Keyes平衡车介绍#
产品介绍#
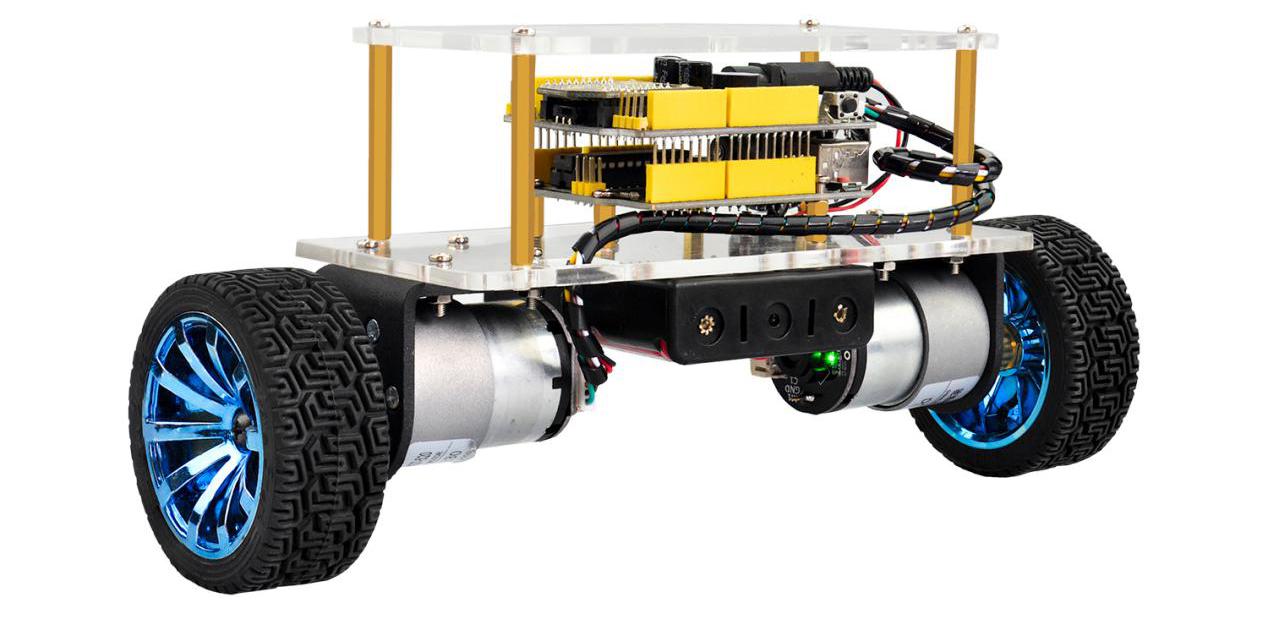
这是一款基于arduino平台搭建的两轮平衡车,平衡车采用陀螺仪MPU6050实时检测小车的运动姿态,核心控制板使用的是兼容arduino的Keyesb PLUS开发板。根据从传感器中获得的数据,经过PID算法处理之后,输出相应的控制信号到电机驱动电路,实现对小车电机的平衡控制.
平衡小车添加了蓝牙模块,可以进行无线控制;还添加了超声波模块来实现避障控制。它在一定的活动空间内,能够进行灵活的转向和前进,以及避障、跟随动作。并能在快速运动中实现自主平衡,在外界有适度干扰的情况下还能够自行调整并迅速恢复平衡状态。
以平衡小车为研究基础,后续可以搭载各种类型的传感器,能应用于复杂环境的勘探场合。
产品特点#
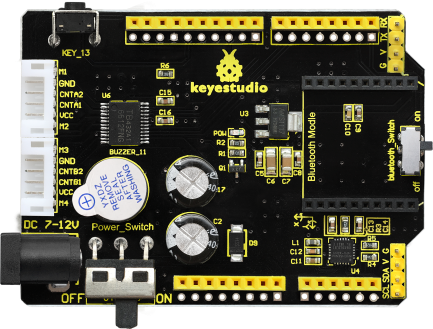
本产品集成了超声波功能、蓝牙控制功能。Keyes Balance Car Shield V3平衡车扩展板自带1个6612FNG芯片,用于驱动两个直流电机;2个白色接口,用于连接直流电机;1个DC头可以同时给扩展板和REV4供电;1个大拨码开关用于控制电源开关;1个MPU-6050用于检测小车姿势;1个XBEE 蓝牙模块接口,可连接蓝牙模块,方便与安卓手机通讯;一个小拨码开关,用于控制蓝牙模块通信;自带一个按键控制和有源蜂鸣器;将Plus板的控制端口用排排母,将串口通信和I2C通信接口用排针引出。
产品参数#
1.电机参数:
使用电压:DC12V
减速比: 1:30
空载电流:≤100mA
空载转速:247rpm
额定转矩:1.4 Kg.cm
额定转矩:137.3mN.m
额定转速:160rpm
额定电流:≤0.45A
堵转转矩:5.5 Kg.cm
停转电流:2.4A
减速器长度:22mm
2.工作电压:DC 9-12V
3.电机驱动芯片:TB6612FNG
4.车体姿态检测:MPU-6050
5.自带电源控制开关
6.自带蓝牙控制开关,控制串口通信
产品清单#
序号 |
图片 |
规格 |
倍用量 |
|---|---|---|---|
1 |
|
双通M3*45MM |
4 |
2 |
|
双通M3*10MM |
4 |
3 |
|
黑色蘑菇头 M4*6 十字 |
2 |
4 |
|
M3*6MM 圆头 |
6 |
5 |
|
M3*8MM 圆头 |
10 |
6 |
|
M3*8MM 平头 十字 |
16 |
7 |
|
M3*12MM 平头 十字 |
2 |
8 |
|
M3*12MM 圆头 |
10 |
9 |
|
M1.4*8MM 圆头 十字 304不锈钢 |
4 |
10 |
|
M1.4 镀镍 |
4 |
11 |
|
M3 镀镍 |
12 |
12 |
|
带超声波平衡车亚克力板三块 |
1 |
13 |
|
黑蓝 外径68mm 厚26mm 六角边套边到边12MM |
2 |
14 |
|
GM37-520直流减速,带霍尔编码器,12V,1:30,配L型标准支架 |
2 |
15 |
|
6MM孔*18MM长 铜 |
2 |
16 |
|
双头6芯 PH2.0绿棕黄白红黑 30CM 正向 |
2 |
17 |
|
公对母10CM/40P/2.54/10股铜包铝 24号线BL |
0.1 |
18 |
|
手柄颜色黄黑3*40MM十字螺丝刀 |
1 |
19 |
|
L型 M2 镀镍 |
1 |
20 |
|
18650三节15CM露线适用于平衡车+插杆 |
1 |
21 |
|
MPU-6050 Balance Car Shield V3平衡车扩展板 黑色环保 |
1 |
22 |
|
Keyes Uno Plus 开发板 红色环保 |
1 |
23 |
|
HC-SR04超声波传感器 |
1 |
24 |
|
Keyes Bluetooh XBee蓝牙无线HC-06 |
1 |
25 |
|
直径4MM 黑色(需要30CM 对半剪开成 2pcs 15cm的) |
0.15 |
26 |
|
USB2.0对TYPE C 白色 L:1M OD:4.0MM |
1 |




















获取资料和售后服务#
1.平衡车资料下载地址:https://pan.baidu.com/s/1Wu6cL3B8JNyqYA112h-lJg 提取码:iao4
2.如果发现某些东西丢失或损坏,或者学习套件时遇到一些困难。keyes会提供免费和快速的支持,如果您有任何疑问,请联系我们专业的销售人员。
3.欢迎提出建议和反馈,我们会根据您的反馈不断更新套件和教程,以使其更好。谢谢!