第8课 风扇#
8.1 项目介绍#
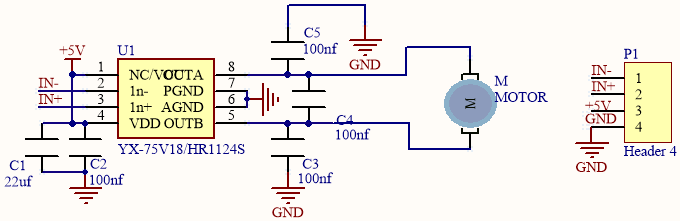
130电机控制模块采用HR1124S电机控制芯片。HR1124S是应用于直流电机方案的单通道H桥驱动器芯片。HR1124S的H桥驱动部分采用低导通电阻的PMOS和NMOS功率管。低导通电阻保证芯片低的功率损耗,使得芯片安全工作更长时间。此外HR1124S拥有低待机电流,低静态工作电流,这些性能使HR1124S易用于玩具方案。
该模块兼容各种单片机控制板,如arduino系列单片机。模块上自带的防反插红色端子间距为2.54mm,实验中,我们可通过输出到两个信号端IN+和IN-的电压方向来控制电机的转动方向,使用PWM输出控制风扇的转速,让电机转动起来。
8.2. 模块相关资料#
(1)元件知识:
130电机控制模块采用HR1124S电机控制芯片。HR1124S是应用于直流电机方案的单通道H桥驱动器芯片。HR1124S的H桥驱动部分采用低导通电阻的PMOS和NMOS功率管。低导通电阻保证芯片低的功率损耗,使得芯片安全工作更长时间。此外HR1124S拥有低待机电流,低静态工作电流,这些性能使HR1124S易用于玩具方案。
该模块兼容各种单片机控制板,如arduino系列单片机。模块上自带的防反插红色端子间距为2.54mm,实验中,我们可通过输出到两个信号端IN+和IN-的电压方向来控制电机的转动方向,使用PWM输出控制风扇的转速,让电机转动起来。
工作电压: |
3.3-5V(DC) |
最大电流: |
200mA (DC5V) |
|---|---|---|---|
最大功率: |
1W |
控制接口: |
双数字口(数字输入) |
工作温度: |
-10°C ~+50°C |
环保属性: |
ROHS |
(2)控制方法
需要两个引脚控制风扇的电机,一引脚为IN+,二引脚为IN-。PWM值范围是0~255,当两个引脚的PWM输出一定差值时,风扇就能转动。
IN+ - INB- = -45 |
顺时针转动 |
|---|---|
IN± IN- ;= 45 |
逆时针转动 |
IN+ == 0 , IN- == 0 |
停止 |
8.3 实验组件#
|
|
|
|
|---|---|---|---|
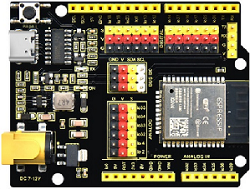
ESP32 Plus主板 *1 |
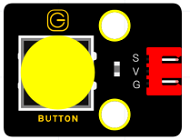
按键 *2 |
130电机模块 *1 |
风扇叶 *1 |
|
|
|
|
4p线 *1 |
3P线 *2 |
USB线 *1 |





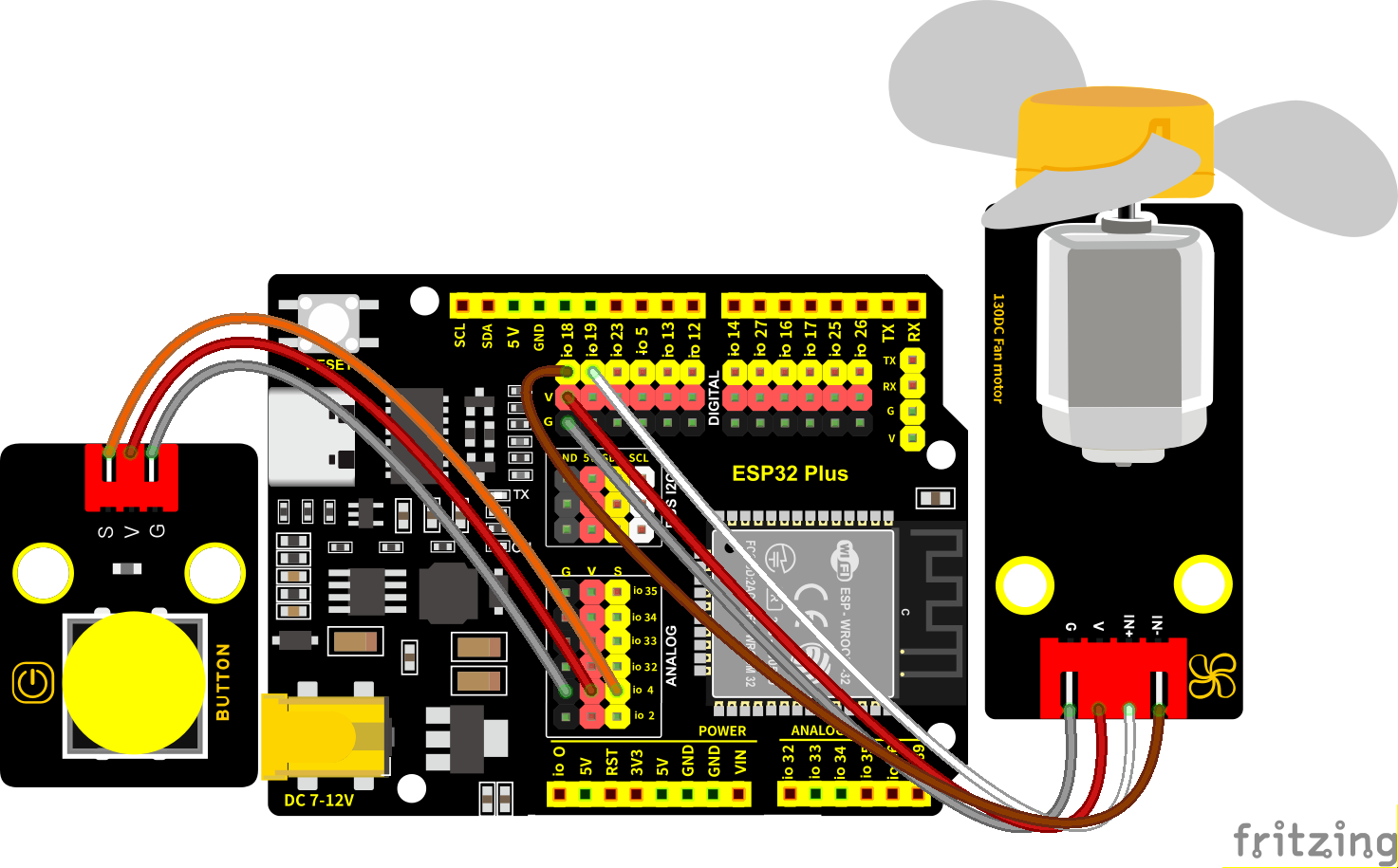
8.4 模块接线图#
木板房子⑦处(左侧)按键1和130电机模块的控制引脚:
木板房子⑦处(左侧)按键1(S引脚) |
io4 |
|---|---|
电机模块的IN+引脚 |
io19 |
电机模块的IN-引脚 |
io18 |
⚠️ 特别注意:智能家居已经组装好了,这里不需要把按键模块和130电机模块拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
8.5 控制风扇转动的实验代码1#
打开“Thonny”软件,点击“此电脑” → “D:” → “MicroPython资料” → “MicroPython_代码”。并鼠标左键双击“Project_08.1_fan.py”。
# 作者 : www.keyes-robot.com
from machine import Pin,PWM
import time
#电机的两个引脚
INA =PWM(Pin(19,Pin.OUT),10000,0)#INA对应于IN+
INB =PWM(Pin(18,Pin.OUT),10000,2)#INB对应于IN-
try:
while True:
#逆时针方向2秒
INA.duty(0) #占空比范围为0-1023
INB.duty(700)
time.sleep(2)
#停止1秒
INA.duty(0)
INB.duty(0)
time.sleep(1)
#顺时针旋转2秒
INA.duty(700)
INB.duty(0)
time.sleep(2)
#停止1秒
INA.duty(0)
INB.duty(0)
time.sleep(1)
except:
INA.duty(0)
INB.duty(0)
INA.deinit()
INB.deinit()
8.6 实验结果1#
按照接线图接好线,将 ESP32 主控板通过Micro USB数据线与计算机相连供电,外接电源供电,然后单击按钮 ,示例代码开始执行。
,示例代码开始执行。

示例代码开始执行之后,你会看到的现象是:电机模块上的风扇顺时针和逆时针的转动。
单击 “停止/启动后端进程”退出程序。
“停止/启动后端进程”退出程序。
8.7 代码流程图#
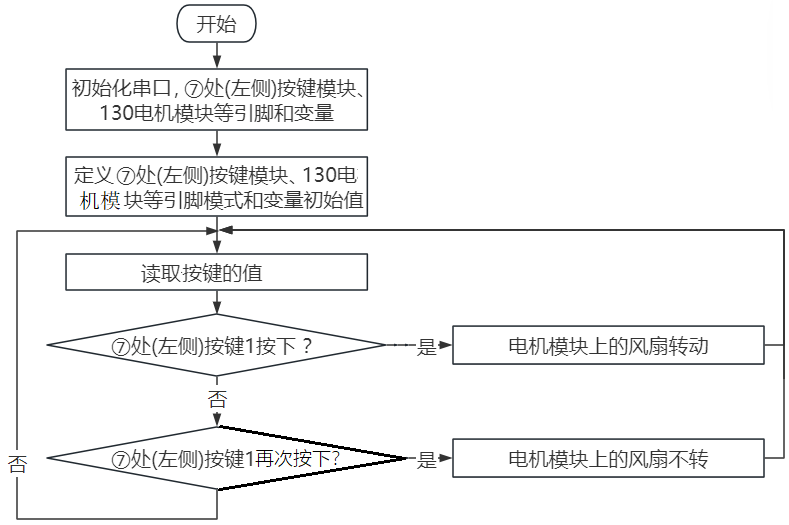
8.8 按钮开关风扇的实验代码2#
一台简易的风扇,通过按键1开关风扇。
打开“Thonny”软件,点击“此电脑” → “D:” → “MicroPython资料” → “MicroPython_代码”。并鼠标左键双击“Project_08.2_button_fan.py”。
# 作者 : www.keyes-robot.com
from machine import Pin,PWM
import time
#电机的两个引脚
INA =PWM(Pin(19,Pin.OUT),10000,0)##INA对应于IN+
INB =PWM(Pin(18,Pin.OUT),10000,2)#INB对应于IN-
button1 = Pin(4, Pin.IN, Pin.PULL_UP)
count = 0
try:
while True:
btnVal1 = button1.value() # 读取按钮1的值
if(btnVal1 == 0):
time.sleep(0.01)
while(btnVal1 == 0):
btnVal1 = button1.value()
if(btnVal1 == 1):
count = count + 1
print(count)
val = count % 2
if(val == 1):
INA.duty(0) #占空比范围为0-1023
INB.duty(700)
else:
INA.duty(0)
INB.duty(0)
except:
INA.duty(0)
INB.duty(0)
INA.deinit()
INB.deinit()
8.9 实验结果2#
按照接线图接好线,将 ESP32 主控板通过Micro USB数据线与计算机相连供电,外接电源供电,然后单击按钮,示例代码开始执行。
示例代码开始执行之后,你会看到的现象是:先点击一下木板房子⑦处(左侧)按键1,风扇开始转动,再按一下木板房子⑦处(左侧)按键1,风扇停止。
单击“停止/启动后端进程”退出程序。