第6课 自动门窗#
6.1 项目介绍#
当我们在制作智能家居时,经常会将舵机和门、窗等固定在一起。这样,我们就可以利用舵机转动,带动门、窗等开或关,从而起到家居生活的智能化功能。既然是自动门窗,那就需要动力装置,我们使用的是180度的舵机。再加上一些传感器,就会变得更加自动化,例如添加个雨滴传感器,就可以做下雨自动关窗;增加个RFID,就可以实现刷卡开门等。
6.2 舵机相关资料#
舵机: 舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
伺服电机有多种规格,但它们都有三根连接线,分别是棕色、红色、橙色(不同品牌可能有不同的颜色)。棕色为GND,红色为电源正极,橙色为信号线。
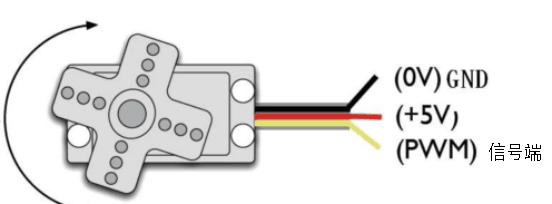
舵机的伺服系统由可变宽度的脉冲来进行控制,橙色的控制线是用来传送脉冲的。一般而言,PWM控制舵机的基准信号周期为20ms(50Hz),理论上脉宽应在1ms到2ms之间,对应控制舵机角度是0°~180°。但是,实际上更多控制舵机的脉宽范围是0.5ms到2.5ms,具体需要自己实际调试下。
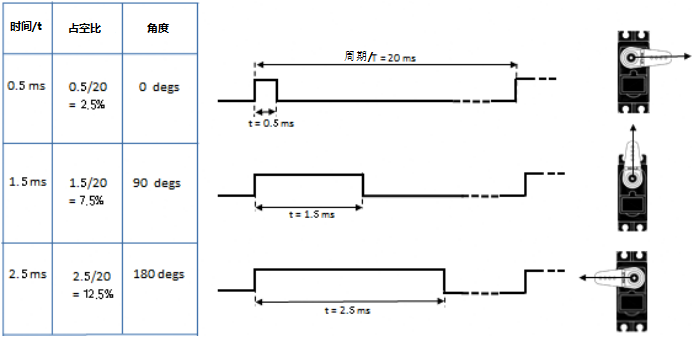
经过实测,舵机的脉冲范围为0.65ms~2.5ms。180度舵机,对应的控制关系是这样的:
高电平时间 |
舵机角度 |
基准信号周期时间(20ms) |
|---|---|---|
0.65ms |
0度 |
0.65ms高电平+19.35ms低电平 |
1.5ms |
90度 |
1.5ms高电平+18.5ms低电平 |
2.5ms |
180度 |
2.5ms高电平+17.5ms低电平 |
舵机的规格参数:
工作电压: |
DC 4.8V〜6V |
可操作角度范围: |
大约180°(在500→2500μsec) |
|---|---|---|---|
脉波宽度范围: |
500→2500 μsec |
外观尺寸: |
22.912.230mm |
空载转速: |
0.12±0.01 sec/60度(DC 4.8V) 0.1±0.01 sec/60度(DC 6V) |
|---|---|
空载电流: |
200±20mA(DC 4.8V) 220±20mA(DC 6V) |
停止扭力: |
1.3±0.01kg·cm(DC 4.8V) 1.5±0.1kg·cm(DC 6V) |
停止电流: |
≦850mA(DC 4.8V) ≦1000mA(DC 6V) |
待机电流: |
3±1mA(DC 4.8V) 4±1mA(DC 6V) |
重量: |
9±1g (without servo horn) |
使用温度: |
-30℃~60℃ |
6.3 实验组件#
|
|
|
|
|
|---|---|---|---|---|
ESP32 Plus主板 *1 |
水滴传感器模块 *1 |
180度舵机 *2 |
3P线 *1 |
USB线 *1 |



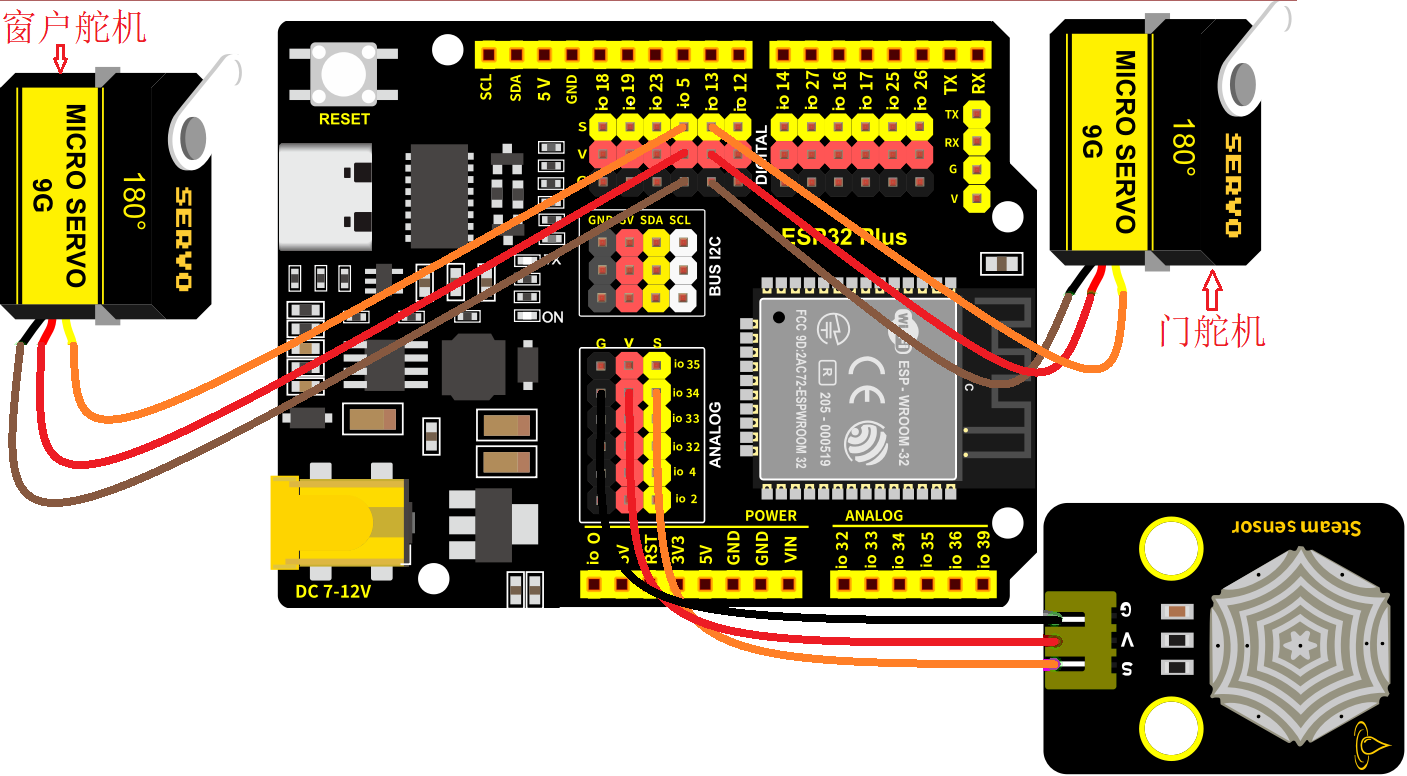
6.4 模块接线图#
水滴传感器,窗户舵机和门舵机的控制引脚:
窗户舵机(橙黄色线引脚) |
io5 |
|---|---|
门舵机(橙黄色线引脚) |
io13 |
水滴传感器(S引脚) |
io34 |
⚠️ 特别注意:智能家居已经组装好了,这里不需要把水滴传感器和舵机拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
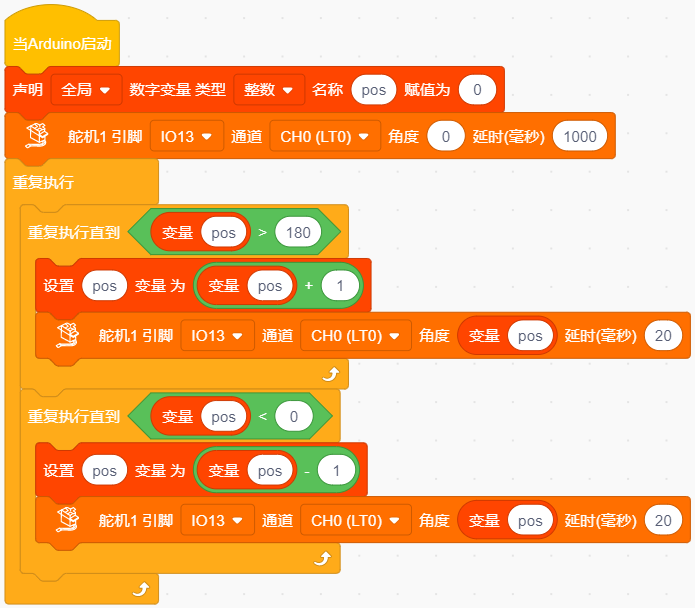
6.5 控制门来回转动的实验代码1#
6.6 实验结果1#
按照接线图接好线,外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮 上传示例代码至ESP32主控板。示例代码上传成功后,上电后,“智能家居的门”0~180度来回转动,并且每15ms转动一度。
上传示例代码至ESP32主控板。示例代码上传成功后,上电后,“智能家居的门”0~180度来回转动,并且每15ms转动一度。
6.7 代码流程图#
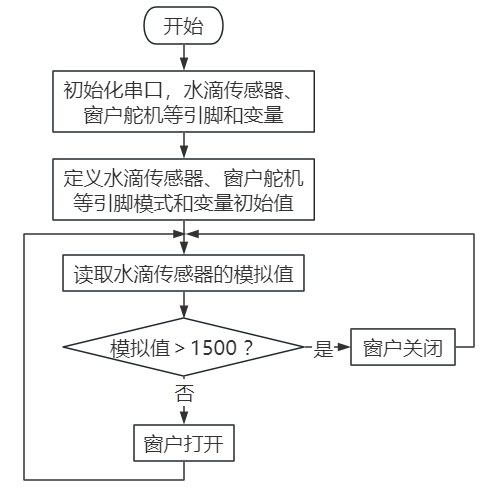
6.8 下雨自动关窗的实验代码2#
使用窗户舵机和雨滴传感器搭配做个下雨自动关窗装置。
雨滴传感器: 这是个模拟输入传感器,水分覆盖到检测面上的面积越大,返回的值越大(范围0~4096)

6.9 实验结果2#
按照接线图接好线,外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮上传示例代码至ESP32主控板。示例代码上传成功后,上电后,开始窗户自动打开,然后用湿润的手触碰一下雨滴传感器(模拟值>1500时),窗户就会关闭。