第16课 语音控制门窗系统#
16.1 项目介绍#
语音控制门窗是一种基于智能语音识别技术的现代化家居控制系统,通过语音指令实现对门窗的开启、关闭等操作,为用户提供更便捷、智能的生活体验。
语音控制门窗系统代表了智能家居发展的重要方向,通过将传统的门窗控制与先进的语音识别技术相结合,不仅提升了用户的生活便利性,还为实现真正的智能家居生态奠定了基础。随着人工智能技术的不断进步,语音控制门窗将在安全性、智能化程度和用户体验方面持续优化,成为未来智能建筑的标准配置。
16.2 实验组件#
|
|
|
|---|---|---|
ESP32 Plus主板 *1 |
180度舵机 *2 |
智能语音模块 *1 |
|
|
|
4P线 *1 |
USB线 *1 |



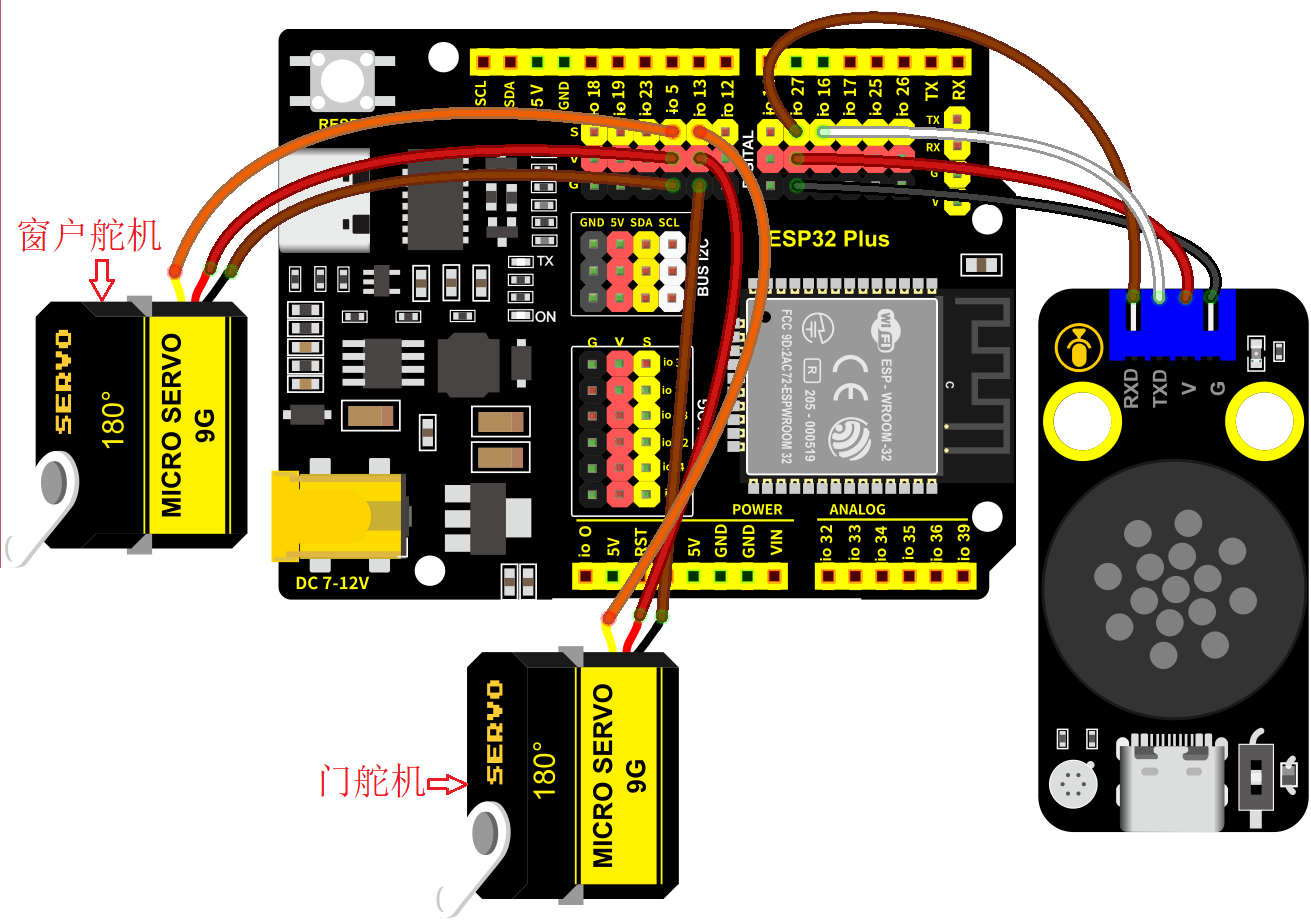
16.3 模块接线图#
智能语音模块,窗户舵机和门舵机的控制引脚:
窗户舵机(橙黄色线引脚) |
io5 |
|---|---|
门舵机(橙黄色线引脚) |
io13 |
智能语音模块(TXD引脚) |
io16 |
智能语音模块(RXD引脚) |
io27 |
⚠️ 特别注意:智能家居已经组装好了,这里不需要把智能语音模块和舵机拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
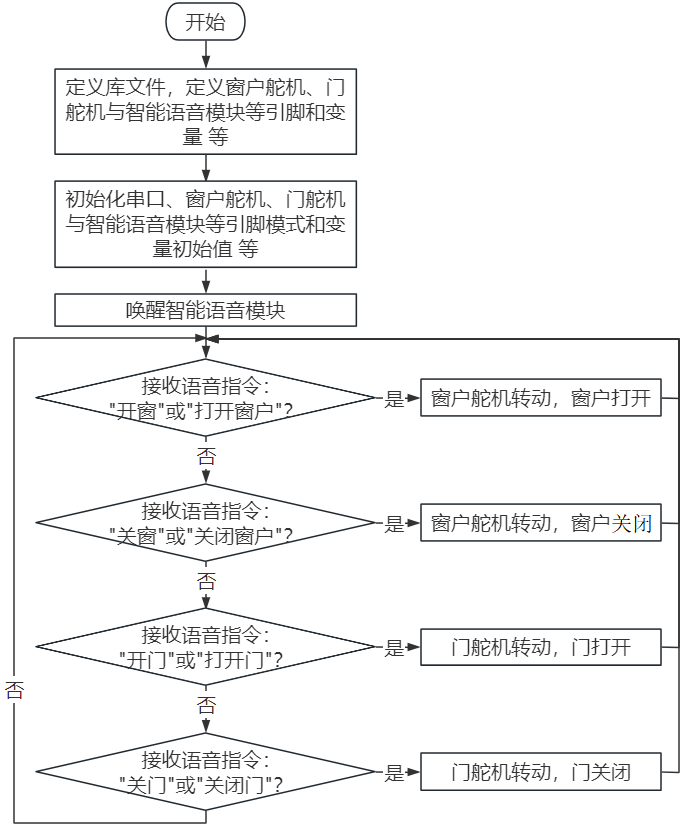
16.4 代码流程图#
16.5 实验代码#
使用智能语音模块控制智能家居的门、窗开与关。
打开“Thonny”软件,点击“此电脑” → “D:” → “MicroPython资料” → “MicroPython_代码”。并鼠标左键双击“Project_16_voice_control_door_window.py”。
from machine import Pin, PWM, UART
import time
# 引脚定义
RX_PIN = 27 # 语音模块RX引脚GPIO27
TX_PIN = 16 # 语音模块TX引脚GPIO16
SERVO_PIN_WINDOW = 5 # 窗户舵机引脚GPIO5
SERVO_PIN_DOOR = 13 # 门舵机引脚GPIO13
# 舵机角度参数(MicroPython中PWM占空比范围通常为0-1023)
WINDOW_OPEN_ANGLE = 80
WINDOW_CLOSE_ANGLE = 0
DOOR_OPEN_ANGLE = 175
DOOR_CLOSE_ANGLE = 0
# 语音指令定义
CMD_OPEN_WINDOW = 57
CMD_CLOSE_WINDOW = 58
CMD_OPEN_DOOR = 59
CMD_CLOSE_DOOR = 60
class ServoController:
def __init__(self, pin, min_duty=25, max_duty=128, min_angle=0, max_angle=180):
self.pwm = PWM(Pin(pin))
self.pwm.freq(50) # 舵机频率50Hz
self.min_duty = min_duty
self.max_duty = max_duty
self.min_angle = min_angle
self.max_angle = max_angle
self.current_angle = 0
def angle_to_duty(self, angle):
"""将角度转换为PWM占空比"""
angle = max(self.min_angle, min(self.max_angle, angle))
return int(self.min_duty + (angle - self.min_angle) *
(self.max_duty - self.min_duty) / (self.max_angle - self.min_angle))
def write(self, angle):
"""设置舵机角度"""
duty = self.angle_to_duty(angle)
self.pwm.duty(duty)
self.current_angle = angle
time.sleep_ms(1000) # 等待舵机移动
def detach(self):
"""断开舵机(停止供电)"""
self.pwm.deinit()
class VoiceControlSystem:
def __init__(self):
# 初始化串口(语音模块)
self.voice_uart = UART(2, baudrate=9600, rx=RX_PIN, tx=TX_PIN)
# 初始化舵机
self.window_servo = ServoController(SERVO_PIN_WINDOW)
self.door_servo = ServoController(SERVO_PIN_DOOR)
# 状态变量
self.window_state = False # False-关闭, True-打开
self.door_state = False # False-关闭, True-打开
# 初始化位置
self.initialize_positions()
def initialize_positions(self):
"""初始化到关闭位置"""
print("初始化系统位置...")
self.window_servo.write(WINDOW_CLOSE_ANGLE)
self.door_servo.write(DOOR_CLOSE_ANGLE)
time.sleep_ms(1000)
self.window_state = False
self.door_state = False
print("初始化完成")
def process_voice_command(self, command):
"""处理语音指令"""
print("收到语音指令:", command)
if command == CMD_OPEN_WINDOW:
self.control_window(True)
elif command == CMD_CLOSE_WINDOW:
self.control_window(False)
elif command == CMD_OPEN_DOOR:
self.control_door(True)
elif command == CMD_CLOSE_DOOR:
self.control_door(False)
else:
print("未知指令,请重试")
def control_window(self, open_cmd):
"""控制窗户"""
if open_cmd and not self.window_state:
self.window_servo.write(WINDOW_OPEN_ANGLE)
time.sleep_ms(1000)
self.window_state = True
print("窗户已打开")
elif not open_cmd and self.window_state:
self.window_servo.write(WINDOW_CLOSE_ANGLE)
time.sleep_ms(1000)
self.window_state = False
print("窗户已关闭")
else:
print("窗户已经是目标状态")
def control_door(self, open_cmd):
"""控制门"""
if open_cmd and not self.door_state:
self.door_servo.write(DOOR_OPEN_ANGLE)
time.sleep_ms(1000)
self.door_state = True
print("门已打开")
elif not open_cmd and self.door_state:
self.door_servo.write(DOOR_CLOSE_ANGLE)
time.sleep_ms(1000)
self.door_state = False
print("门已关闭")
else:
print("门已经是目标状态")
def get_system_status(self):
"""获取系统状态"""
return {
"window": "打开" if self.window_state else "关闭",
"door": "打开" if self.door_state else "关闭"
}
def emergency_stop(self):
"""紧急停止"""
self.window_servo.detach()
self.door_servo.detach()
print("紧急停止!所有舵机已断电")
def run(self):
"""主循环"""
print("智能语音门窗控制系统已启动")
print("等待语音指令...")
print("可用指令:57-开窗户, 58-关窗户, 59-开门, 60-关门")
while True:
# 检查语音模块数据
if self.voice_uart.any():
try:
command = self.voice_uart.read(1)
if command:
self.process_voice_command(command[0])
except Exception as e:
print("读取语音指令错误:", e)
time.sleep_ms(100)
# 扩展功能类
class EnhancedVoiceControlSystem(VoiceControlSystem):
def __init__(self):
super().__init__()
self.manual_control_enabled = True
def manual_control(self, device, action):
"""手动控制接口"""
if not self.manual_control_enabled:
print("手动控制已禁用")
return
if device == "window":
self.control_window(action == "open")
elif device == "door":
self.control_door(action == "open")
else:
print("未知设备")
def set_servo_calibration(self, device, min_duty=None, max_duty=None):
"""校准舵机参数"""
servo = self.window_servo if device == "window" else self.door_servo
if min_duty is not None:
servo.min_duty = min_duty
if max_duty is not None:
servo.max_duty = max_duty
print(f"{device}舵机校准完成: min_duty={servo.min_duty}, max_duty={servo.max_duty}")
# 创建并运行系统
if __name__ == "__main__":
try:
system = VoiceControlSystem()
system.run()
except KeyboardInterrupt:
print("系统已停止")
except Exception as e:
print("系统错误:", e)
16.6 实验结果#
按照接线图接好线,将 ESP32 主控板通过Micro USB数据线与计算机相连供电,外接电源供电,然后单击按钮 ,示例代码开始执行。
,示例代码开始执行。

示例代码执行之后,可以通过智能语音模块来控制门和窗。
对着智能语音模块上的麦克风,使用唤醒词 “你好,小智” 或 “小智小智” 来唤醒智能语音模块,同时喇叭播放回复语 “有什么可以帮到您”;接下来即可通过Shell打印窗口查看智能语音模块接收到语音命令词所对应的命令参数 等。
智能语音模块唤醒后,对着麦克风说:“开窗” 或 “打开窗户”等命令词时,Shell打印窗口打印命令参数 “57”,同时喇叭播放对应的回复语 “已为您打开窗户”;
对着麦克风说:“关窗” 或 “关闭窗户” 等命令词时,Shell打印窗口打印命令参数 “58”,同时喇叭播放对应的回复语 “已为您关闭窗户”;
对着麦克风说:“开门” 或 “打开门”等命令词时,Shell打印窗口打印命令参数 “59”,同时喇叭播放对应的回复语 “已为您打开门”;
对着麦克风说:“关门” 或 “关闭门” 等命令词时,Shell打印窗口打印命令参数 “60”,同时喇叭播放对应的回复语 “已为您关闭门”。
单击 “停止/启动后端进程”退出程序。
“停止/启动后端进程”退出程序。