实验二十八 pico入侵检测报警器#

🌟 项目简介#
本实验将用 Raspberry Pi Pico 制作一个简易的「入侵检测报警器」:当有人经过人体红外热释传感器(PIR)前方时,系统会立刻触发警报——蜂鸣器“嘀嘀”鸣响,同时板载LED快速闪烁,发出明显警示!整个过程无需持续轮询,而是通过硬件中断高效响应,既省电又灵敏。
⚙️ 工作原理#
人体红外热释传感器(PIR):能感应人体散发的微弱红外热量变化。当有人进入其探测范围(约3–5米),模块输出引脚会由低电平(0V)跳变为高电平(3.3V),这个“从0到1”的跳变称为上升沿信号。
中断机制:我们让Pico在检测到这个上升沿时,立刻暂停主程序,执行专门的报警动作(叫蜂鸣器+闪LED),处理完再回到原来的任务——这样反应更快、更可靠!
有源蜂鸣器:通电就响(不需要自己生成频率),接高电平发声,接低电平静音。
板载LED:Pico 的 LED 在 GPIO25 上,亮/灭直接由
led.value(1)或led.value(0)控制。
🧰 所需材料#
|
|
|
|
|
|
|---|---|---|---|---|---|
Raspberry Pi Pico板 ×1 |
Raspberry Pi Pico扩展板 ×1 |
Keyes 人体红外热释传感器 ×1 |
Keyes 有源蜂鸣器模块 ×1 |
防反插3Pin杜邦线 ×2 |
MicroUSB数据线 ×1 |

✅ 小提示:所有模块都带防反插接口,插错方向无法插入,新手也能轻松上手!
🔌 接线图#
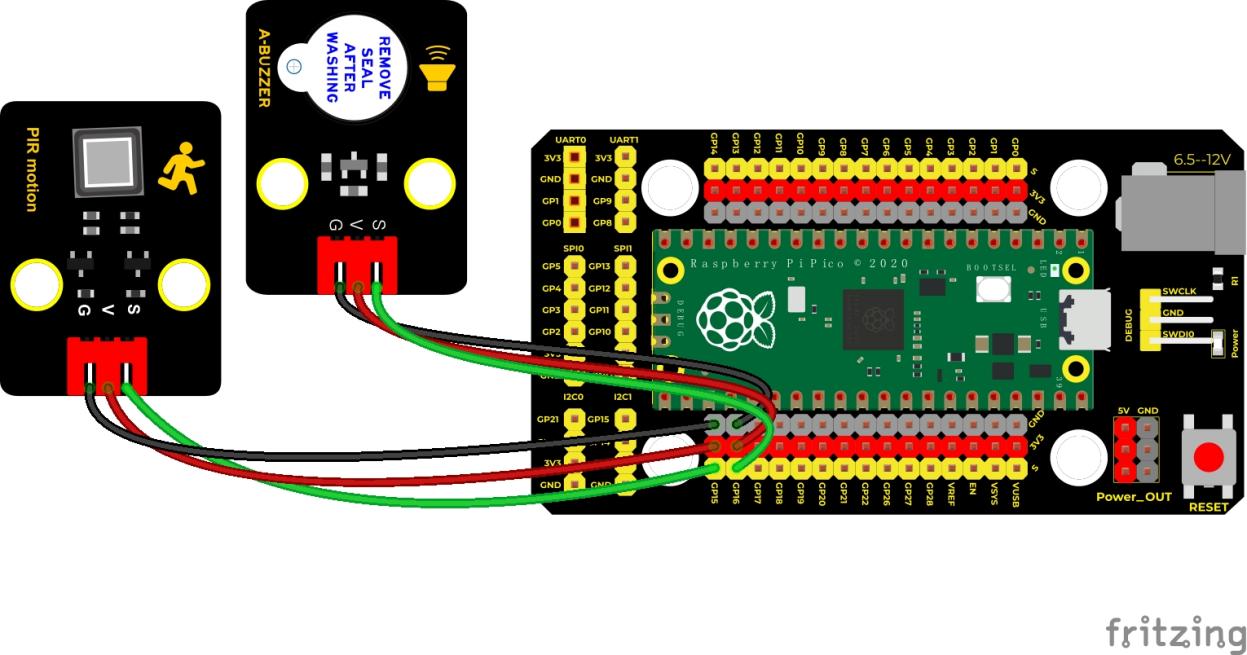
📌 接线说明(对照图连接,务必准确):
传感器/模块 |
连接到 Pico 引脚 |
说明 |
|---|---|---|
PIR传感器 VCC |
VSYS 或 3V3 |
供电(推荐用 VSYS,更稳定) |
PIR传感器 GND |
GND |
公共地 |
PIR传感器 OUT |
GP15 |
信号输入(触发中断) |
有源蜂鸣器 VCC |
GP16 |
控制端(高电平=响) |
有源蜂鸣器 GND |
GND |
公共地 |
(板载LED已内置,无需外接) |
— |
使用 GP25 |
⚠️ 注意:PIR传感器刚上电后需要约60秒“预热”,期间可能误触发,属正常现象,请耐心等待。
💻 示例代码(MicroPython)#
# Keyes Starter Kit for Raspberry Pi Pico
# 实验二十八:PIR入侵检测报警器
# 功能:有人靠近时,蜂鸣器鸣响 + 板载LED快速闪烁
import machine
import utime
# 定义引脚
sensor_pir = machine.Pin(15, machine.Pin.IN, machine.Pin.PULL_DOWN) # PIR信号接入GP15
led = machine.Pin(25, machine.Pin.OUT) # 板载LED(GP25)
buzzer = machine.Pin(16, machine.Pin.OUT) # 蜂鸣器控制引脚GP16
# 中断服务函数:当PIR检测到人时执行
def pir_handler(pin):
utime.sleep_ms(100) # 短暂延时,消除可能的信号抖动
if pin.value() == 1: # 确认是高电平(真正有人)
print("警告!检测到入侵!")
buzzer.value(1) # 蜂鸣器开启
# LED快速闪烁20次(每次亮/灭各100ms,共2秒)
for i in range(20):
led.toggle()
utime.sleep_ms(100)
# 设置GP15为上升沿中断(低→高时触发)
sensor_pir.irq(trigger=machine.Pin.IRQ_RISING, handler=pir_handler)
# 主循环:LED慢闪 + 蜂鸣器保持关闭
while True:
led.toggle() # 板载LED每2秒切换一次状态(慢闪,表示系统待机中)
buzzer.value(0) # 确保蜂鸣器默认静音
utime.sleep(2)
📖 代码解析#
代码片段 |
作用说明 |
|---|---|
|
将GP15设为输入模式,并启用内部下拉电阻——确保没信号时引脚稳定为低电平,避免误触发 |
|
开启硬件中断:只在GP15从“0”变成“1”时才调用 |
|
加100毫秒延时,过滤掉PIR模块通电或环境干扰引起的瞬间抖动,提高可靠性 |
|
让LED在“亮”和“灭”之间自动切换,比写 |
|
有源蜂鸣器:高电平响,低电平停;无需复杂频率控制 |
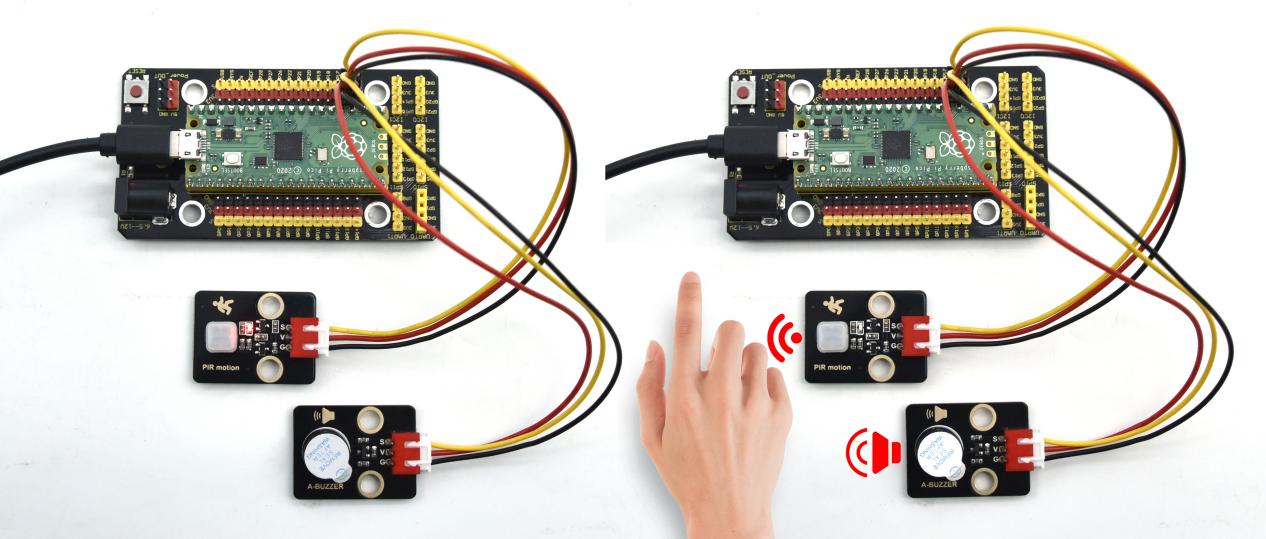
🎯 实验现象#
✅ 程序运行后:
板载LED以约2秒周期缓慢闪烁(一亮一灭),表示系统已启动、正在待机监听;
PIR传感器指示灯(如模块上有)可能常亮或微闪(不同型号略有差异),请勿遮挡;
当你缓慢走近传感器前方1–3米处(避开直射阳光/暖气片等热源),
→ 立刻听到“嘀——嘀——嘀——”连续短促蜂鸣声,
→ 同时LED进入快速闪烁模式(约10Hz)持续2秒,
→ 屏幕串口打印:⚠️ 警告!检测到入侵!报警结束后,LED自动恢复慢闪,等待下一次触发。
⚠️ 注意事项#
PIR需要“预热”:首次上电后,等待约60秒再测试,否则易受初始校准影响而误报;
避免干扰源:不要将PIR放在空调出风口、暖气旁、阳光直射窗边,这些会导致温度突变误触发;
检测角度:PIR通常呈扇形探测(约110°水平角),正对人行走方向效果最佳;
蜂鸣器类型确认:本实验使用的是有源蜂鸣器(通电即响),若误用无源蜂鸣器(需PWM驱动)则不会发声;
USB供电足够:Pico通过MicroUSB供电可稳定驱动PIR+蜂鸣器,无需额外电源;
中断去抖必要:代码中
sleep_ms(100)是关键,跳过PIR输出的初始不稳定脉冲,大幅提升稳定性。
🧠 扩展思维#
如果想让报警器在第一次检测到人后,持续报警10秒(而不是只响2秒),并在报警期间不再响应新的人体移动,该怎样修改代码?