字节就可以控制点阵一列的led灯开关了,自然16个字节就可以控制16列led灯,即控制了8*16点阵。
接口说明及通讯协议:
微处理器(arduino)的数据通过两线总线接口与AiP1640通讯。
通讯协议图如下(SCLK)就是SCL,(DIN)就是SDA :
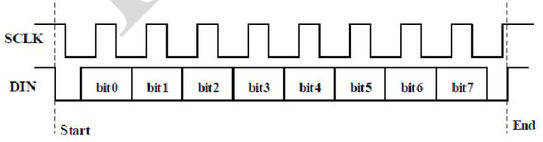
① 数据输入的开始条件是,SCL为高电平,SDA由高变低。
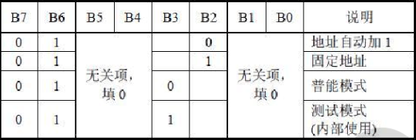
② 数据命令设置,有下图所示方法可选
我们的示例程序中选择 地址自动加1的方式,其二进制是0100 0000对应的十六进制为0x40
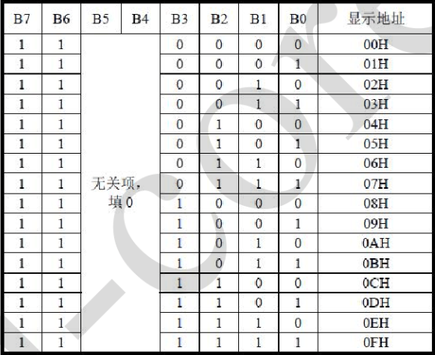
③ 地址命令设置,有如下图地址可以选
我们示例程序中选了第一个00H,其二进制1100 0000对应的十六进制是0xc0
④ 数据输入的要求是,在输入数据时当SCL是高电平时,SDA上的信号必须保持不变,只有SCL上的时钟信号为低电平时,SDA上的信号才可以改变。数据的输入是 低位在前,高位在后 传输。
⑤ 数据传输结束的条件是,SCL为低时,SDA为低,SCL为高时,SDA电平也变为高电平。
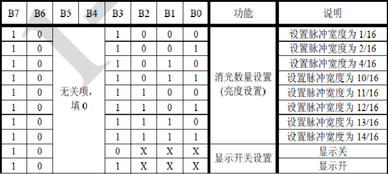
⑥ 显示控制,设置不同脉宽,脉宽有如下图可选
我们示例中选了脉宽为4/16,1000 1010对应的十六进制是0x8A
对应我们的示例程序来学习会理解的更好。
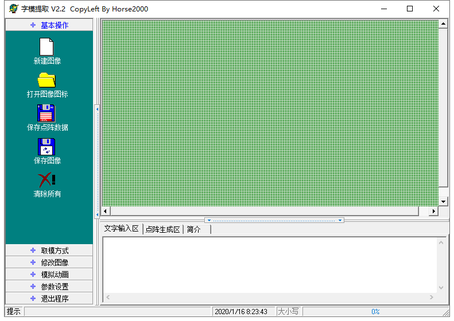
取模工具的使用说明
设置时,我们需要把一个图案转换成1组16个的16位数据,这里就需要用到一个取模软件,这个软件已放入资料文件夹中。使用时打开 图标,显示如下图。
图标,显示如下图。
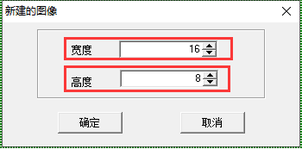
点击 这个图标新建图案,根据显示屏规格,设置宽度为16,高度为8,如下图。
这个图标新建图案,根据显示屏规格,设置宽度为16,高度为8,如下图。
初始时发现格点不大,不方便设置,我们可以通过设置模拟动画,设置格点大小,点击如下图。
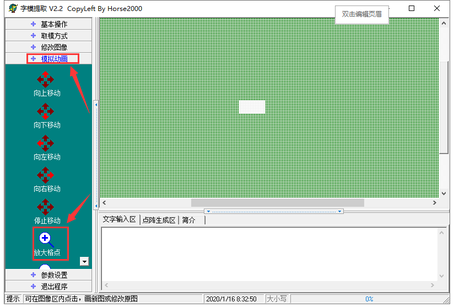
一直鼠标左键点击 ,就可以一直放大格点了。
,就可以一直放大格点了。
放大后,我们就可以通过用鼠标点击白色区域,设置显示图案了。
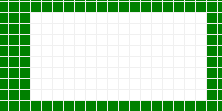
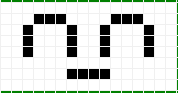
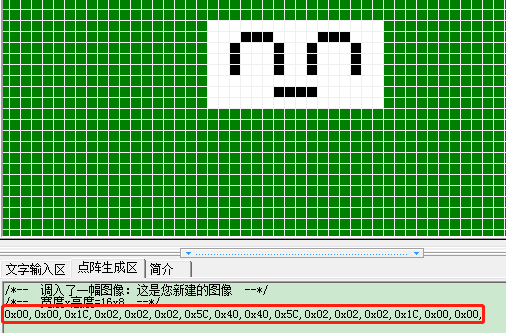
设置时,鼠标点击(左右键都可以)白色格点,变为黑色;再点击黑色格点,变为白色。黑色代表该格点显示亮起,白色代表格点不显示。显示屏最多能设置16*8个点显示。设置笑脸显示如下图。
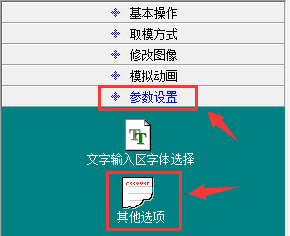
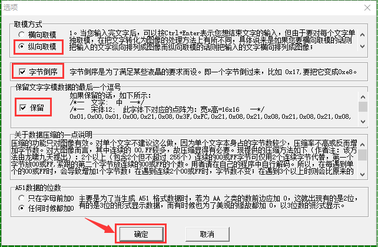
设置参数设置,选择其他选项,设置如下图。设置完成点击 。
。
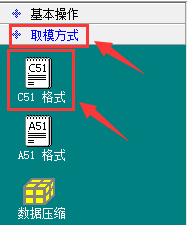
设置取模方式,选择C51格式选择如下图。
设置成功后,在以下区域就可以看到对应的16个数据了,只需要将数据复制粘贴在数组中,就可以用直接调用了。(0x00,0x00,0x1C,0x02,0x02,0x02,0x5C,0x40,0x40,0x5C,0x02,0x02,0x02,0x1C,0x00,0x00)
接线图:
⚠️特别注意:坦克智能车已经组装好了,这里不需要把传感器模块和其他的都拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
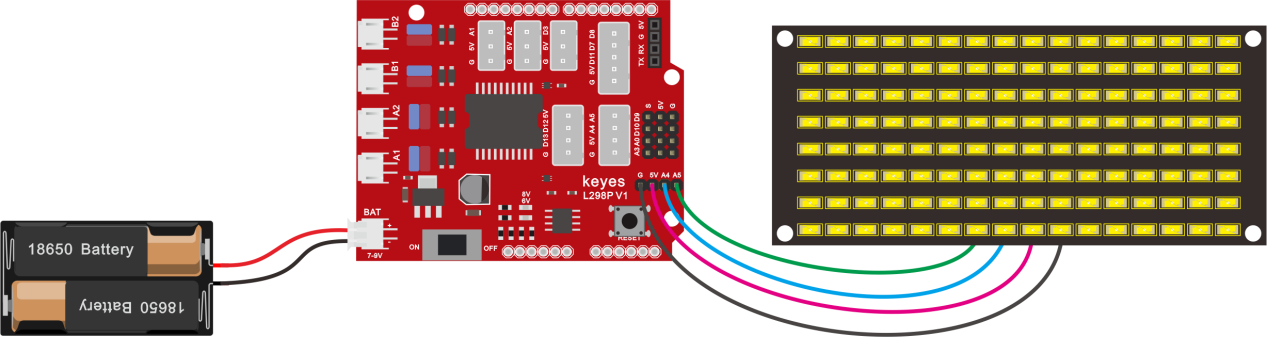
接线注意: 8x16 LED灯板的GND、VCC、SDA、SCL分别对应的接到keyes传感器扩展板-(GND)、+(VCC)、A4、A5进行两线串行通信。(注意:这里是接了arduino IIC的引脚,但是这个模块并不是IIC通讯的,是可以接任意两个引脚的。)
项目代码
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
点阵显示上面画的微笑表情的代码
/*
迷你履带坦克机器人
课程 9.1
8*16点阵
http://www.keyes-robot.com
*/
unsigned char smile[] = {0x00, 0x00, 0x1c, 0x02, 0x02, 0x02, 0x5c, 0x40, 0x40, 0x5c, 0x02, 0x02, 0x02, 0x1c, 0x00, 0x00};
#define SCL_Pin A5 //设置时钟引脚为 A5
#define SDA_Pin A4 //设置数据引脚为 A4
void setup()
{
//设置引脚为输出
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
//清屏
//matrix_display(clear);
}
void loop()
{
matrix_display(smile); //显示微笑表情图案
}
//这个函数用于点阵屏显示
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //调用数据传输开始条件的函数
IIC_send(0xc0); //选择地址
for (int i = 0; i < 16; i++) //图案数据有16个字节
{
IIC_send(matrix_value[i]); //传输图案的数据
}
IIC_end(); //结束图案数据传输
IIC_start();
IIC_send(0x8A); //显示控制,选择脉宽为4/16
IIC_end();
}
//传输数据开始的条件
void IIC_start()
{
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
}
//传输数据
void IIC_send(unsigned char send_data)
{
for (char i = 0; i < 8; i++) //每个字节有8位
{
digitalWrite(SCL_Pin, LOW); //将时钟引脚SCL_Pin拉低,才可以改变SDA的信号
delayMicroseconds(3);
if (send_data & 0x01) //根据字节的每一位是1还是0来设置SDA_Pin的高低电平
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //将时钟引脚SCL_Pin拉高,停止数据的传输
delayMicroseconds(3);
send_data = send_data >> 1; //一位一位的检测,所以将数据右移一位
}
}
//数据传输结束的标志
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
项目结果:
在 UNO PLUS 开发板上传代码成功,按照接线图接线,拨码开关拨打到右端上电后,看一下,我们的显示屏上是不是显示了一个笑脸。

项目拓展:
我们利用刚刚学到的取模工具,让点阵循环显示开始图案,前进图案,停止图案,然后清除图案,时间间隔为2000毫秒。



利用取模工具得到的我们要显示的图形代码
开始的代码:
0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01
前进的代码:
0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00
后退的代码:
0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00
左转的代码:
0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00
右转的代码:
0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00
停止的代码:
0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00
清屏的代码:
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00
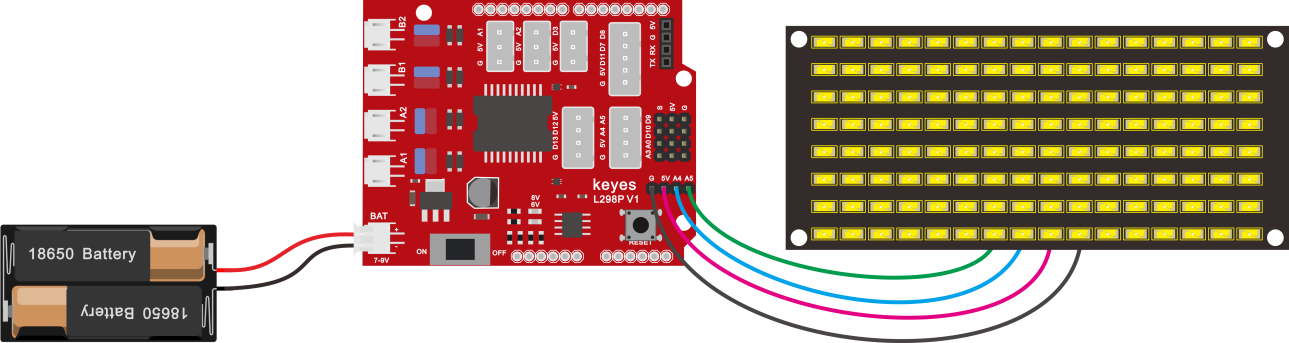
接线图不变:
下面就是多个图案切换显示的代码:
(特别提醒:在上传程序代码前,需要把蓝牙模块取下,否则代码会上传失败。需要上传代码成功后,再连接蓝牙模块。)
/*
迷你履带坦克机器人
课程 9.2
8*16点阵
http://www.keyes-robot.com
*/
//数组,用于储存图案的数据,可以自己算也可以从取摸工具中得到
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_Pin A5 //设置时钟引脚为 A5
#define SDA_Pin A4 //设置数据引脚为 A4
void setup()
{
//设置引脚为输出
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
//清屏
matrix_display(clear);
}
void loop()
{
matrix_display(start01); //显示开始图案
delay(2000);
matrix_display(front); //前进图案
delay(2000);
matrix_display(STOP01); //停止图案
delay(2000);
matrix_display(clear); //清屏
delay(2000);
}
//这个函数用于点阵屏显示
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //调用数据传输开始条件的函数
IIC_send(0xc0); //选择地址
for (int i = 0; i < 16; i++) //图案数据有16个字节
{
IIC_send(matrix_value[i]); //传输图案的数据
}
IIC_end(); //结束图案数据传输
IIC_start();
IIC_send(0x8A); //显示控制,选择脉宽为4/16
IIC_end();
}
//传输数据开始的条件
void IIC_start()
{
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
}
//传输数据
void IIC_send(unsigned char send_data)
{
for (char i = 0; i < 8; i++) //每个字节有8位
{
digitalWrite(SCL_Pin, LOW); //将时钟引脚SCL_Pin拉低,才可以改变SDA的信号
delayMicroseconds(3);
if (send_data & 0x01) //根据字节的每一位是1还是0来设置SDA_Pin的高低电平
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //将时钟引脚SCL_Pin拉高,停止数据的传输
delayMicroseconds(3);
send_data = send_data >> 1; //一位一位的检测,所以将数据右移一位
}
}
//数据传输结束的标志
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
上传代码到开发板,我们看到表情面板(8*16点阵显示开始前进停止然后清屏的图案,循环反复)。