6. ESP32智能家居组装步骤#
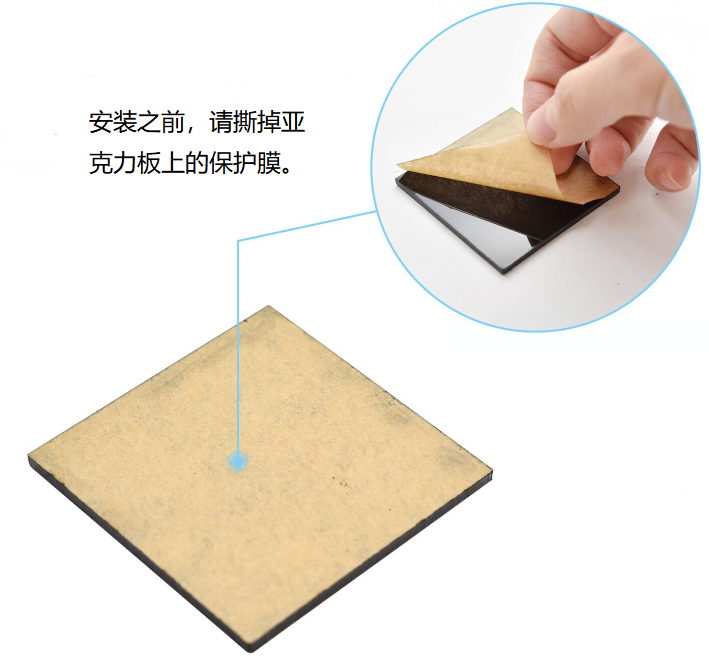
注意:这个套件的亚克力板使用时需要先撕去上面的保护膜。
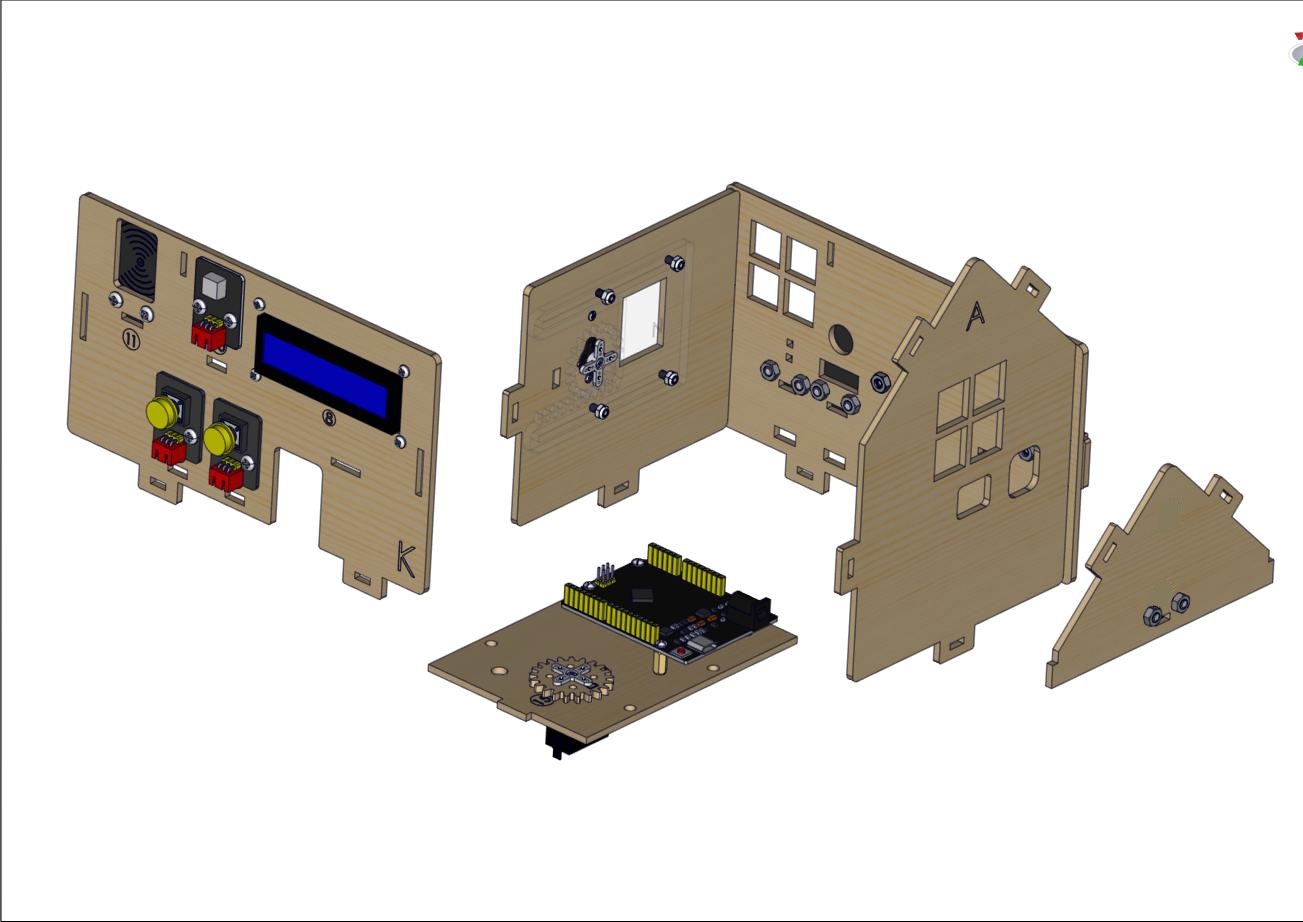
安装1
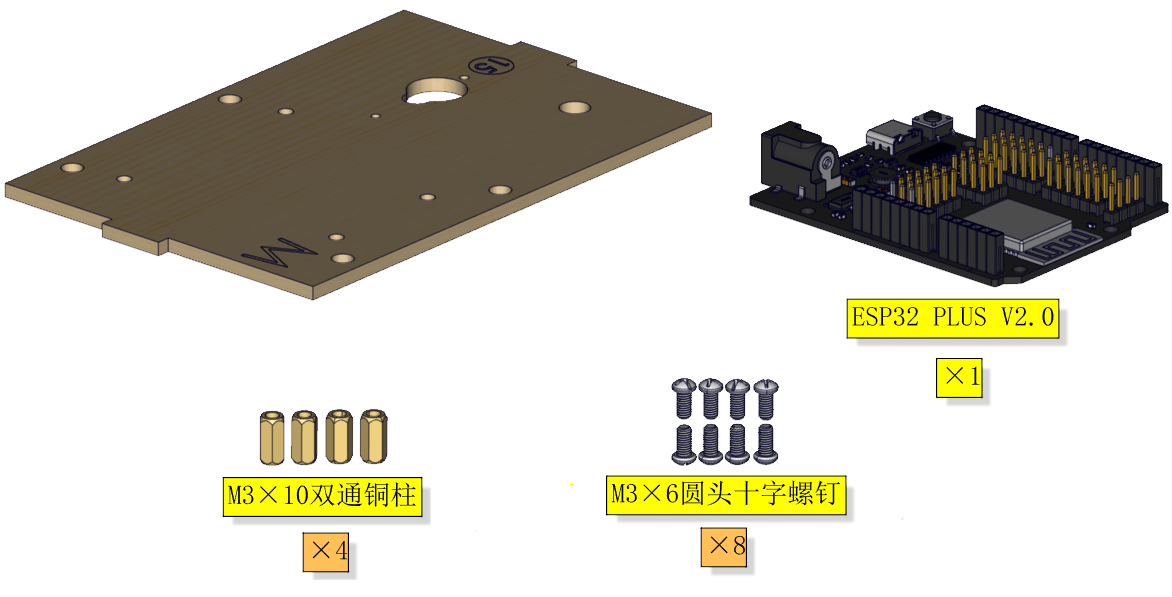
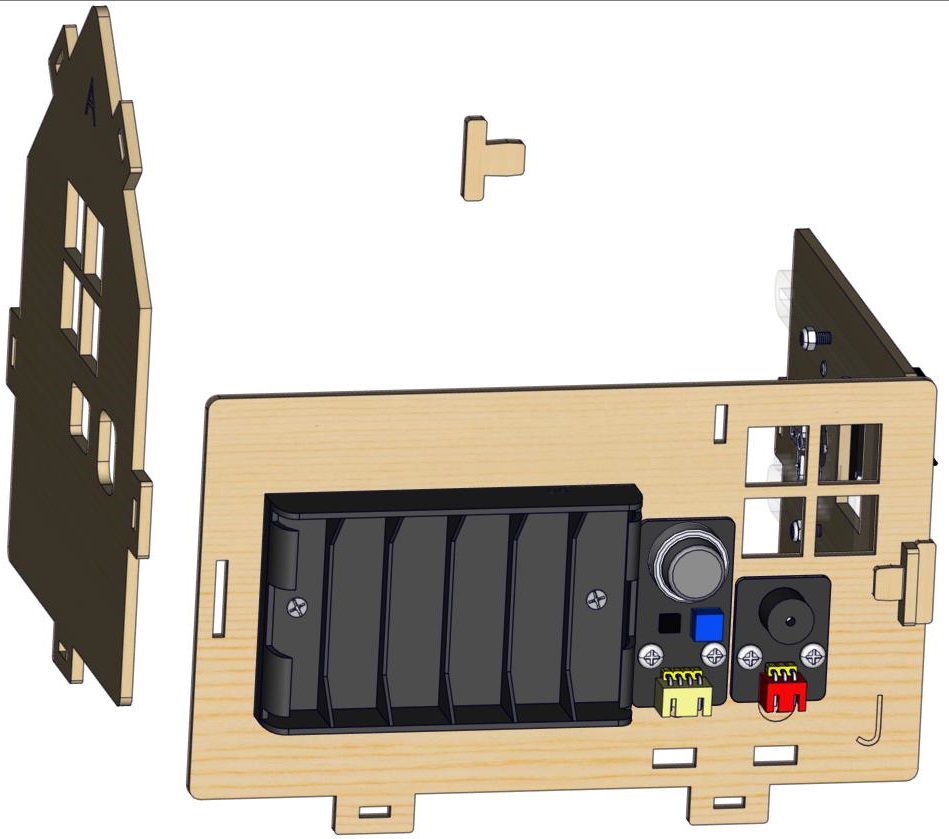
安装所需零件
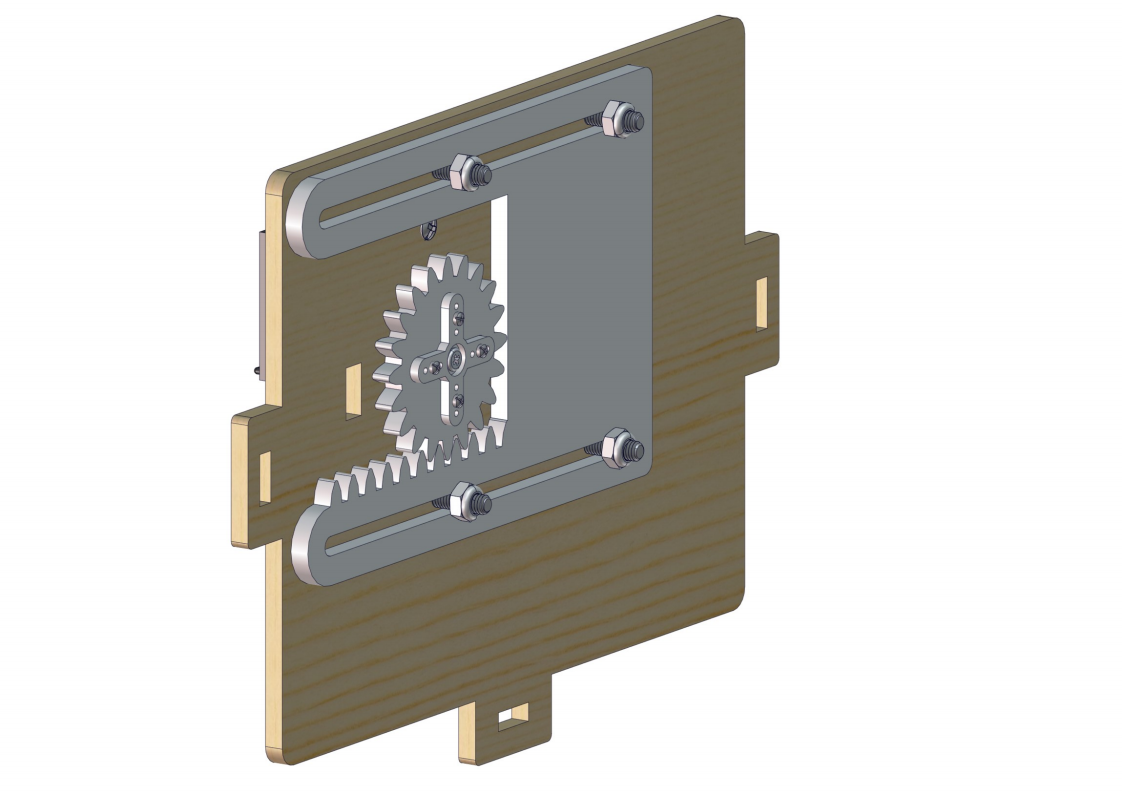
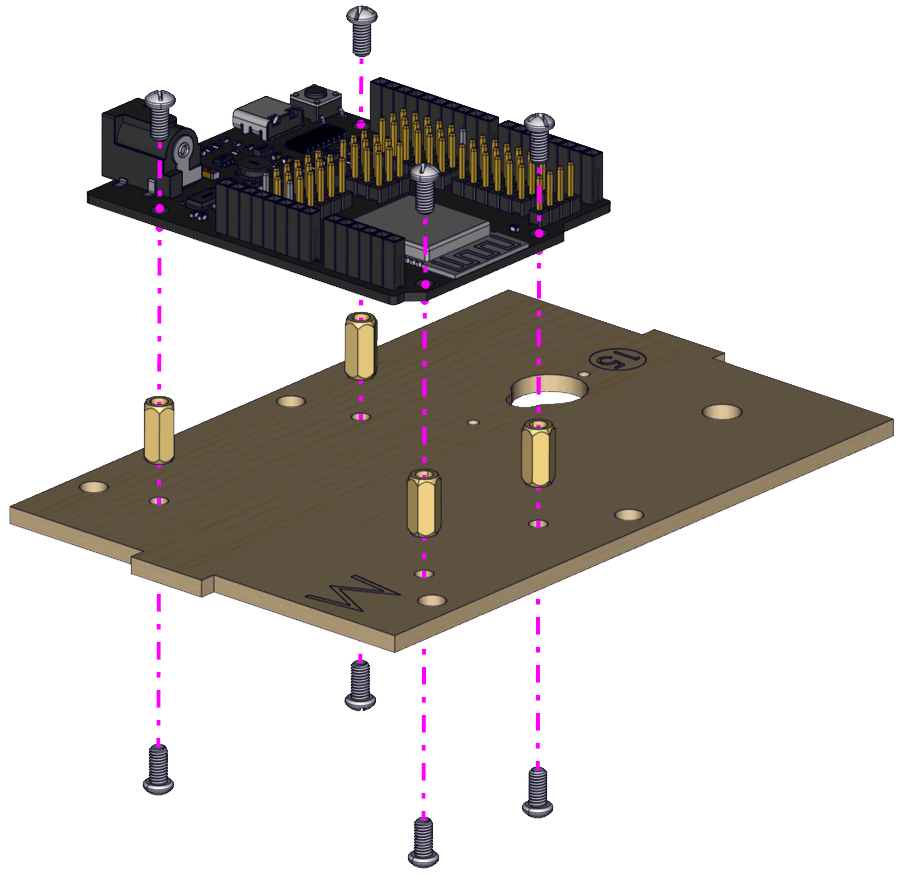
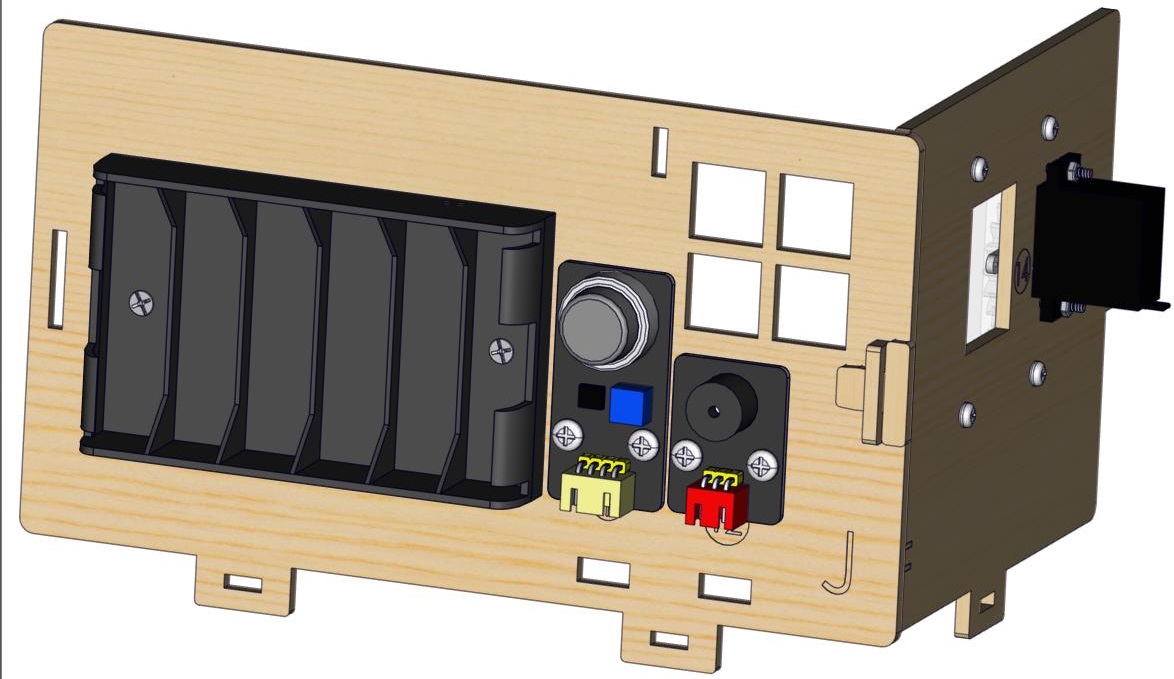
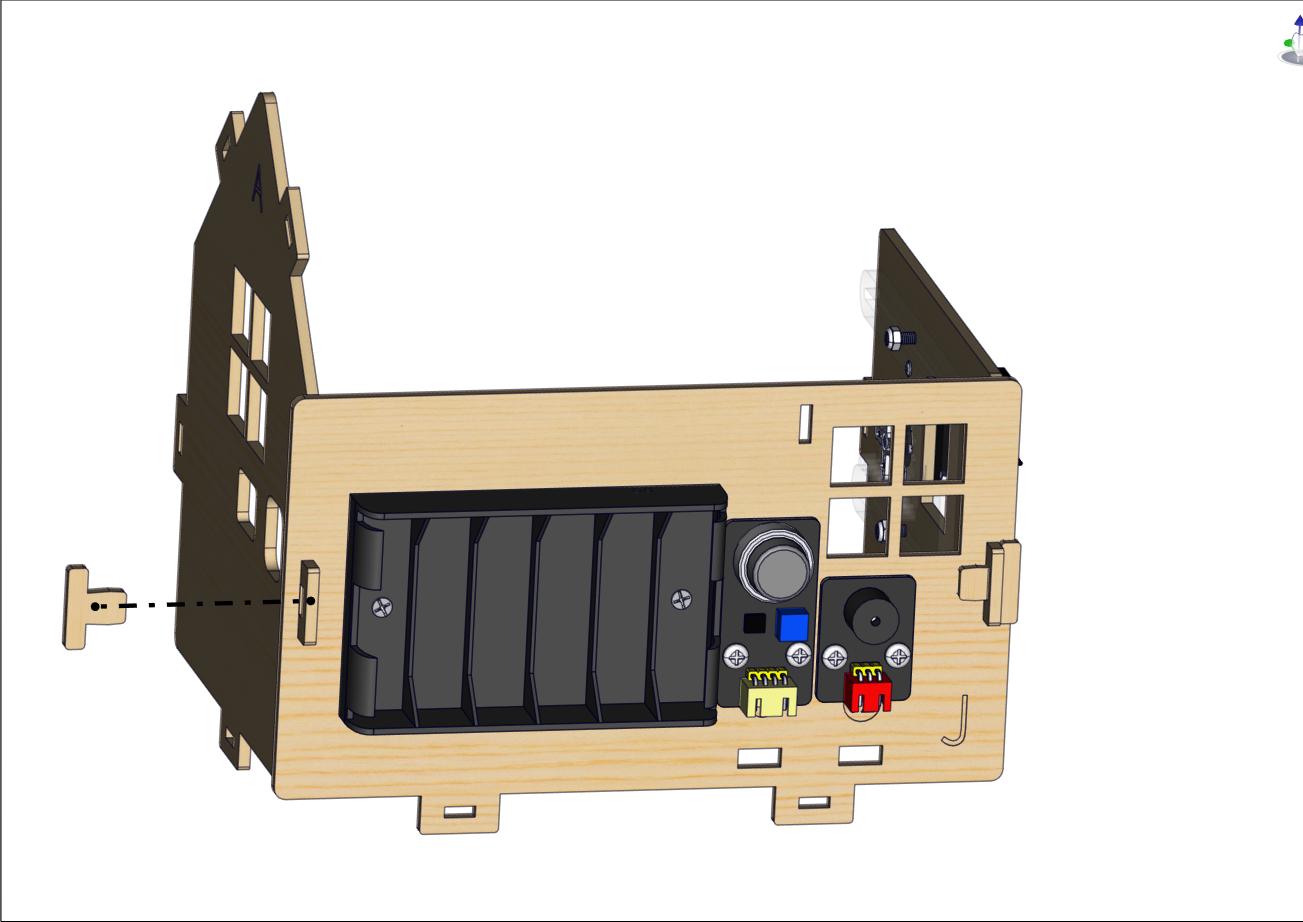
安装
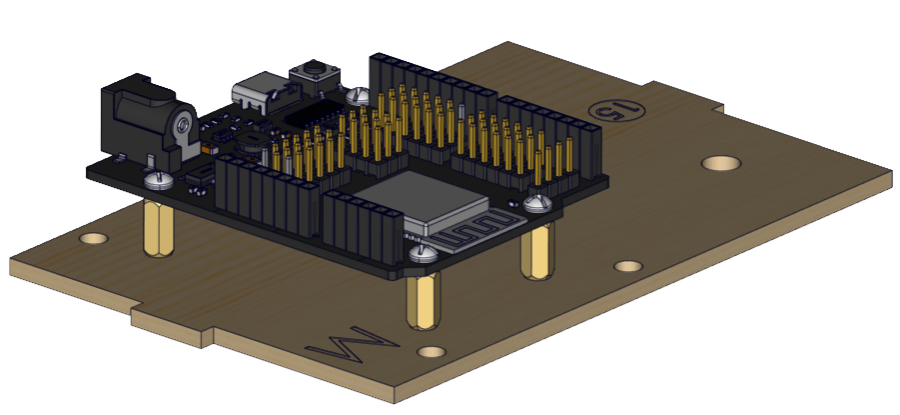
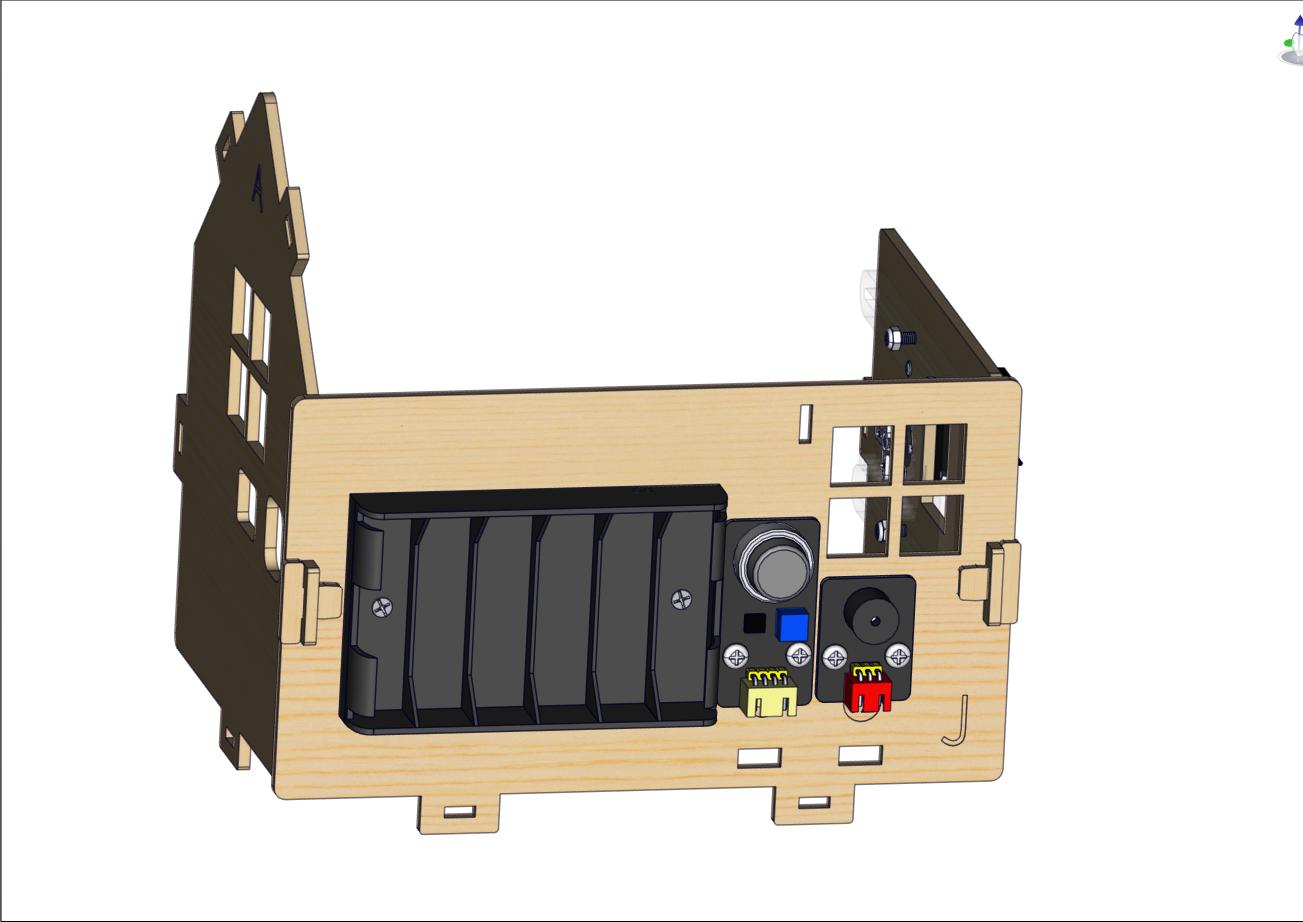
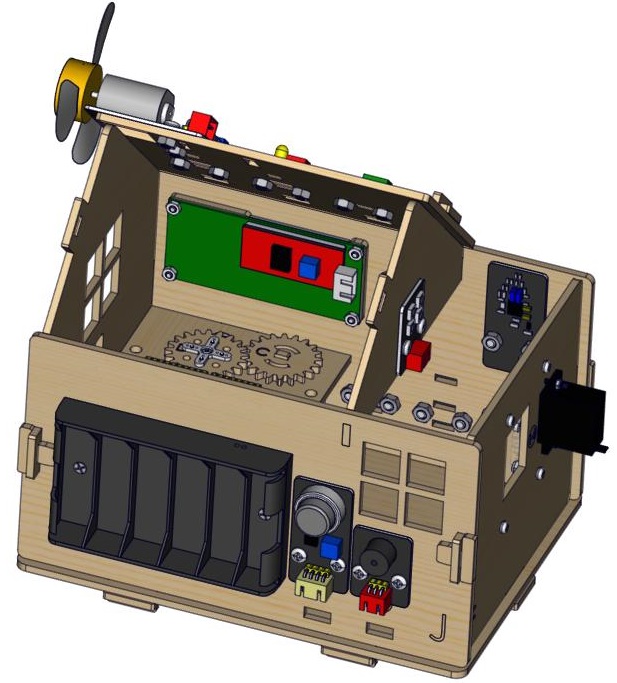
完成
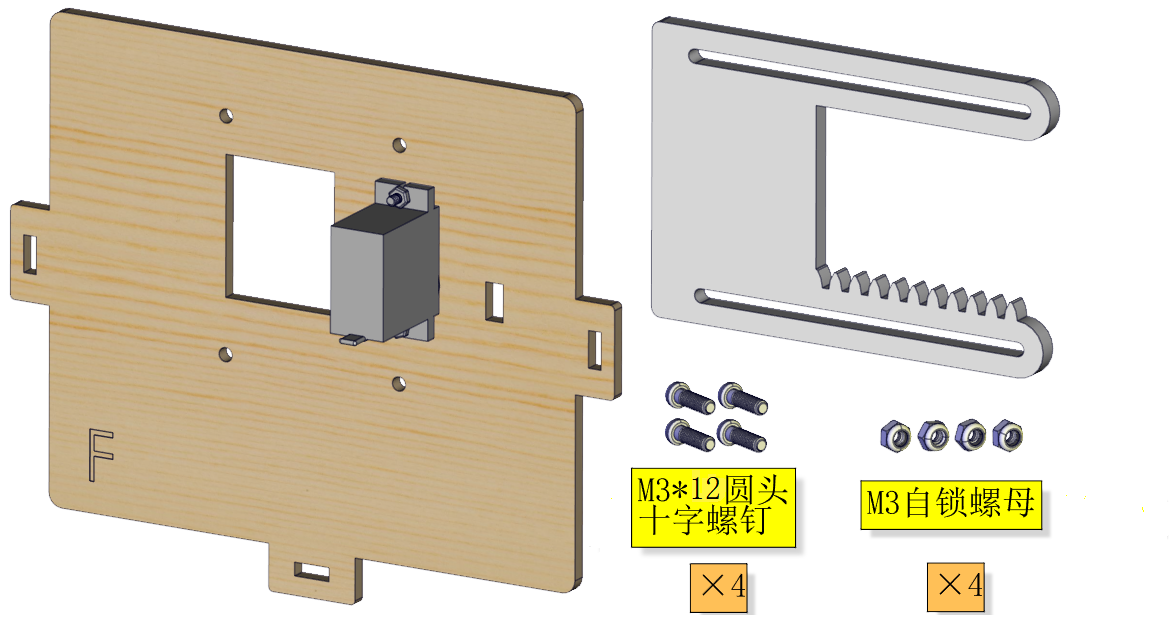
安装2
安装所需零件
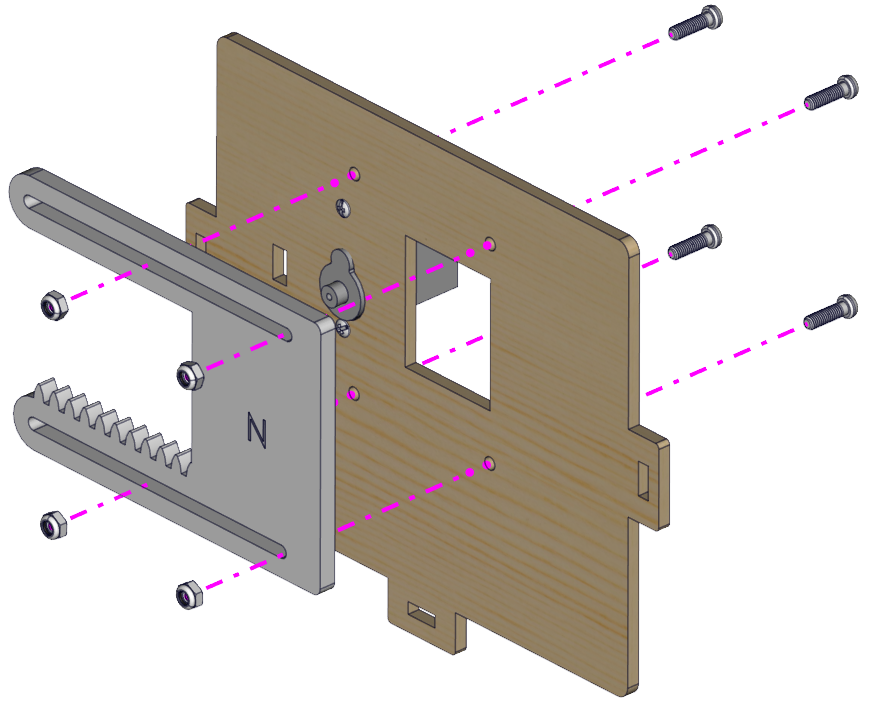
安装
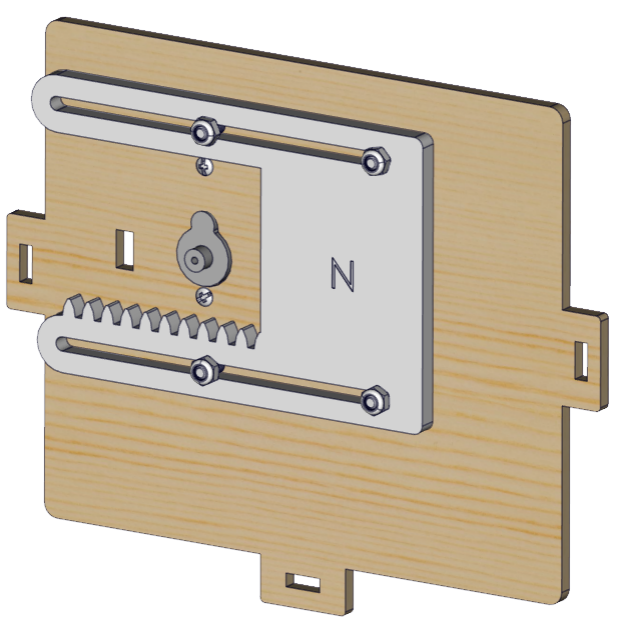
完成
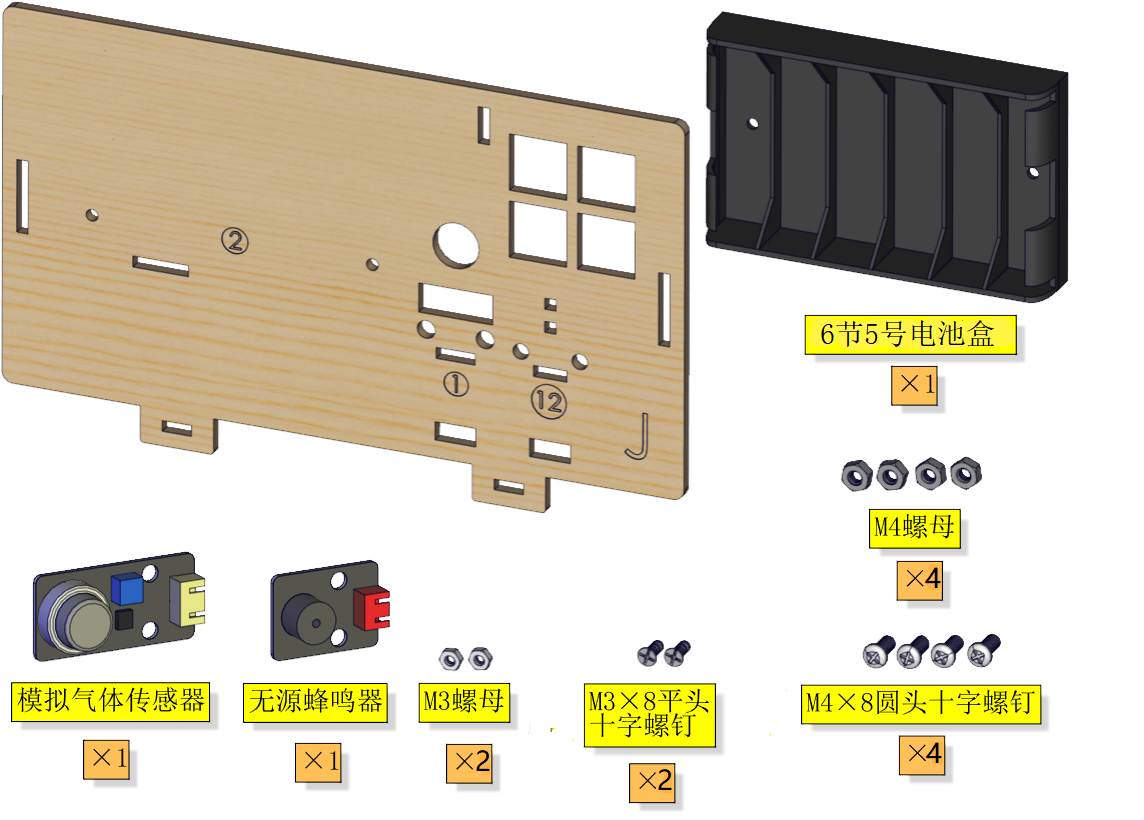
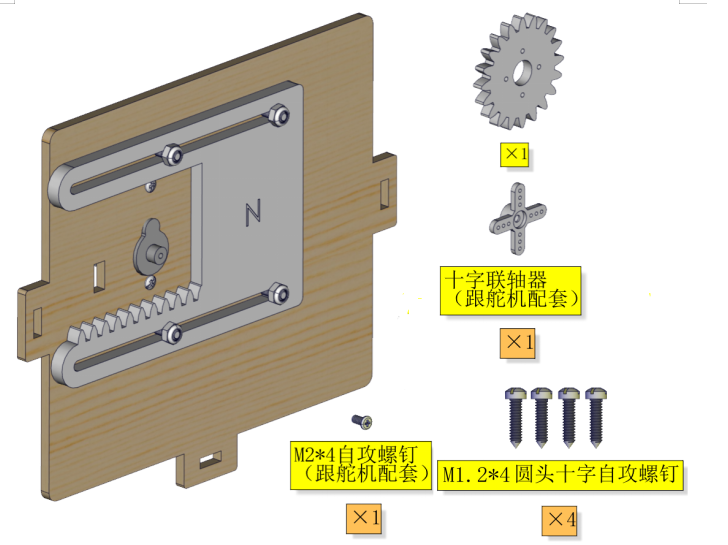
安装3
安装所需零件
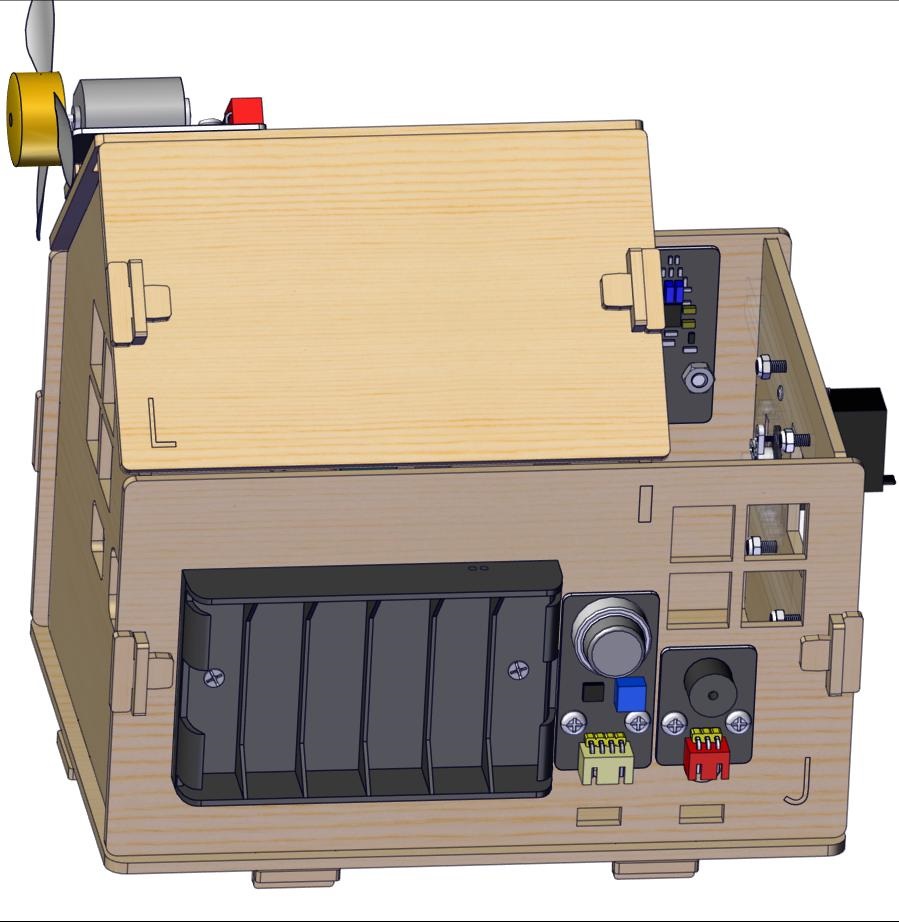
安装(注意电池盒线材朝下安装)
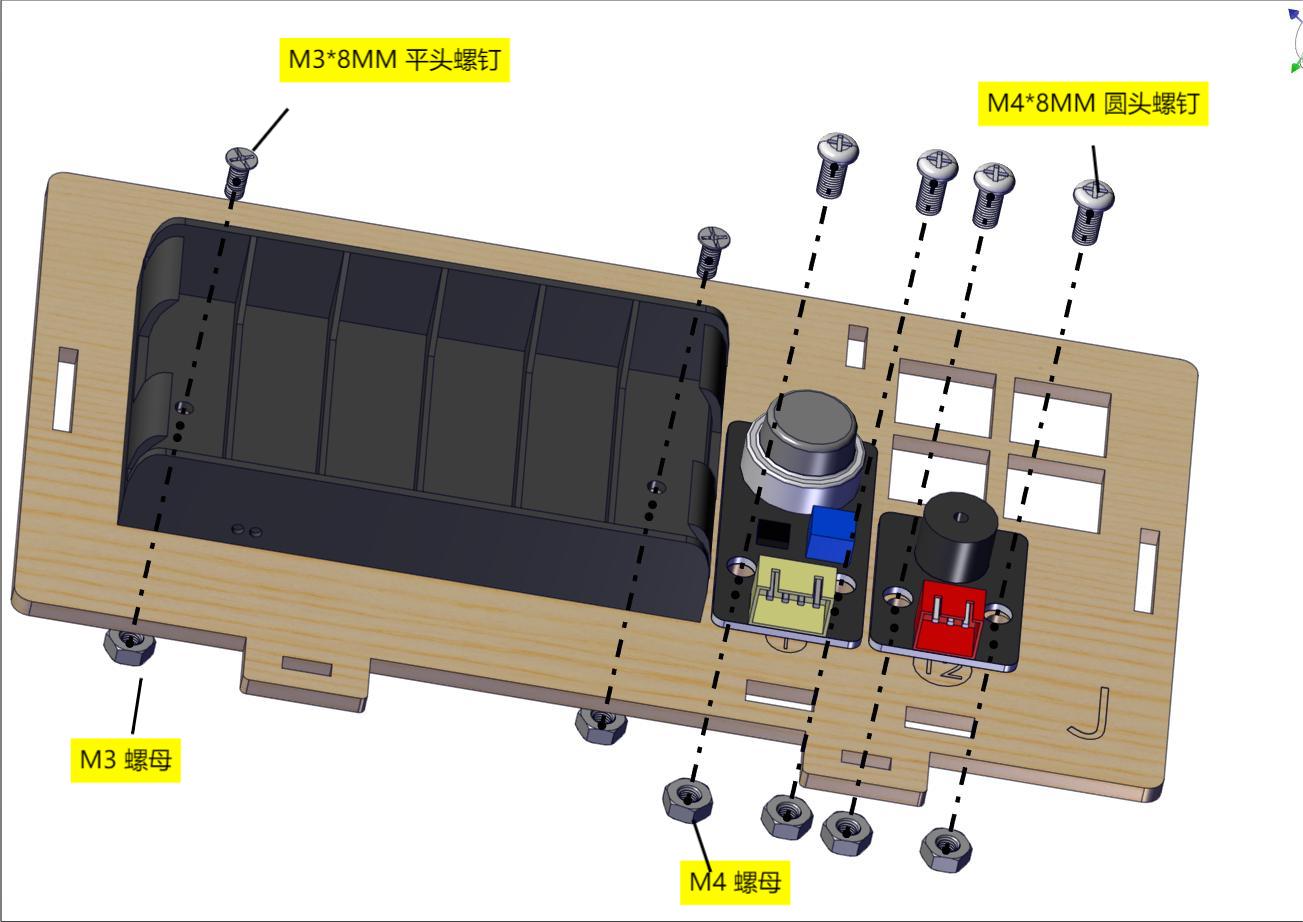
完成

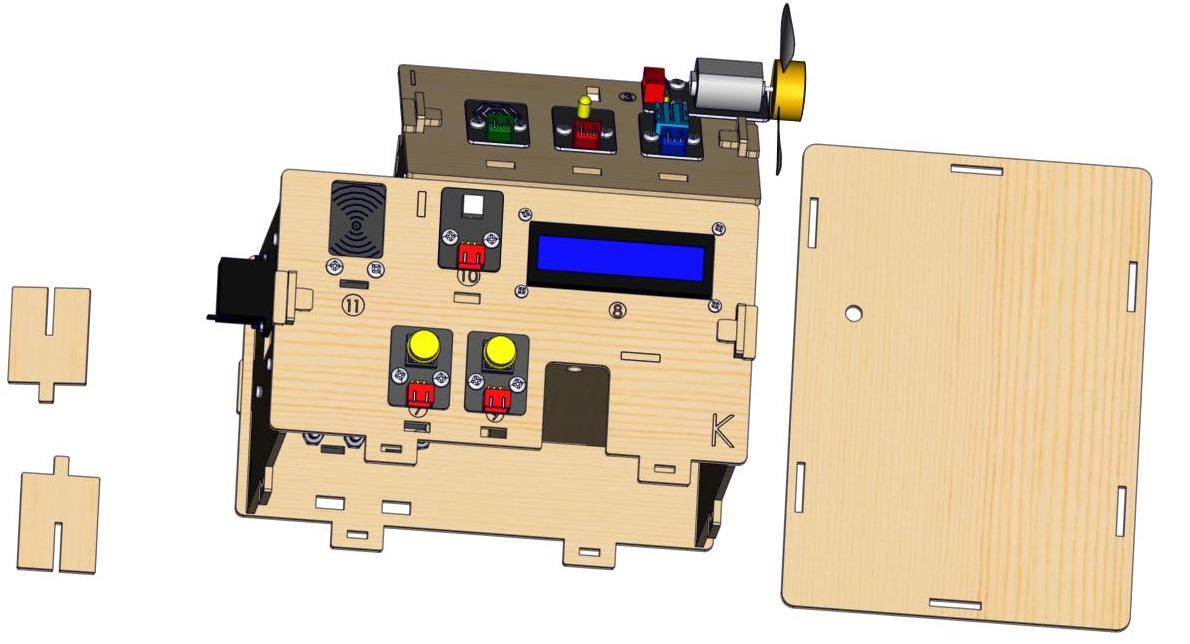
安装4
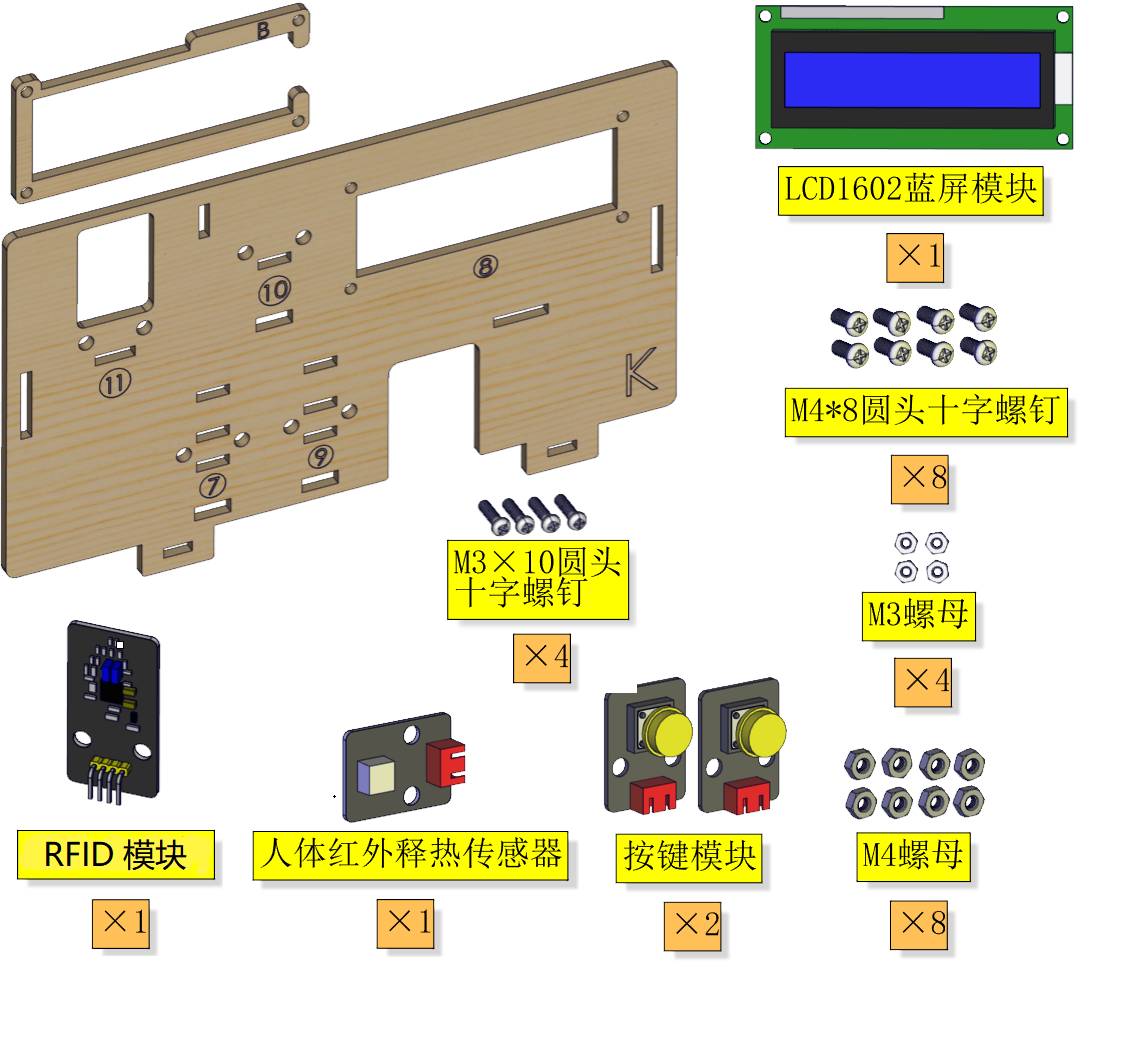
安装所需零件
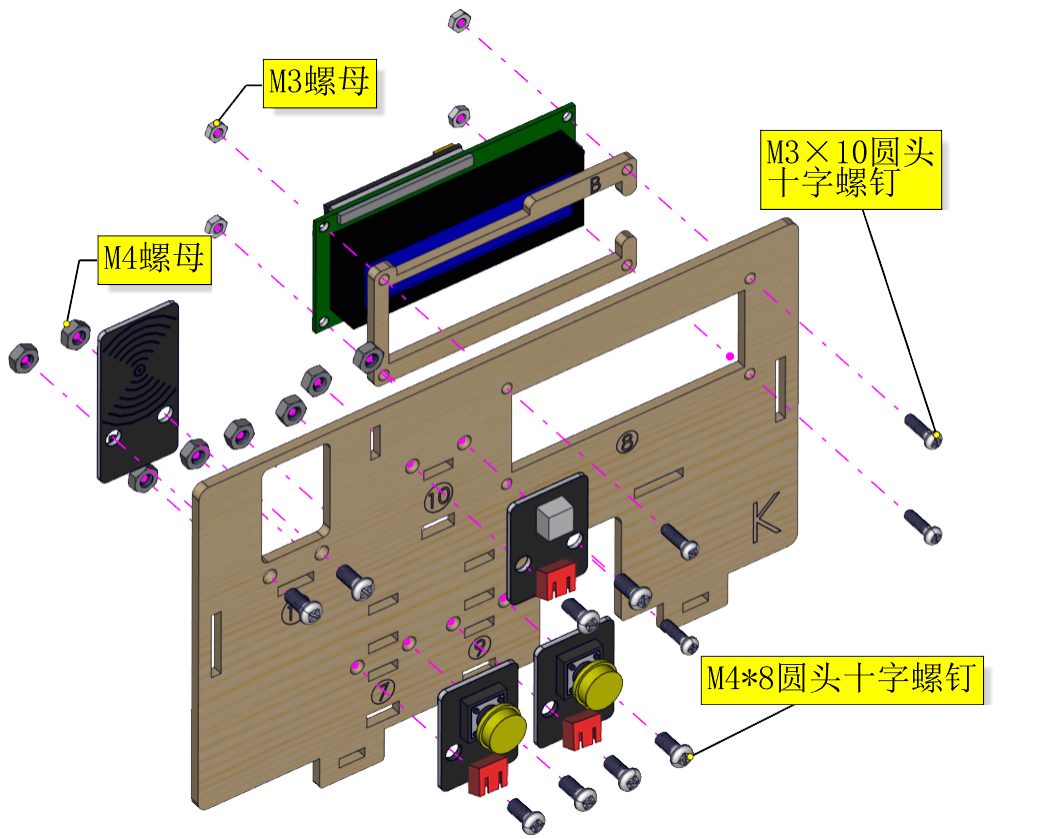
安装
完成
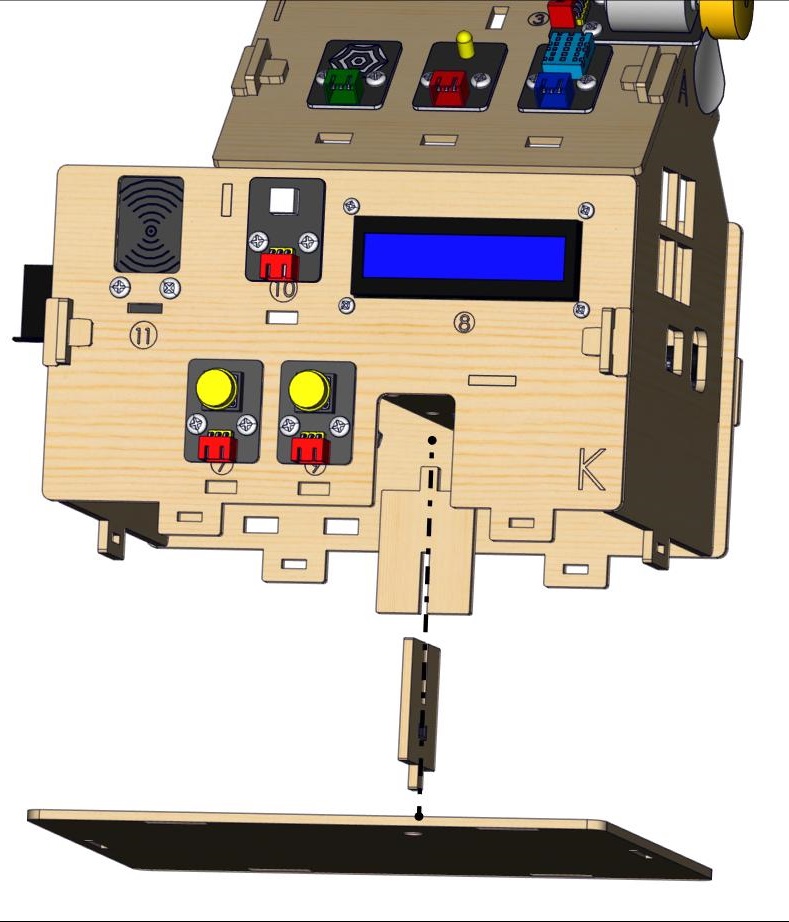
安装5
安装所需零件
安装
完成
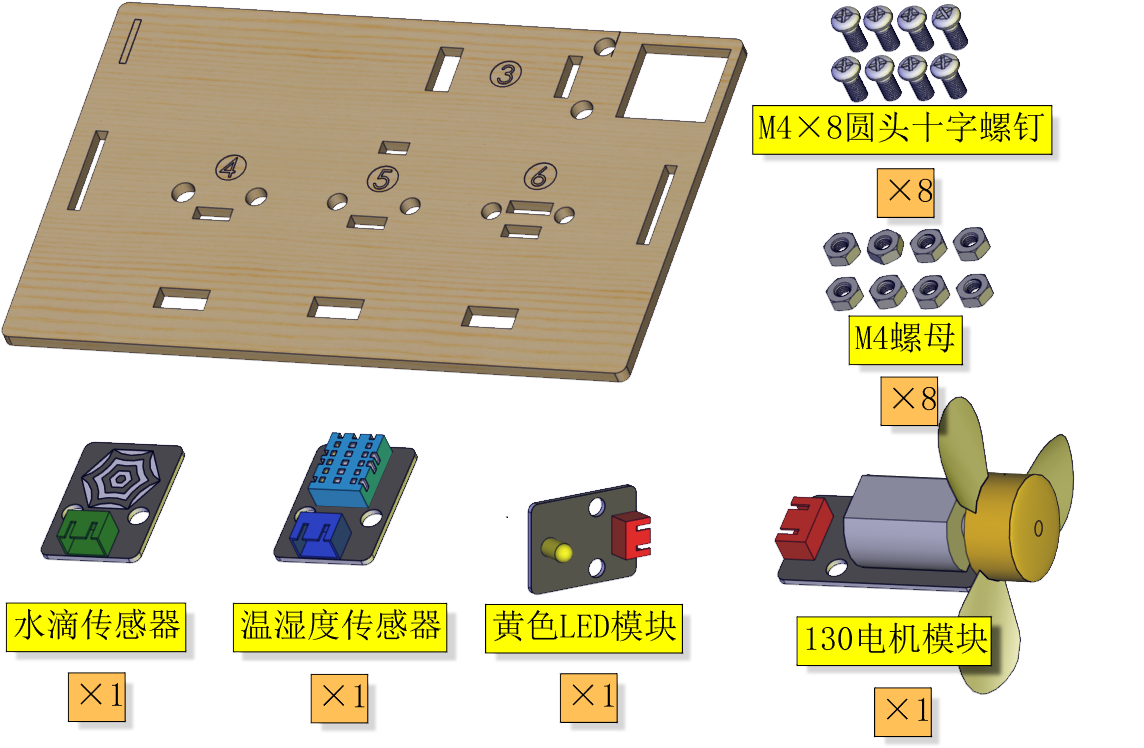
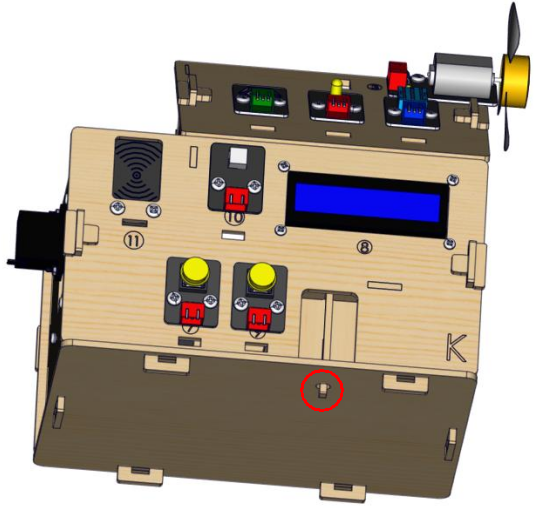
安装6
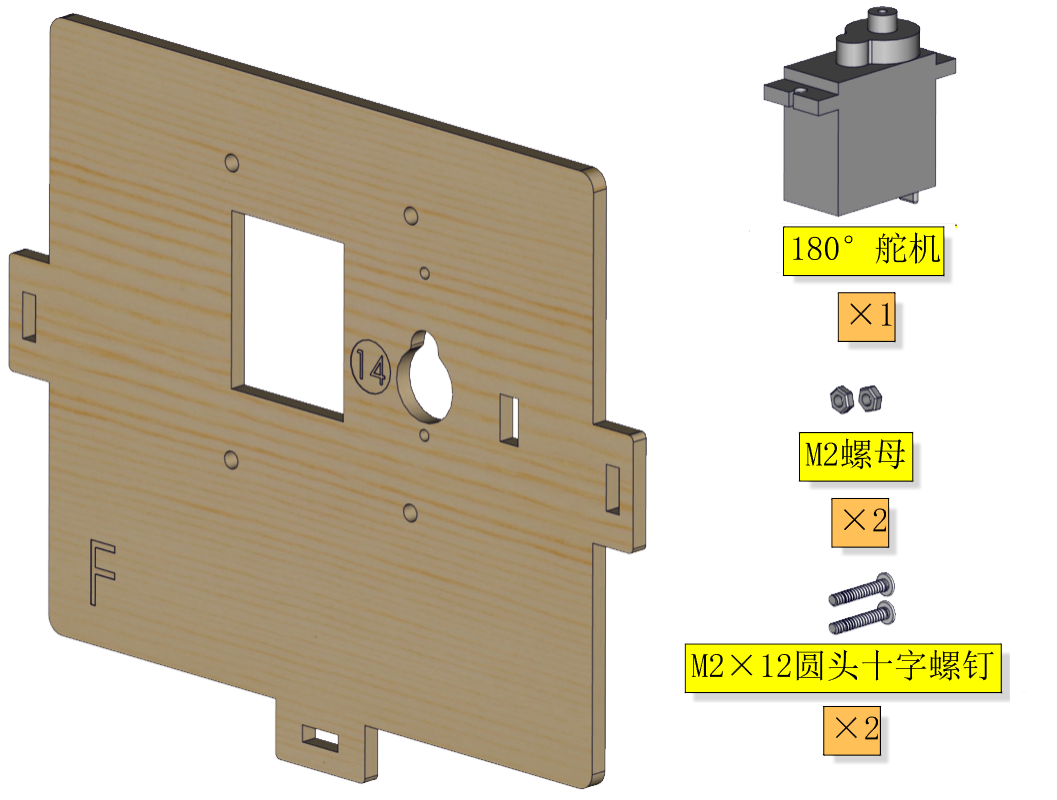
安装所需零件
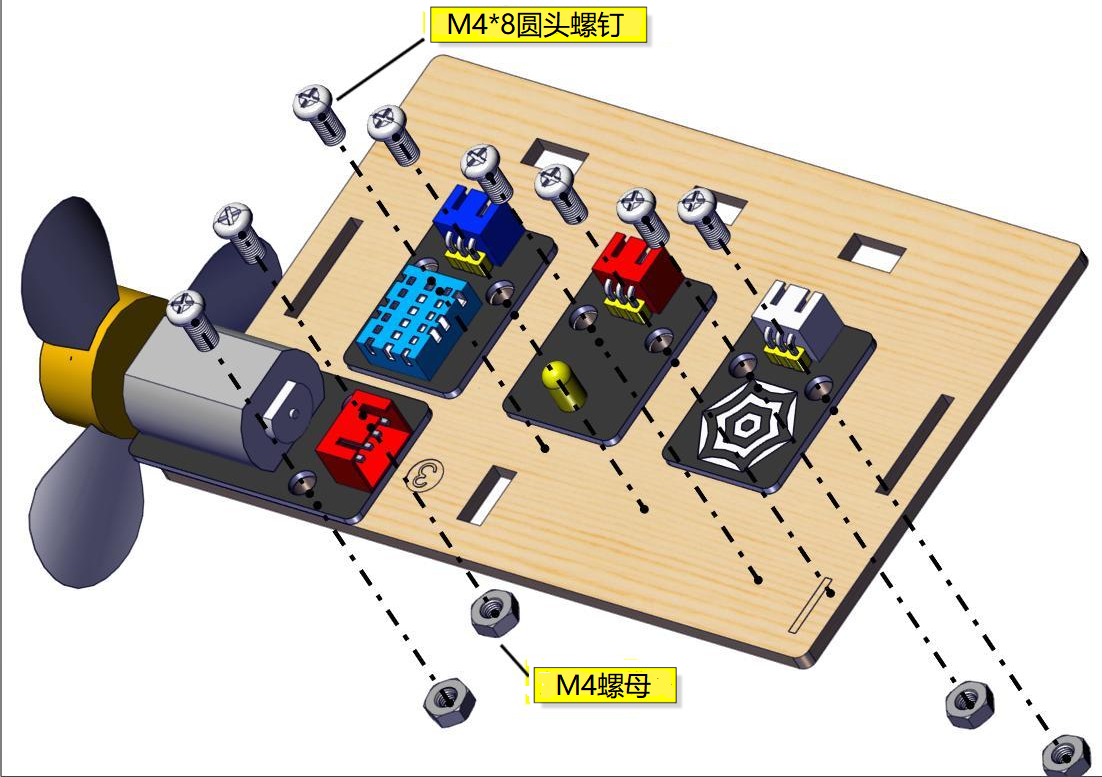
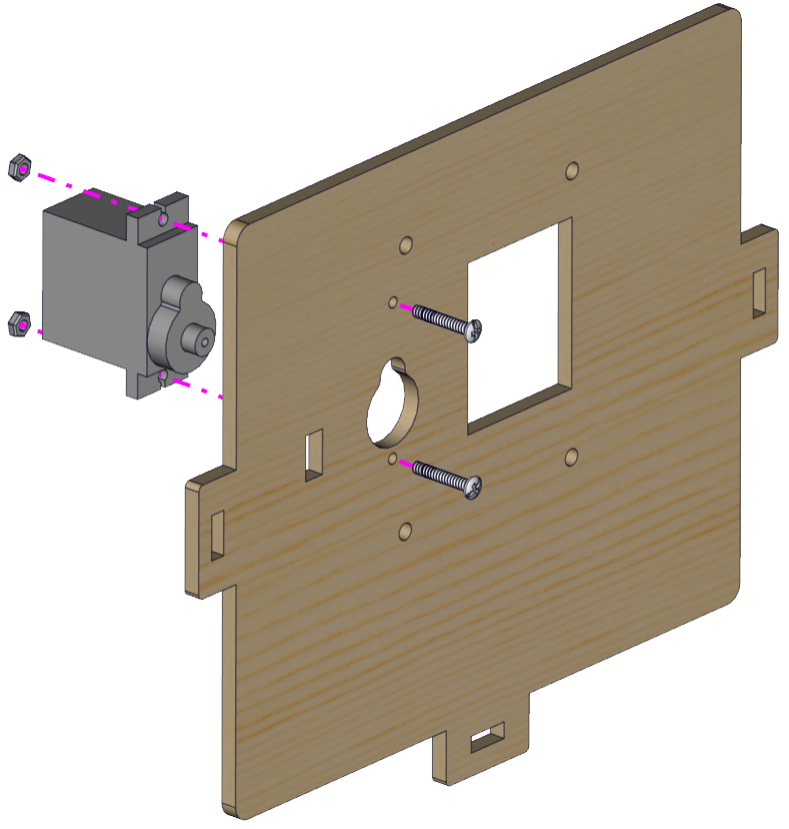
安装(注意自锁螺母不可拧紧)
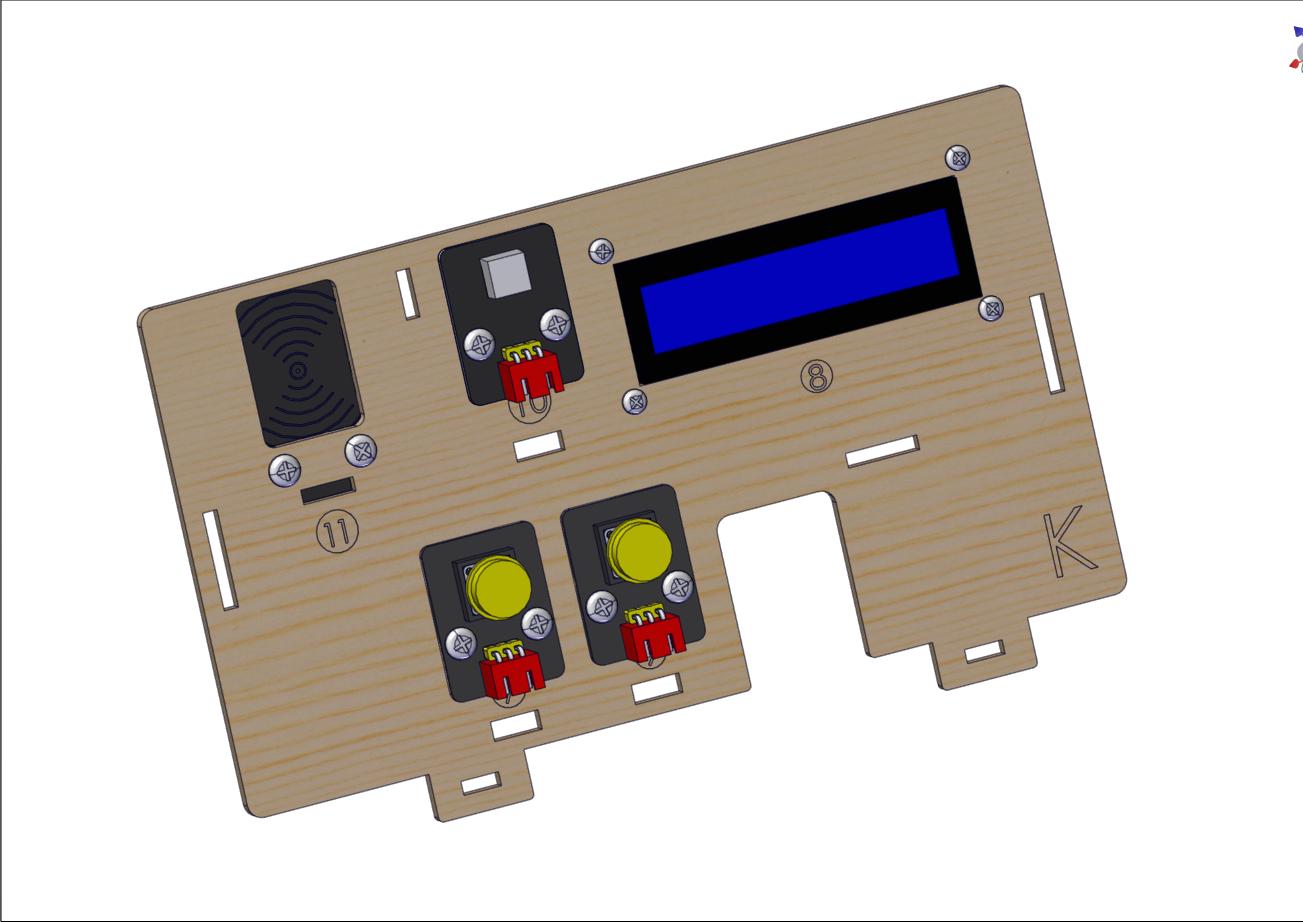
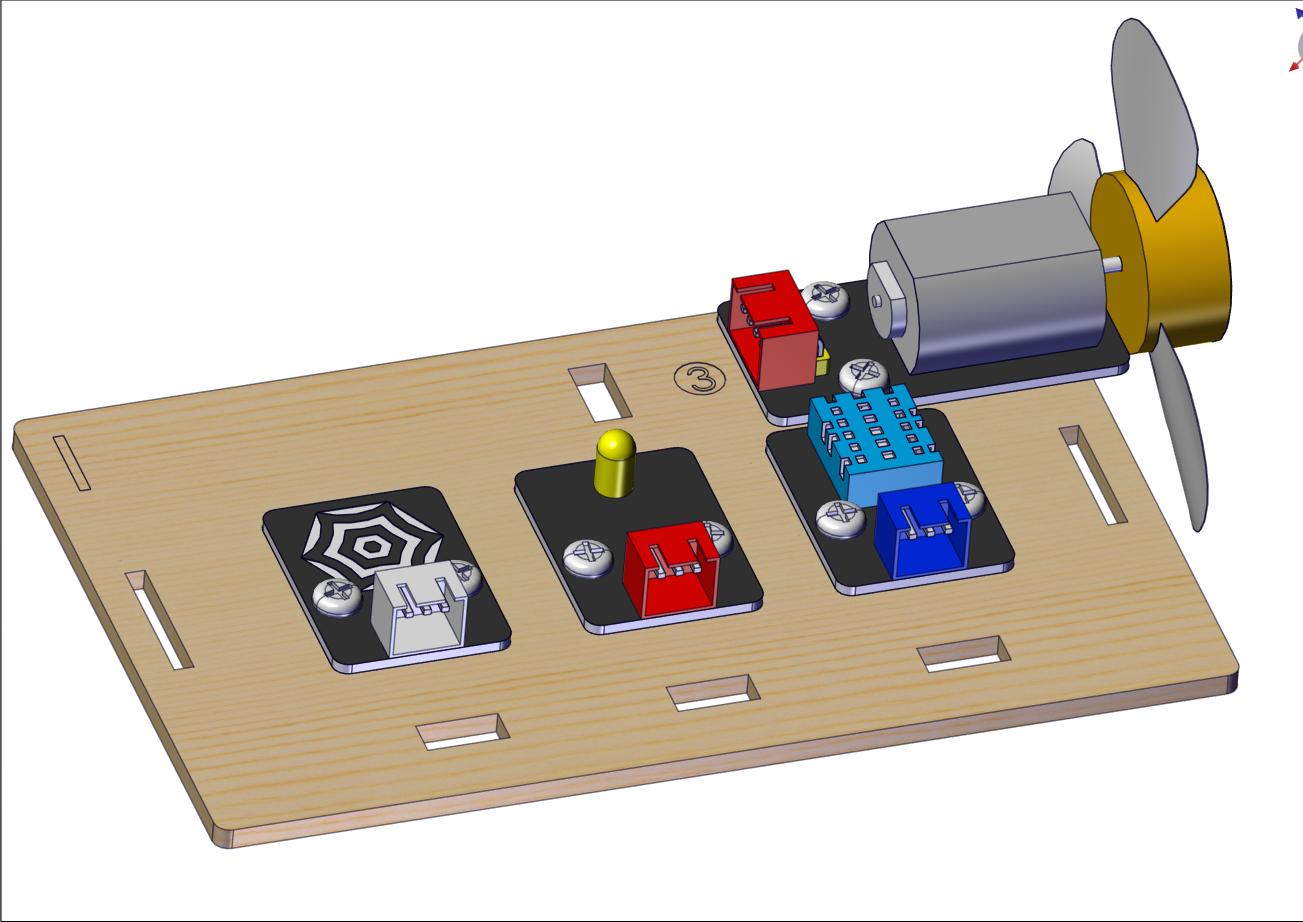
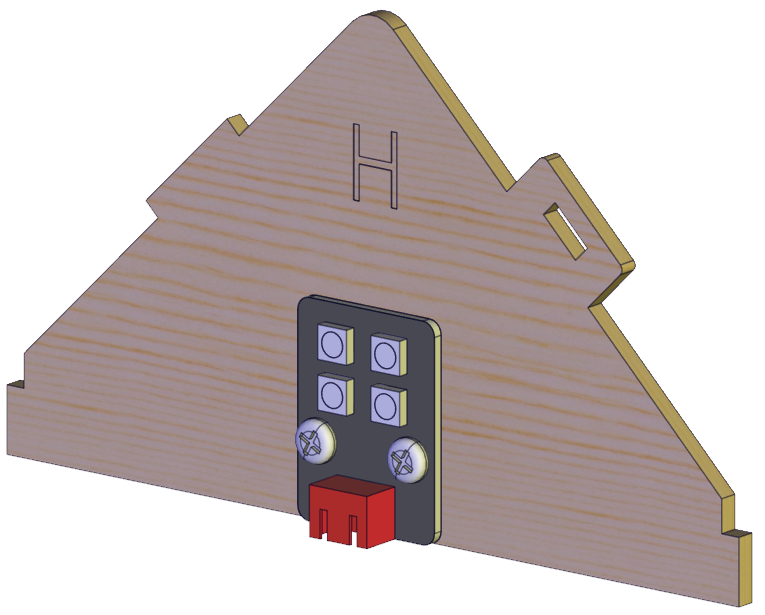
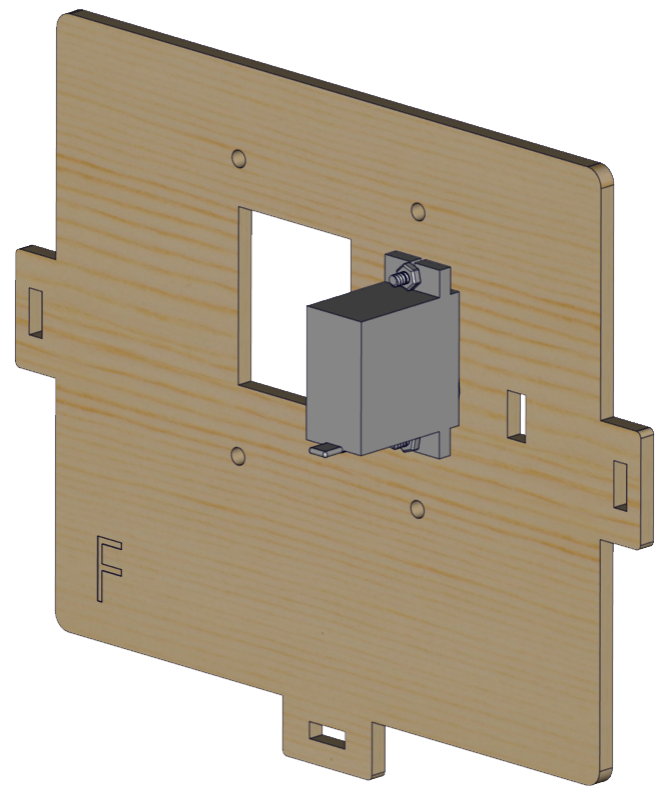
完成
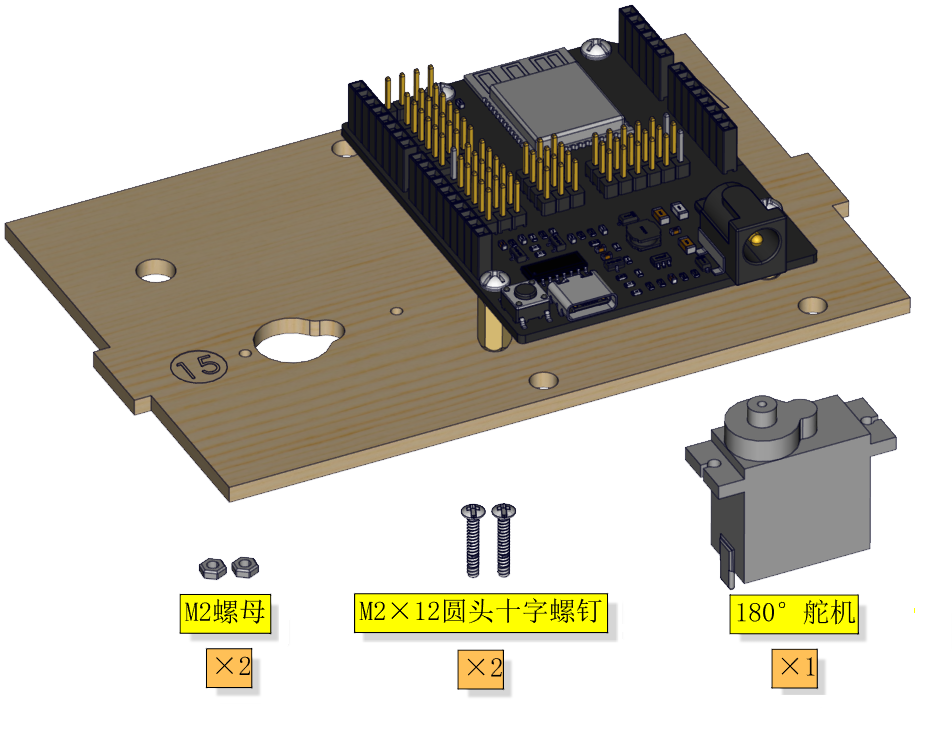
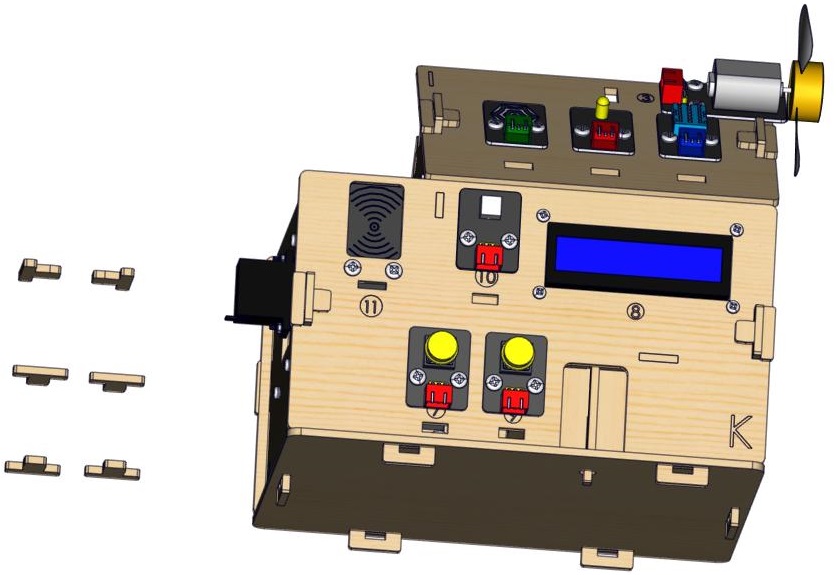
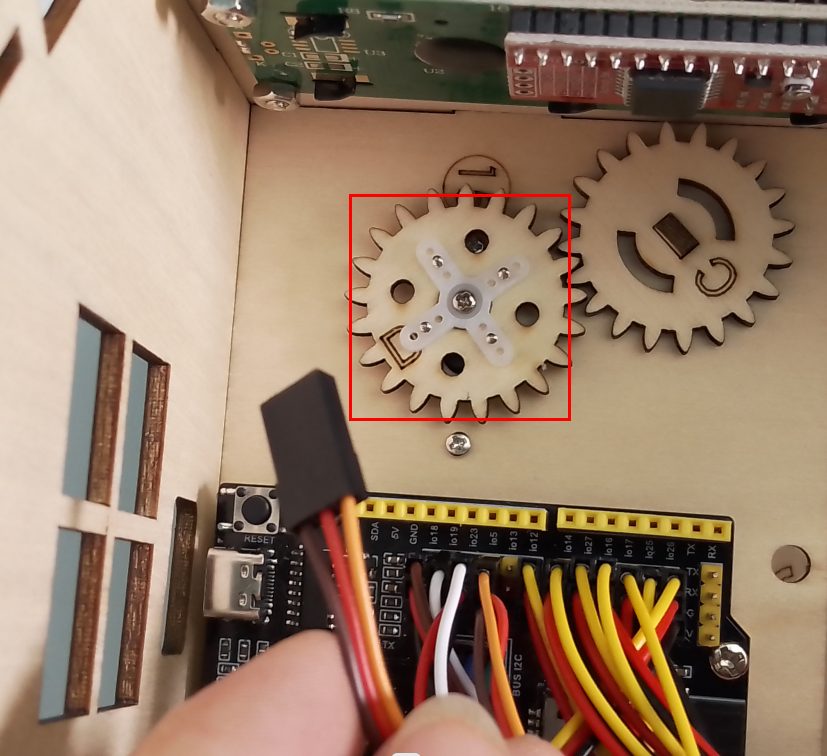
安装7
安装所需零件
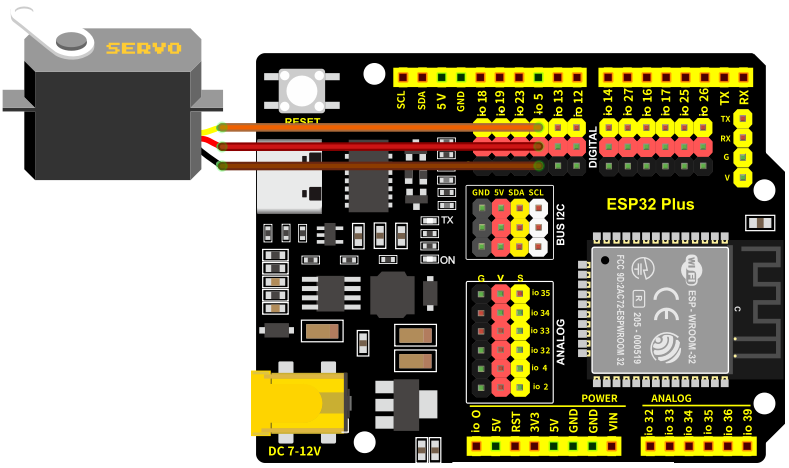
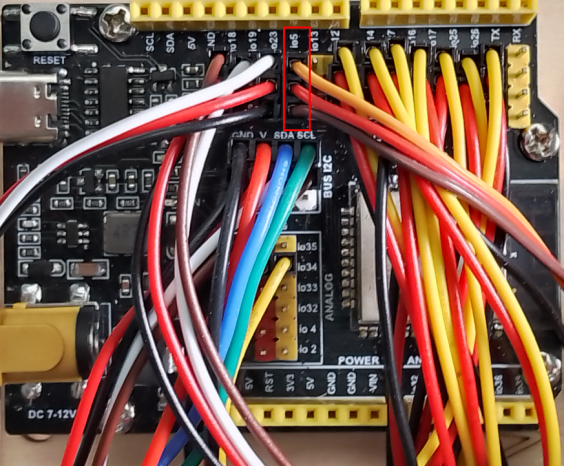
⚠️ 安装前需要调节舵机角度,我们需要将窗户的舵机调整到0度再安装
舵机 |
主板 |
|---|---|
棕线 |
G |
红线 |
V |
橙黄线 |
IO5 |
⚠️ 请先下载调节窗户上舵机角度的代码:窗户上的舵机初始化角度_代码,保存至您方便使用的路径下。

⚠️ 特别提醒: 以下四种方法,根据自己的情况自由选择。
方法一:Arduino 代码
⚠️特别提示: 在编写代码并上传之前,必须安装Arduino IDE,请进入链接:Arduino IDE开发环境设置
/*
* 文件名 : window_servo
* 功能 : 初始化舵机的角度为0°
* 编译IDE:ARDUINO IDE
* 作者 : https://www.keyesrobot.cn/
*/
#include <ESP32Servo.h>
Servo myservo;
#define servoPin 5
void setup() {
myservo.attach(servoPin,500,2500);
myservo.write(0);
delay(300);
myservo.write(90);
delay(300);
myservo.write(0);
delay(300);
}
void loop() {
// put your main code here, to run repeatedly:
}
如何得到它?
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 …\窗户上的舵机初始化角度_代码 ,打开文件window_servo.ino。或将上述测试代码复制粘贴到Arduino IDE中。
将上述测试代码上传至主板之后,未发现舵机转动,可以按下主板上的复位键。
方法二:Python 代码
⚠️特别提示: 在编写代码并上传之前,必须安装 Thonny IDE,请进入链接:Thonny IDE开发环境设置
# 作者 : www.keyes-robot.com
from machine import Pin, PWM
import time
pwm = PWM(Pin(5))
pwm.freq(50)
'''
与角度对应的占空比
0°----2.5%----25
45°----5%----51.2
90°----7.5%----77
135°----10%----102.4
180°----12.5%----128
'''
angle_0 = 25
angle_90 = 77
angle_180 = 128
pwm.duty(angle_0)
time.sleep(1)
pwm.duty(angle_90)
time.sleep(1)
pwm.duty(angle_0)
time.sleep(1)
# while True:
如何得到它?
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 …\窗户上的舵机初始化角度_代码 ,打开文件window_servo.py。或将上述测试代码复制粘贴到Thonny IDE中。
单击 运行上述测试代码,未发现舵机转动,可以按下主板上的复位键。
运行上述测试代码,未发现舵机转动,可以按下主板上的复位键。
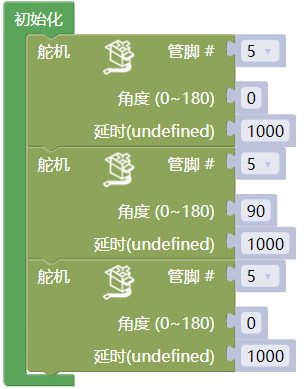
方法三:Mixly 代码
⚠️特别提示: 在编写代码并上传之前,必须安装 Mixly IDE,请进入链接:Mixly IDE开发环境设置
如何得到它?
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 …\窗户上的舵机初始化角度_代码 ,使用 Mixly IDE 打开文件window_servo.mix。或在Mixly IDE中直接拖动代码块编写上述测试代码。
上传上述测试代码,未发现舵机转动,可以按下主板上的复位键。
方法四:KidsBlock(Scratch) 代码
⚠️特别提示: 在编写代码并上传之前,必须安装 KidsBlock IDE,请进入链接:KidsBlock IDE开发环境设置

如何得到它?
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 …\窗户上的舵机初始化角度_代码 ,使用 KidsBlock IDE 打开文件window_servo.sb3。或在KidsBlock IDE中直接拖动代码块编写上述测试代码。
上传上述测试代码,未发现舵机转动,可以按下主板上的复位键。
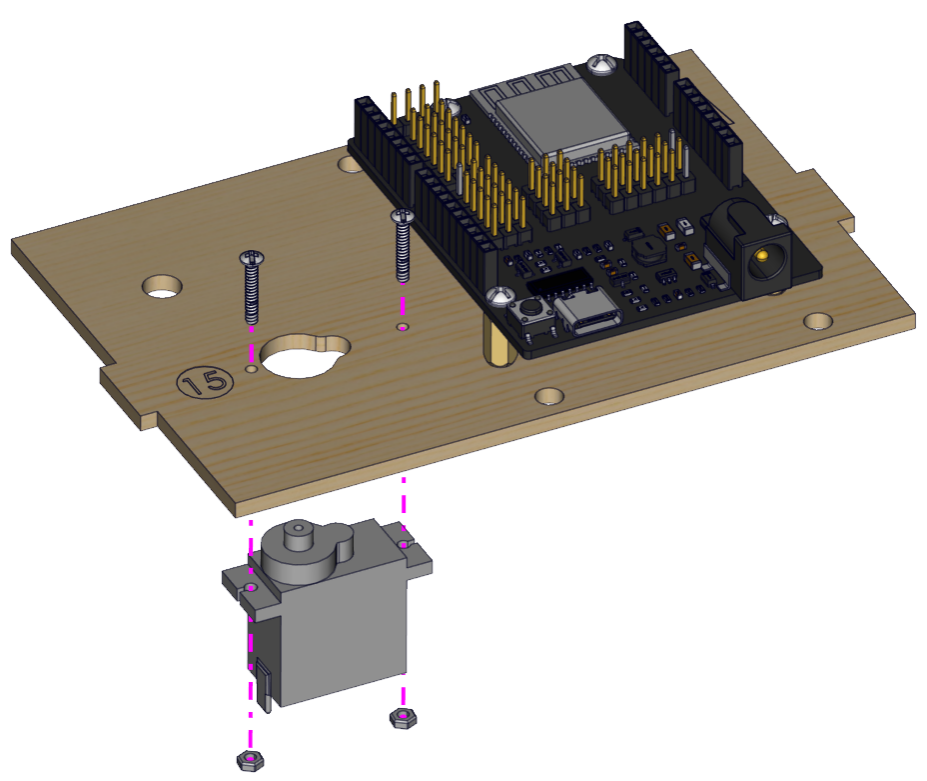
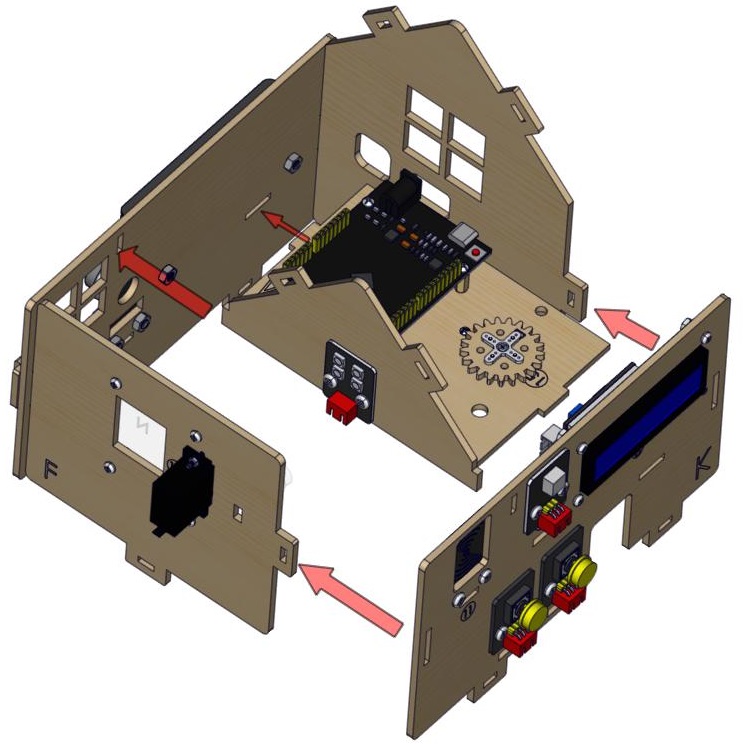
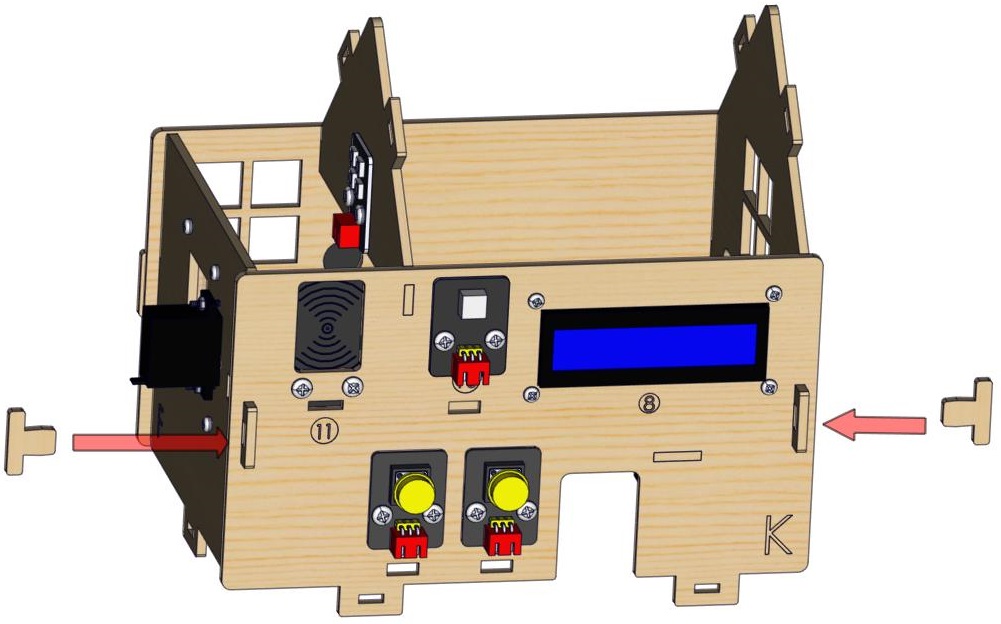
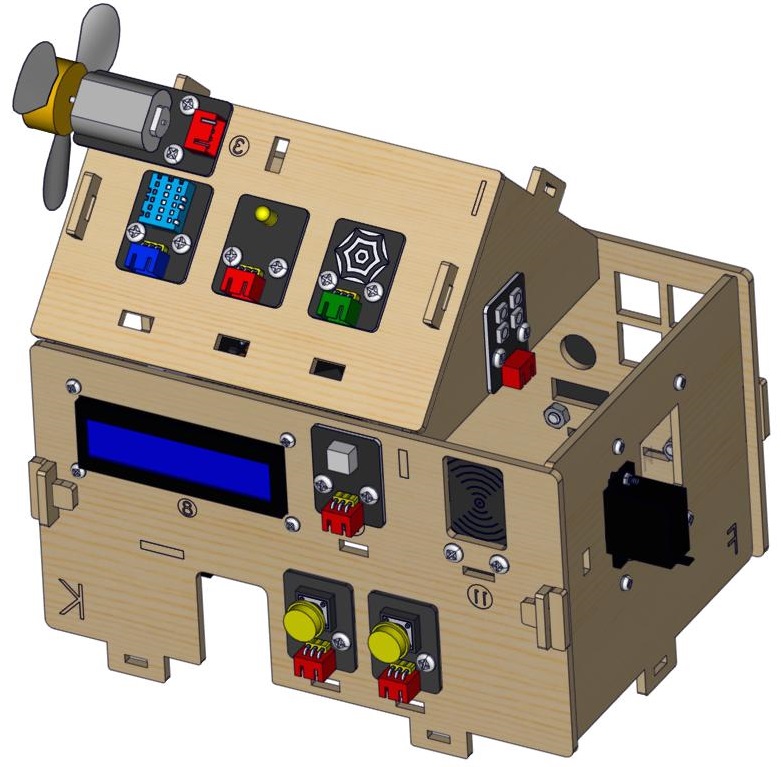
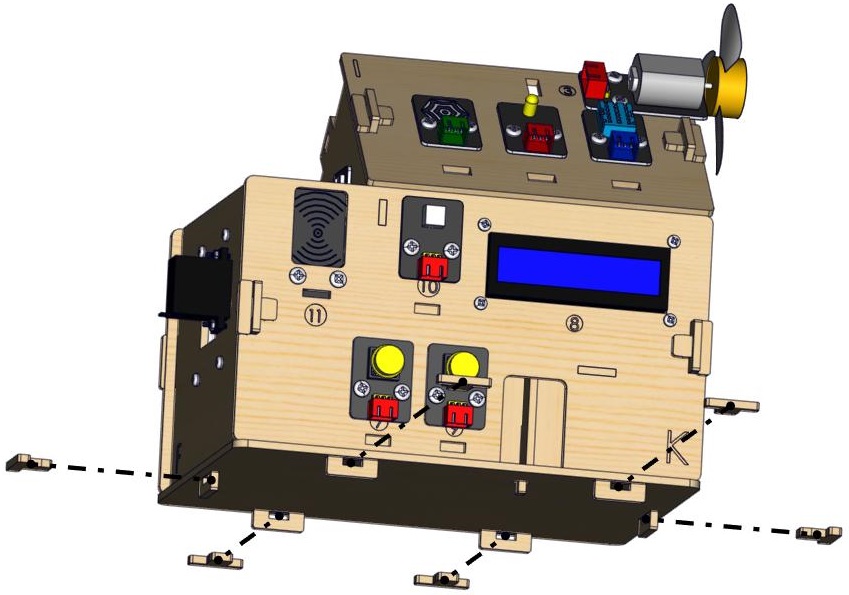
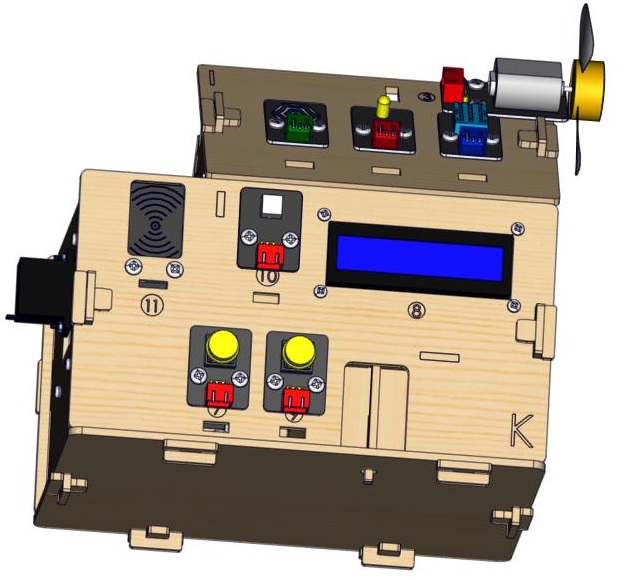
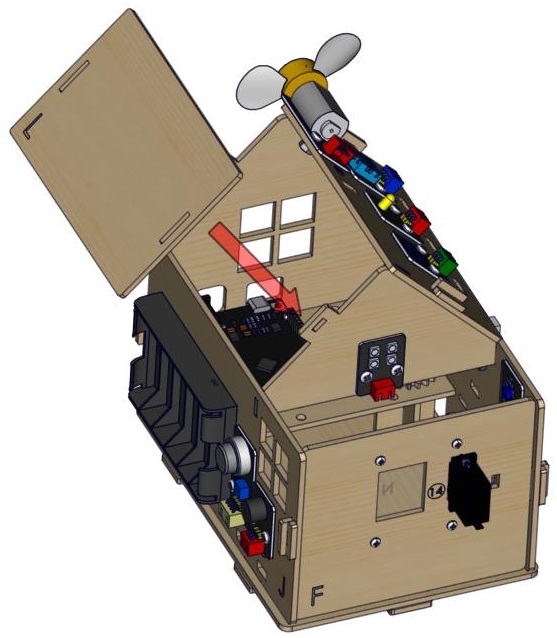
安装(需按照下图姿态安装)
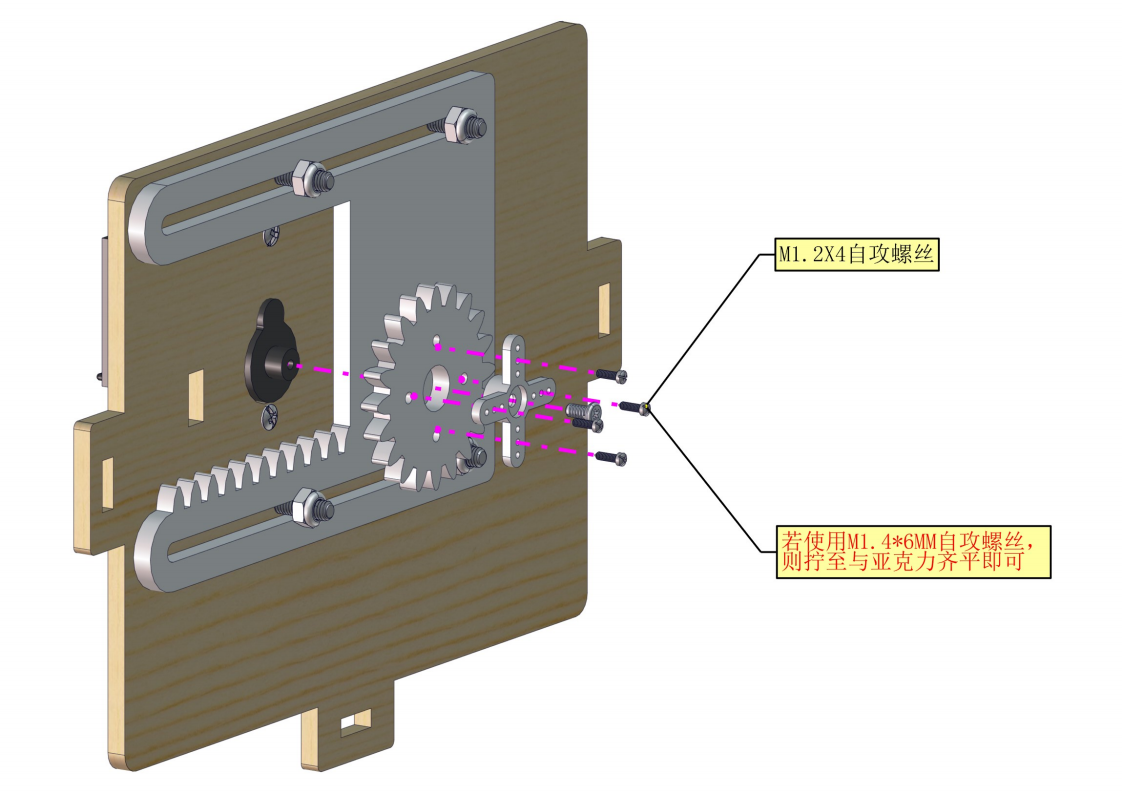
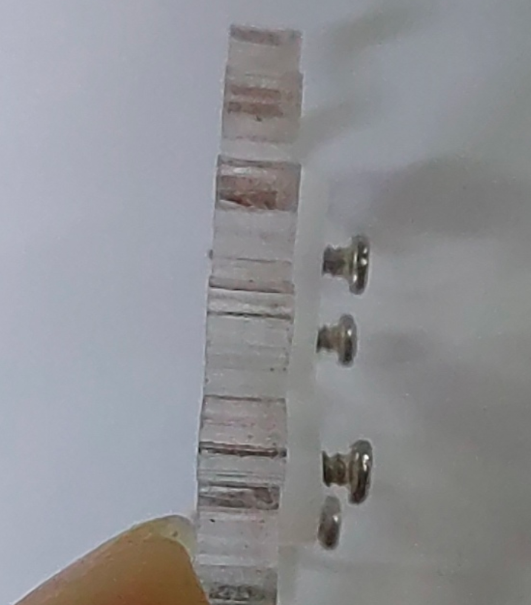
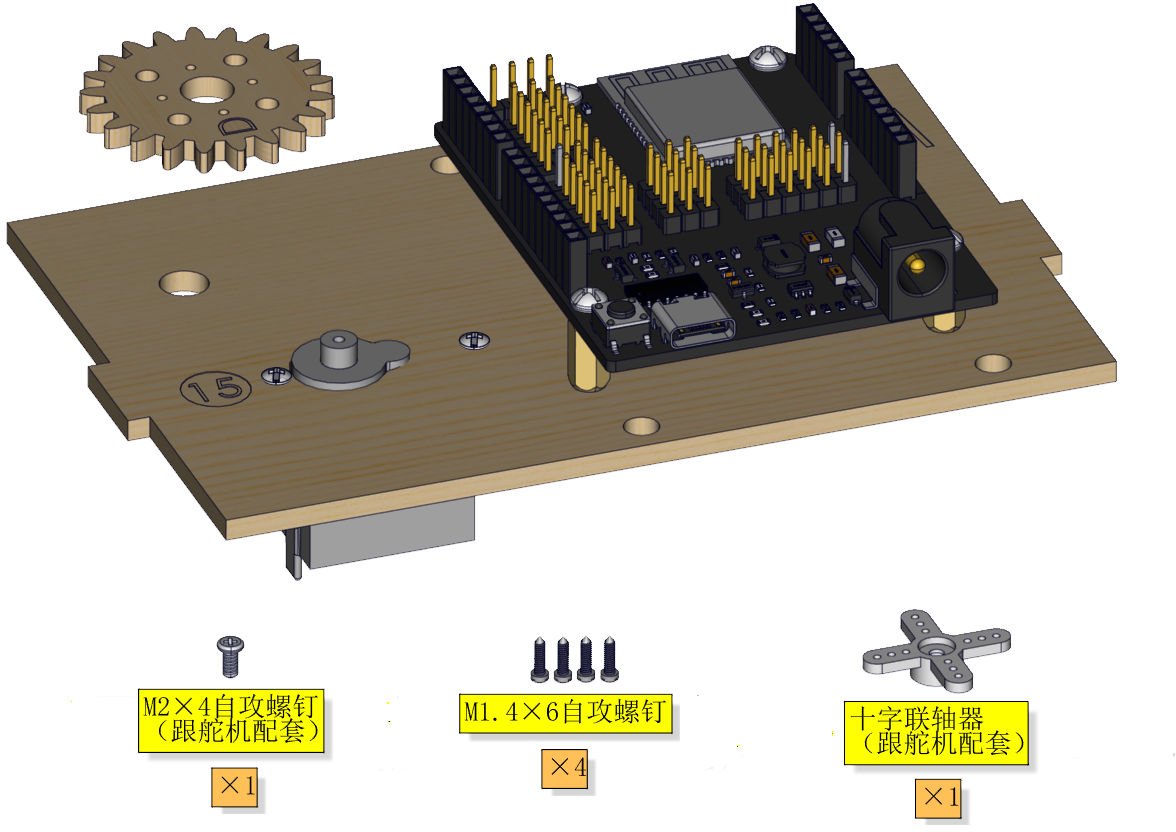
若使用为M1.4*6MM自攻螺丝时,如下图
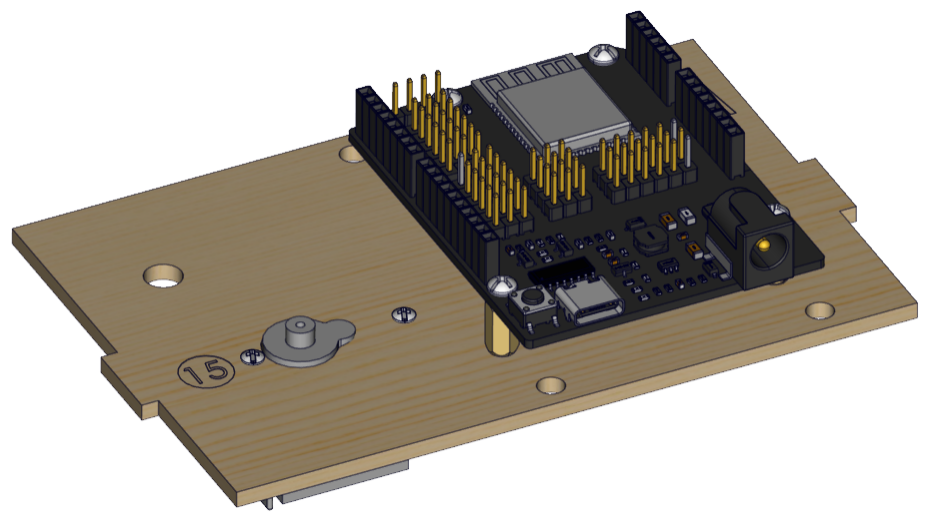
完成
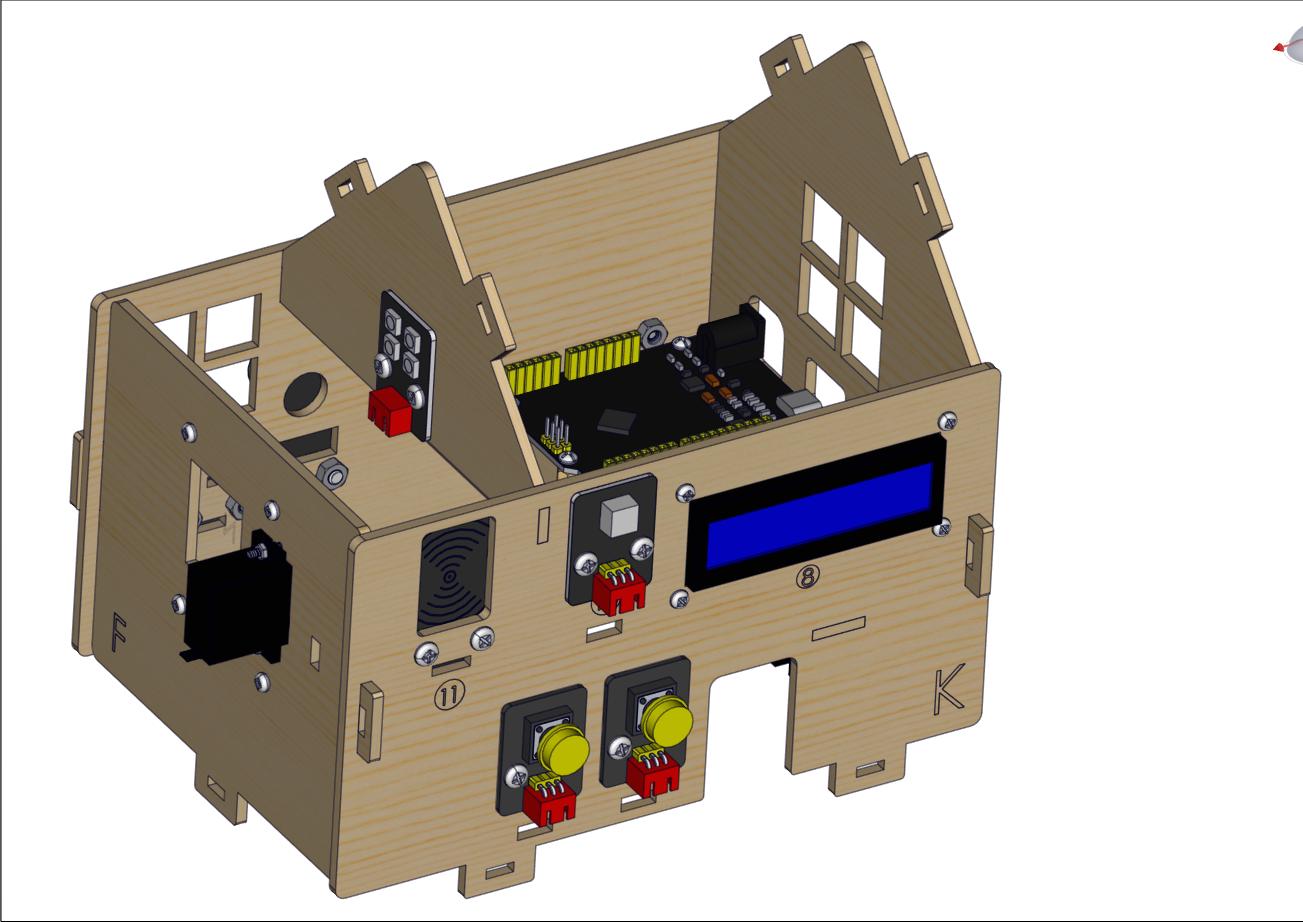
安装8
安装所需零件
安装
完成
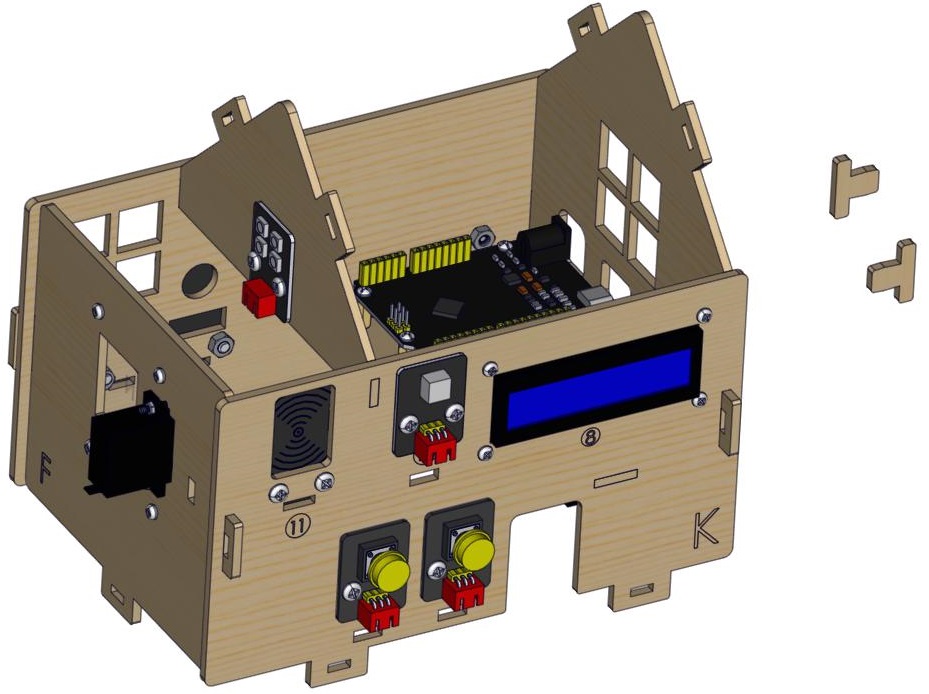
安装9
安装所需零件
安装
完成
安装10
安装所需零件
安装
完成
安装11
安装所需零件
安装
完成
安装12
安装所需零件
安装
完成
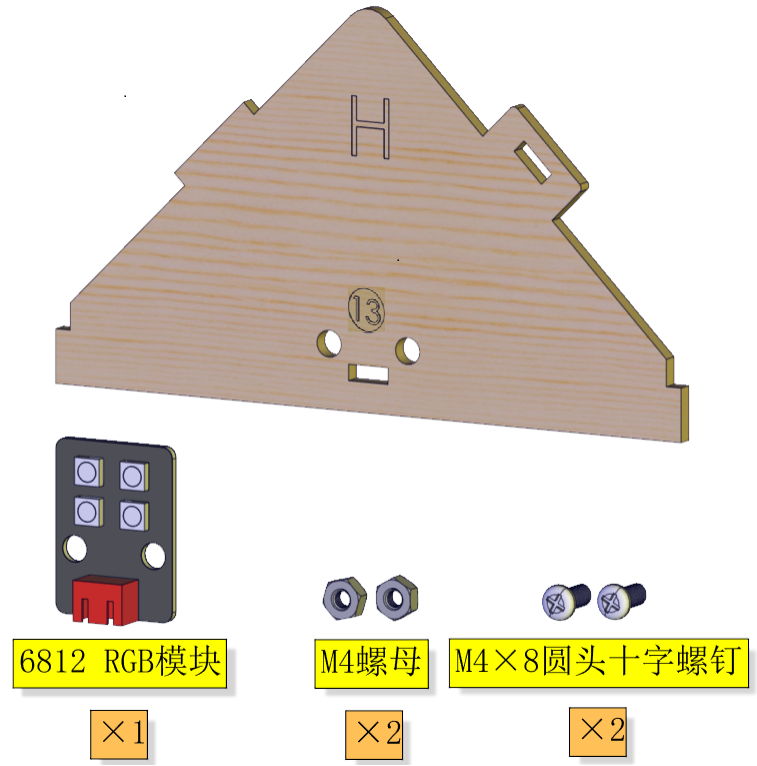
安装13
安装所需零件
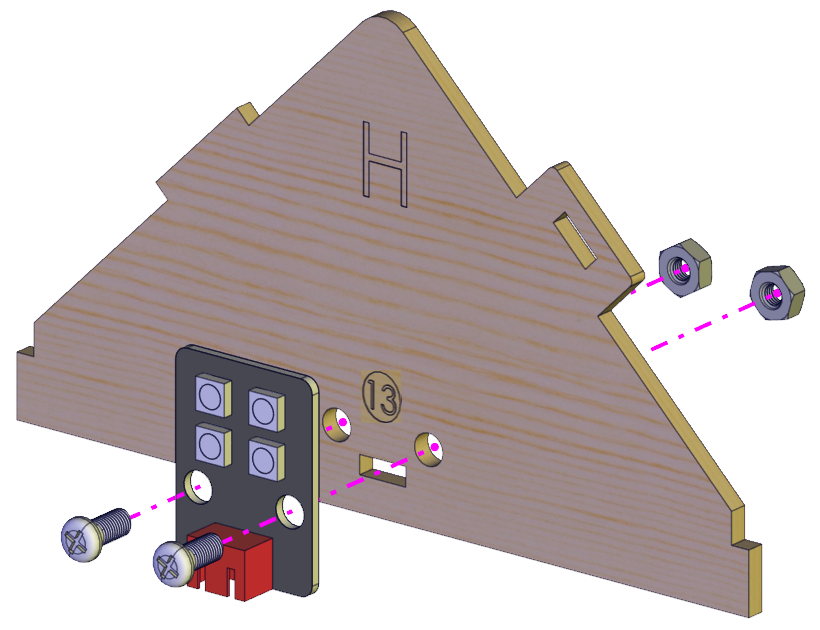
安装
完成
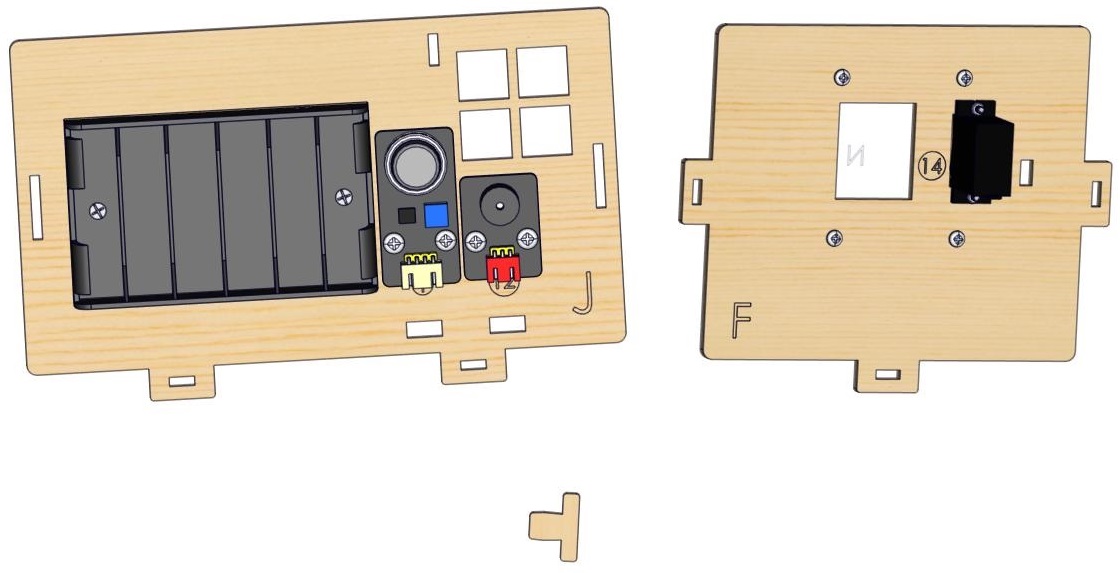
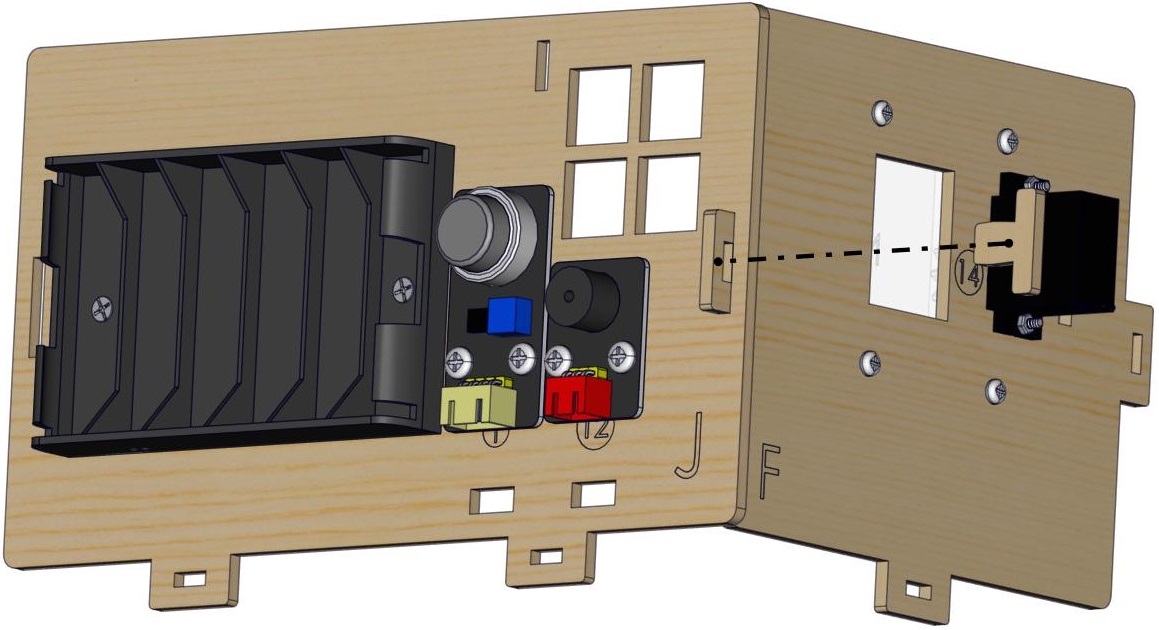
安装14
安装所需零件
安装
完成
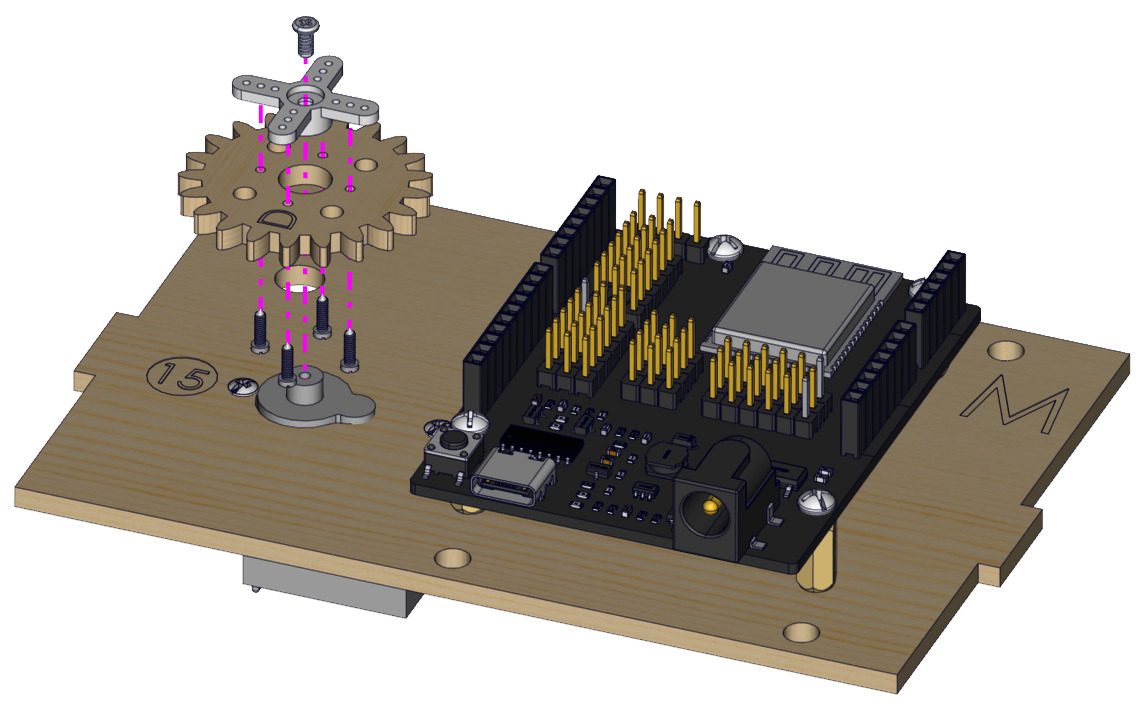
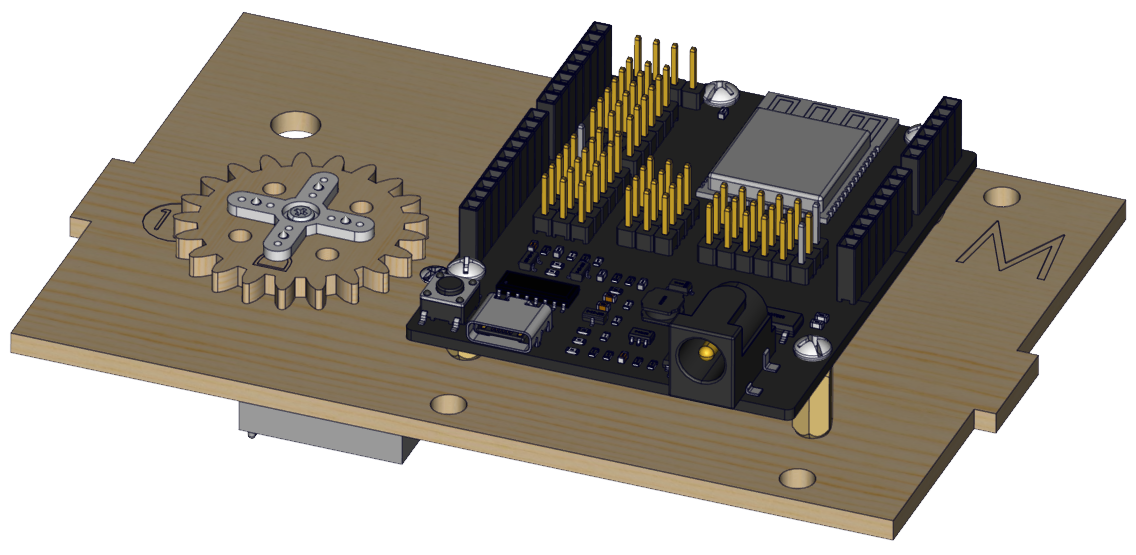
安装15
安装所需零件
安装
完成
安装16
安装所需零件
安装
完成
安装17
安装所需零件
安装
完成
安装18
安装所需零件
安装
完成
安装19
安装所需零件
安装
完成
接线部分
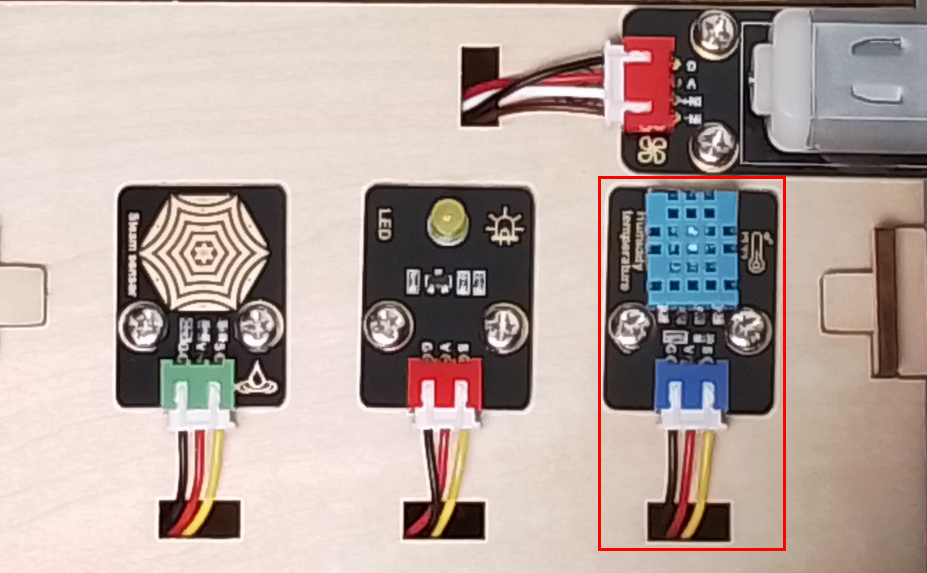
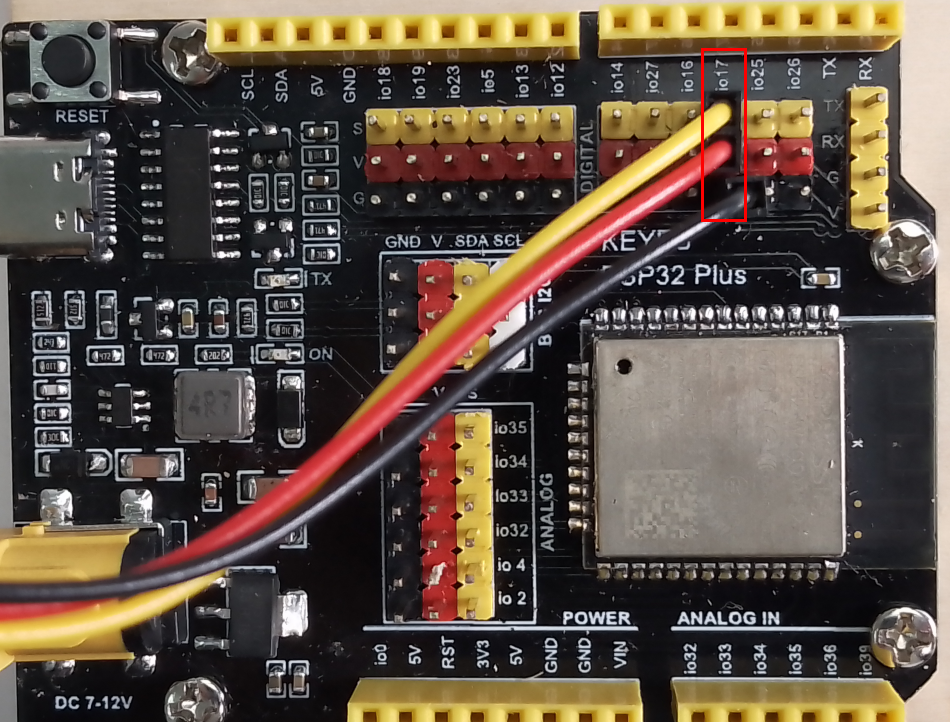
将温湿度模块接到io17接口
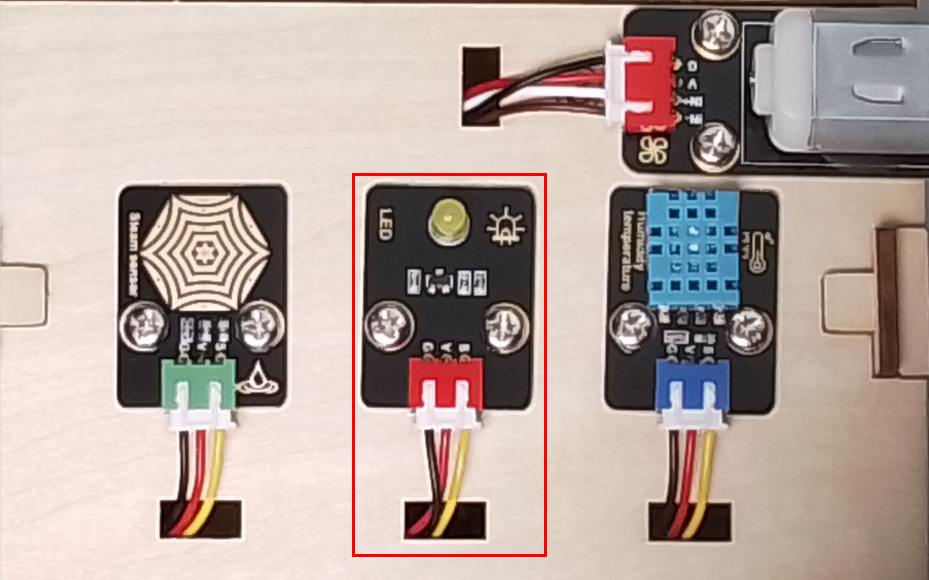
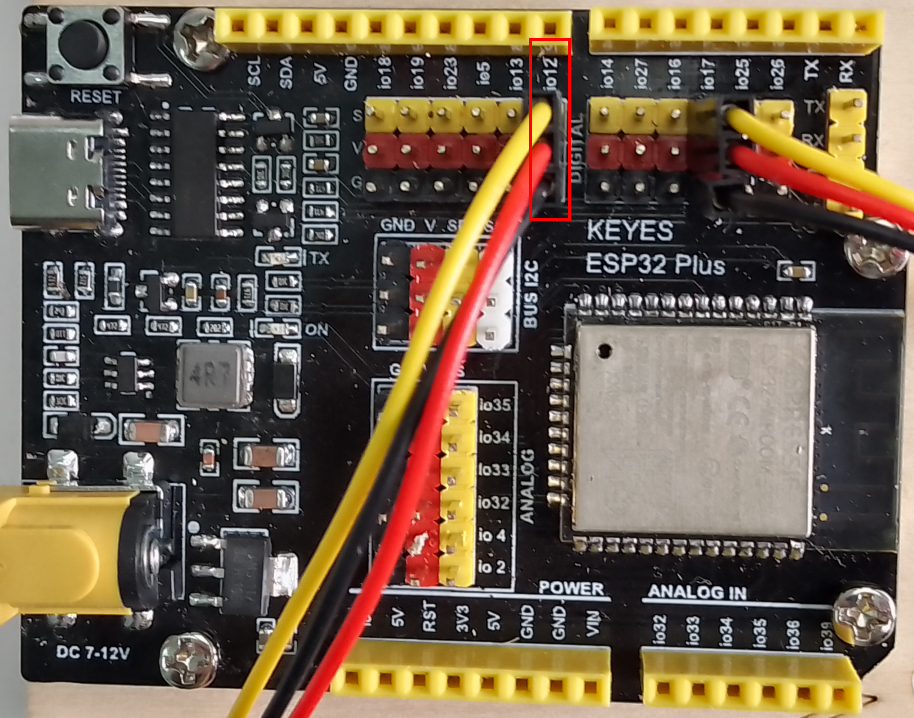
将黄色led模块接到io12接口
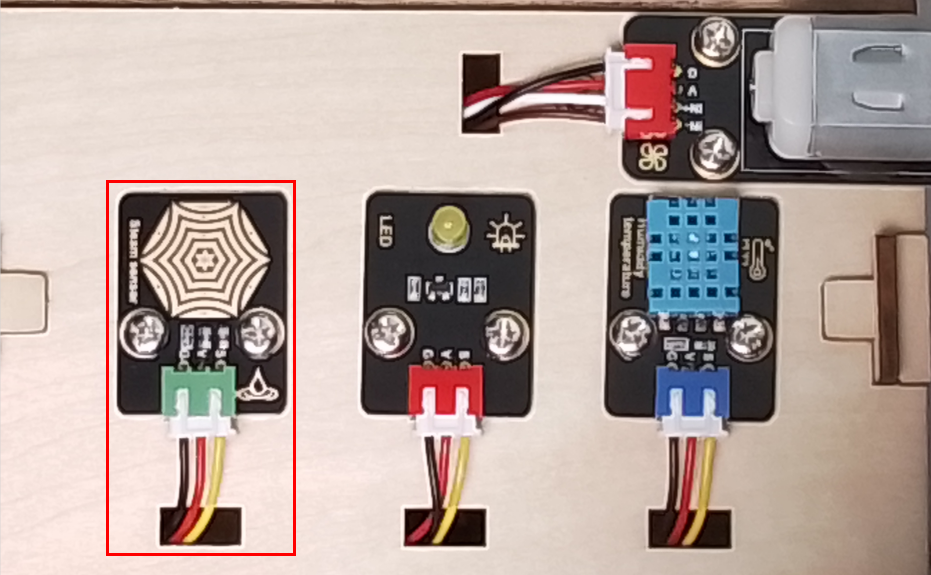
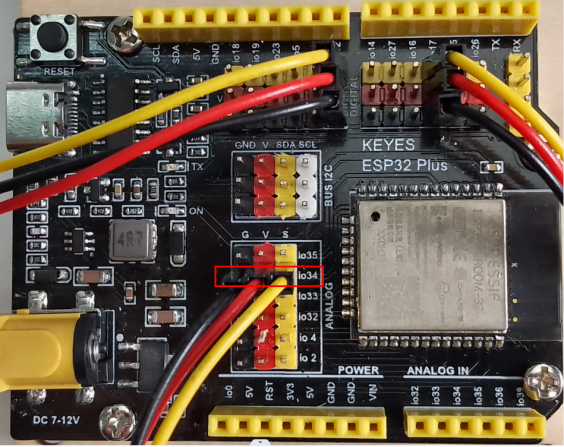
将水滴传感器接到io34接口
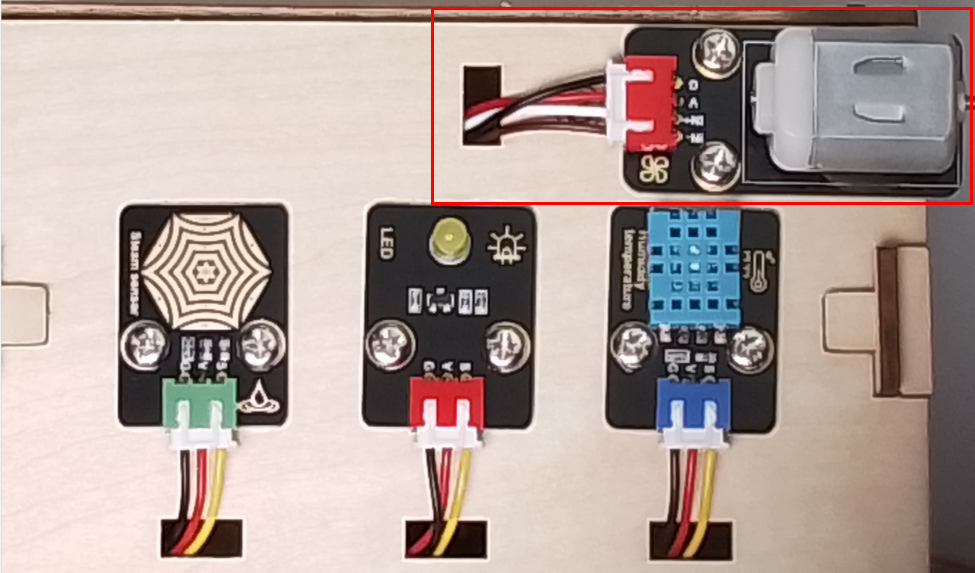
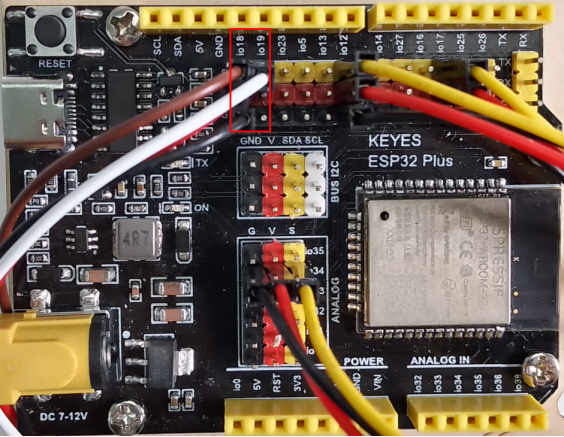
风扇模块接线(IN+对应io19,IN-对应io18)使用的杜邦线:4根散开的杜邦线
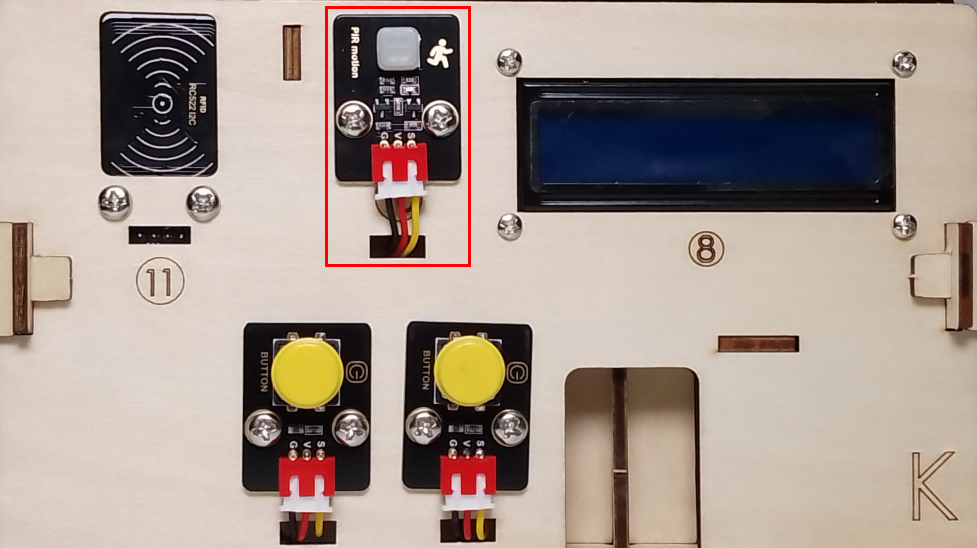
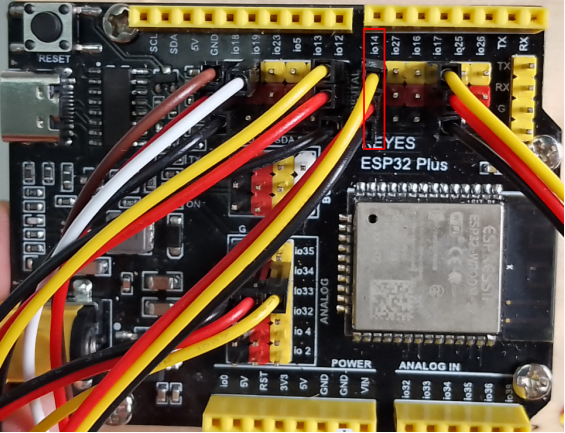
将人体红外传感器接到io14接口
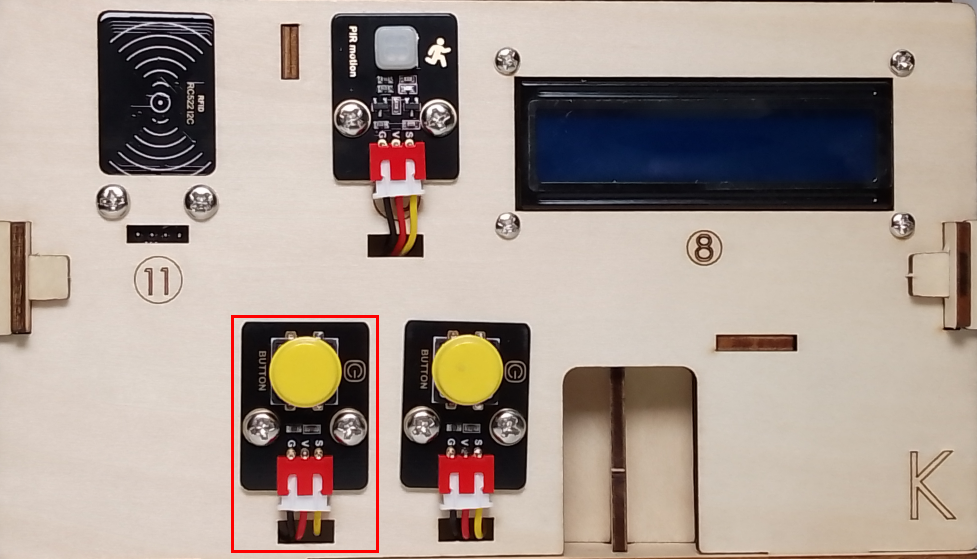
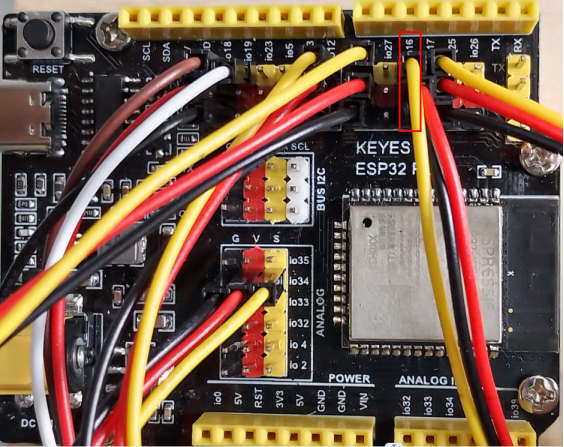
将左边按键模块接到io16接口
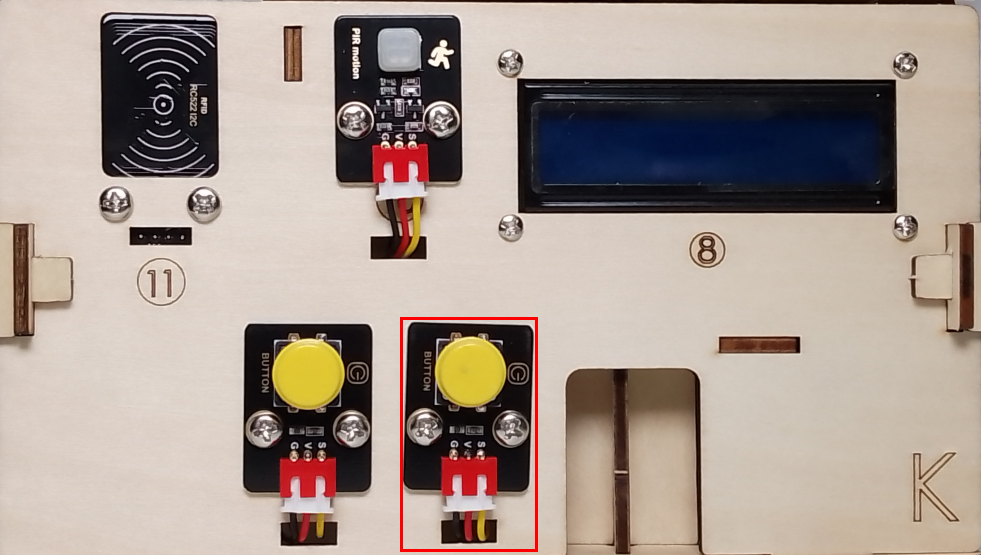
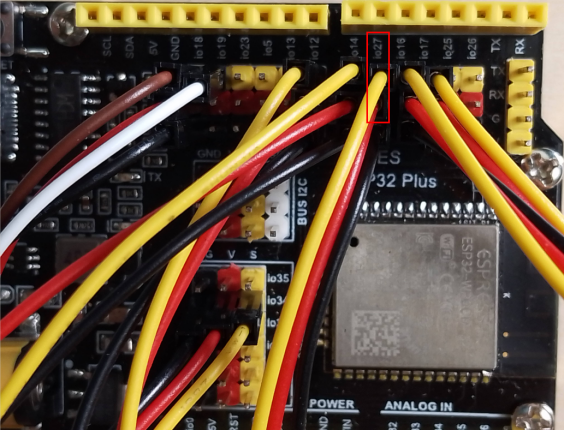
将右边按键模块接到io27接口
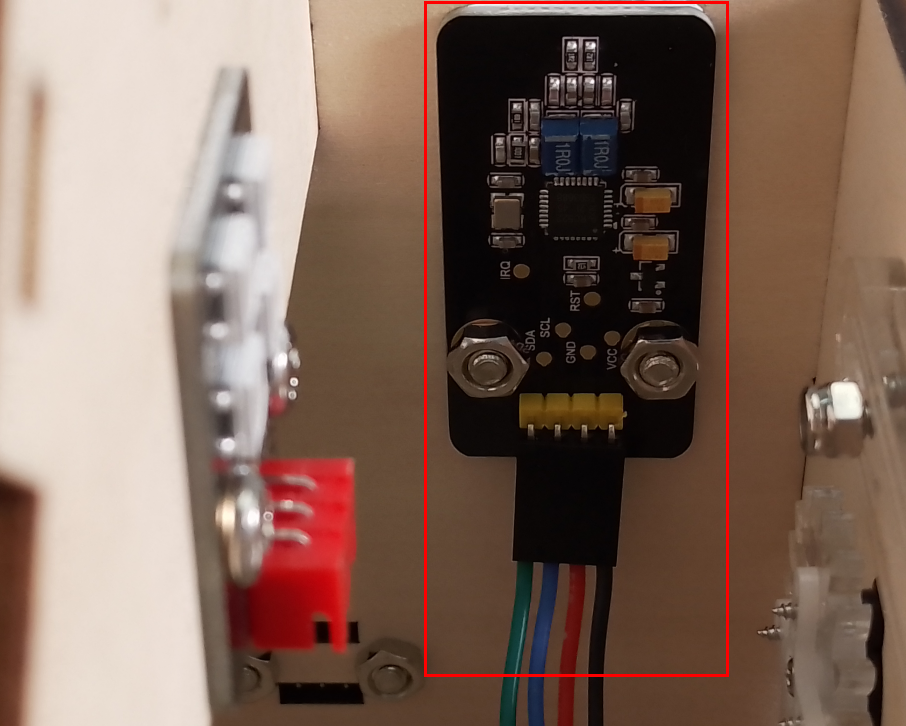
将RFID模块接到IIC接口
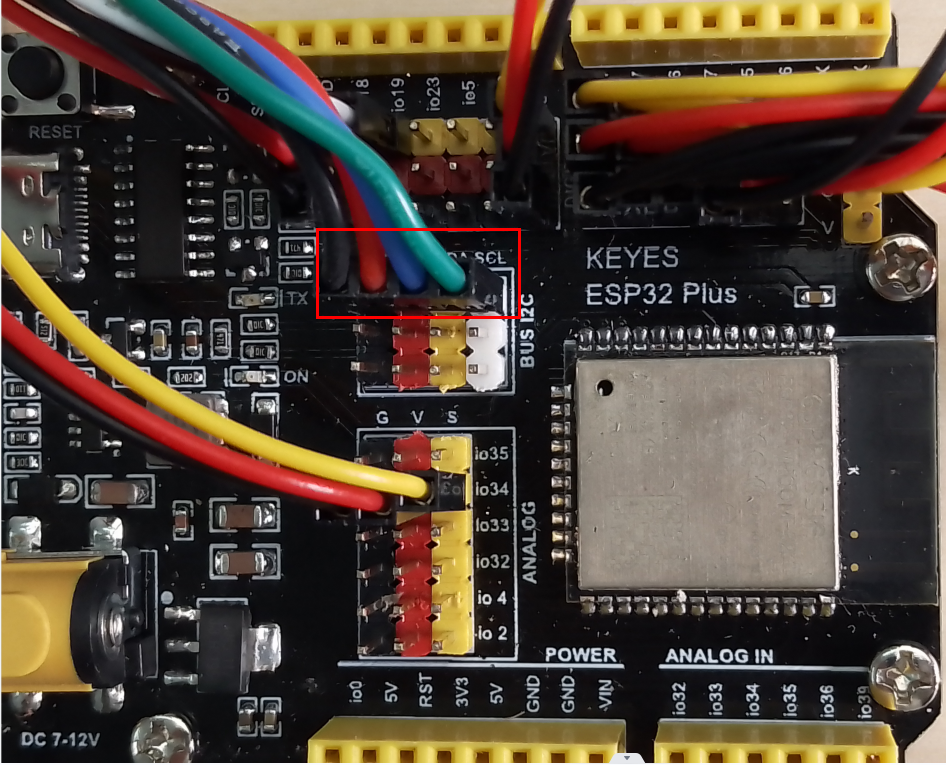
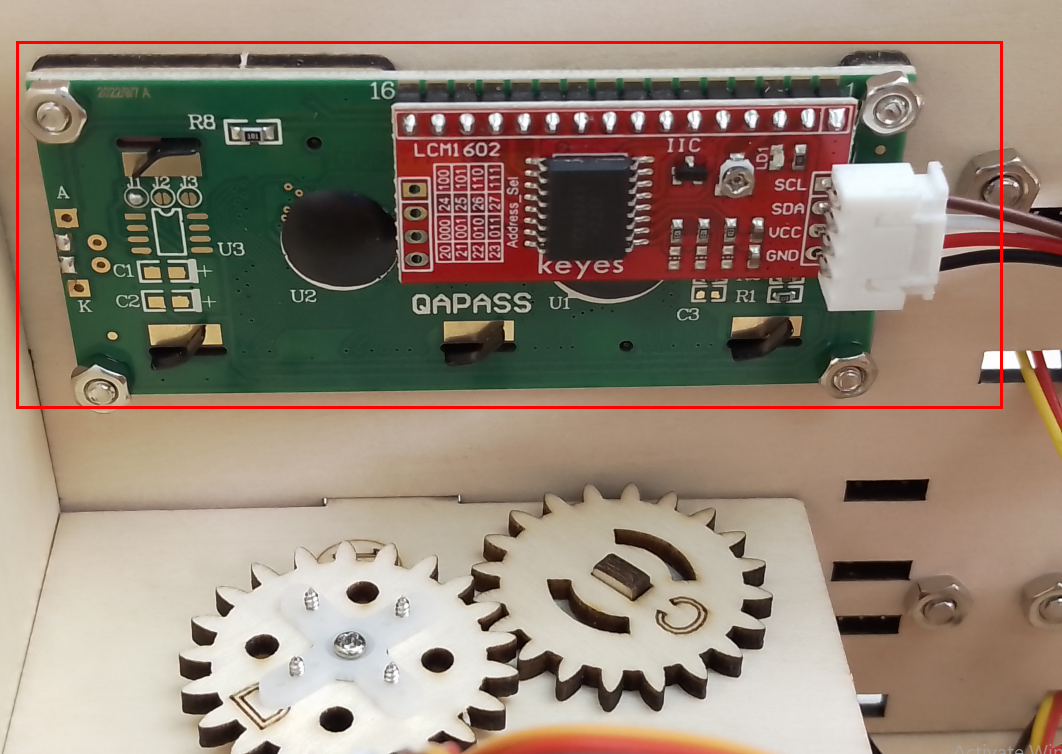
将LCD1602显示屏接到IIC接口
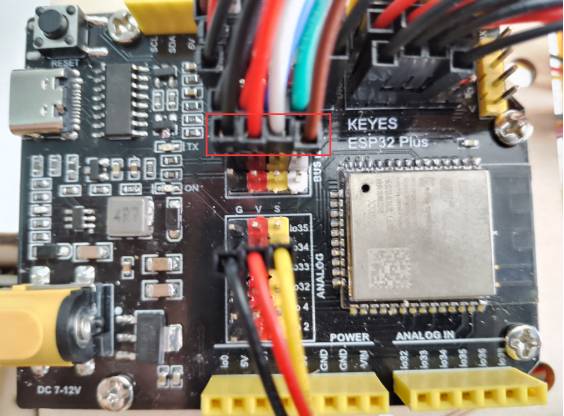
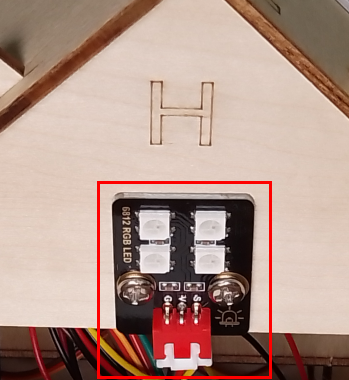
将6812RGB灯接到io26接口
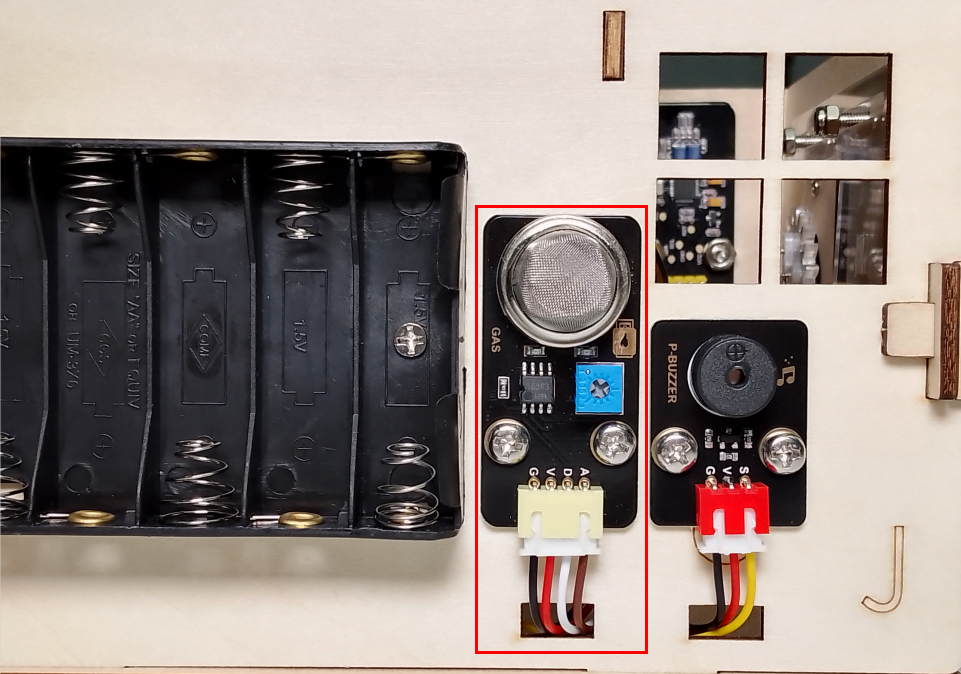
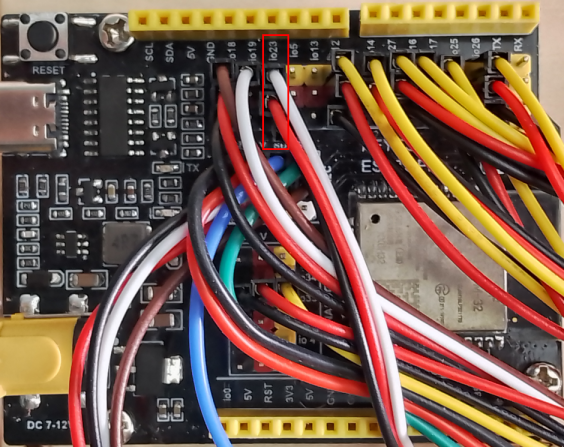
将气体传感器的白线接到io23接口,棕线不用接。
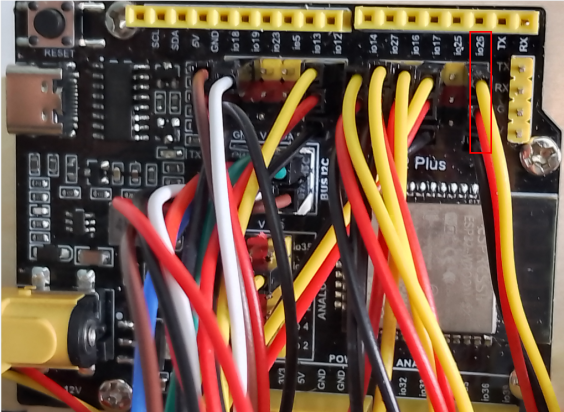
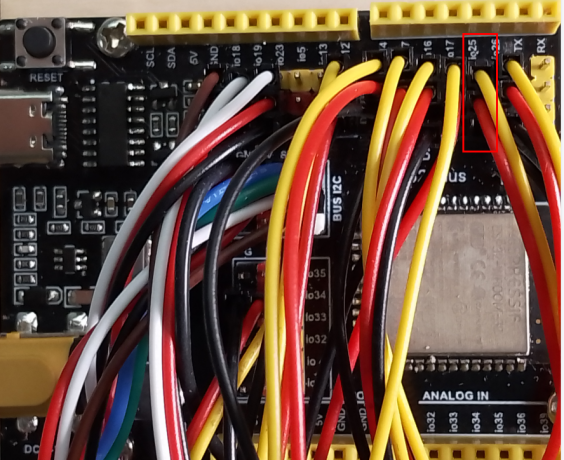
将蜂鸣器接到io25接口

将控制窗户的舵机接到io5接口

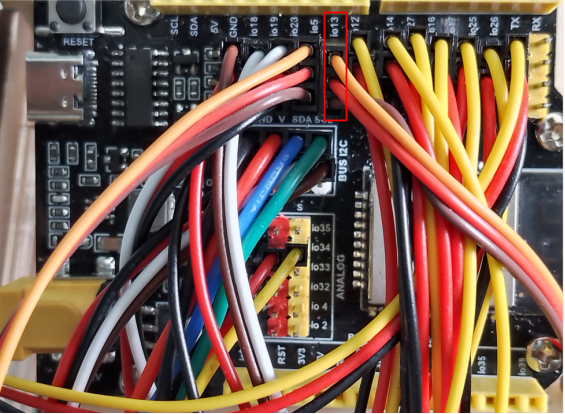
将控制门的舵机接到io13接口
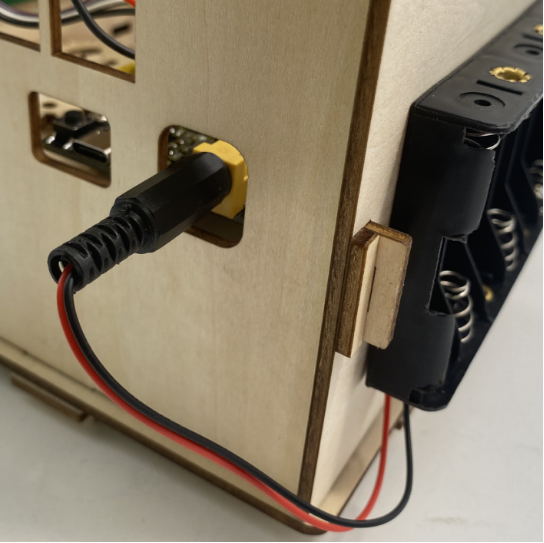
电源接线
安装20
安装所需零件

安装
完成
安装所需零件
安装
完成