实验二十七 障碍物报警实验#
🌟 项目简介#
本实验通过避障传感器实时检测前方是否有障碍物,一旦检测到,立即驱动有源蜂鸣器发出“嘀——”的报警声。这是一个典型的“感知→判断→响应”智能小系统,就像汽车倒车雷达、自动门感应器一样简单又实用!
⚙️ 工作原理#
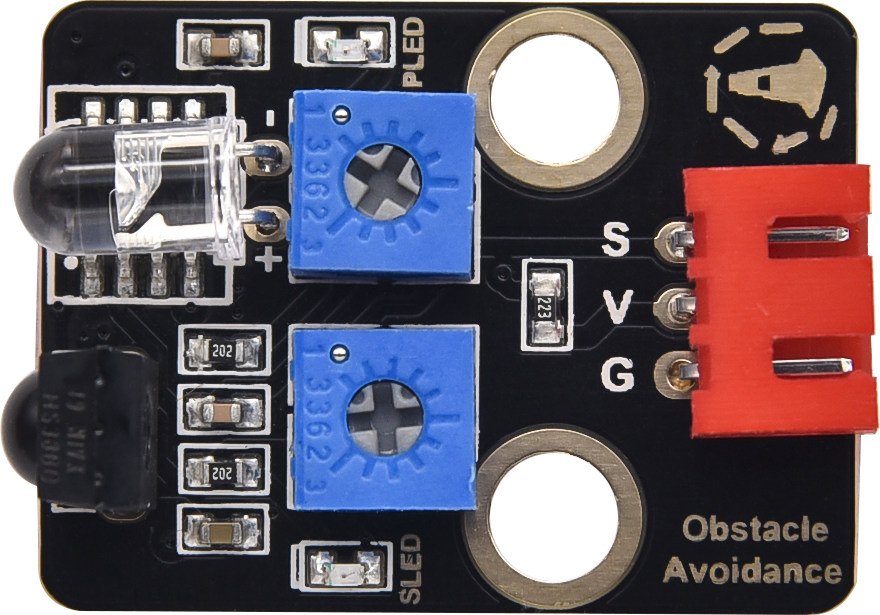
避障传感器(红外反射式):发射红外光,遇到障碍物会反射回来,内部电路判断后输出低电平(0)表示检测到障碍物,高电平(1)表示无障碍。
有源蜂鸣器:内部自带振荡电路,只需给它高电平(3.3V)就响,低电平(0V)就停。
所以我们把传感器的信号“取反”后直接送给蜂鸣器——
✅ 有障碍 → 传感器输出0→not(0)=1→ 蜂鸣器响
❌ 无障碍 → 传感器输出1→not(1)=0→ 蜂鸣器停
🧰 所需材料#
|
|
|
|
|
|
|---|---|---|---|---|---|
Raspberry Pi Pico板 ×1 |
Raspberry Pi Pico扩展板 ×1 |
Keyes 避障传感器模块 ×1 |
Keyes 有源蜂鸣器模块 ×1 |
防反插3Pin杜邦线 ×2 |
Micro USB数据线 ×1 |

💡 小贴士:所有模块都使用标准3Pin接口(VCC-GND-SIG),接线时注意“红(VCC)-黑(GND)-黄/白(SIG)”顺序,防反插设计让你不怕插错!
🔌 接线图#
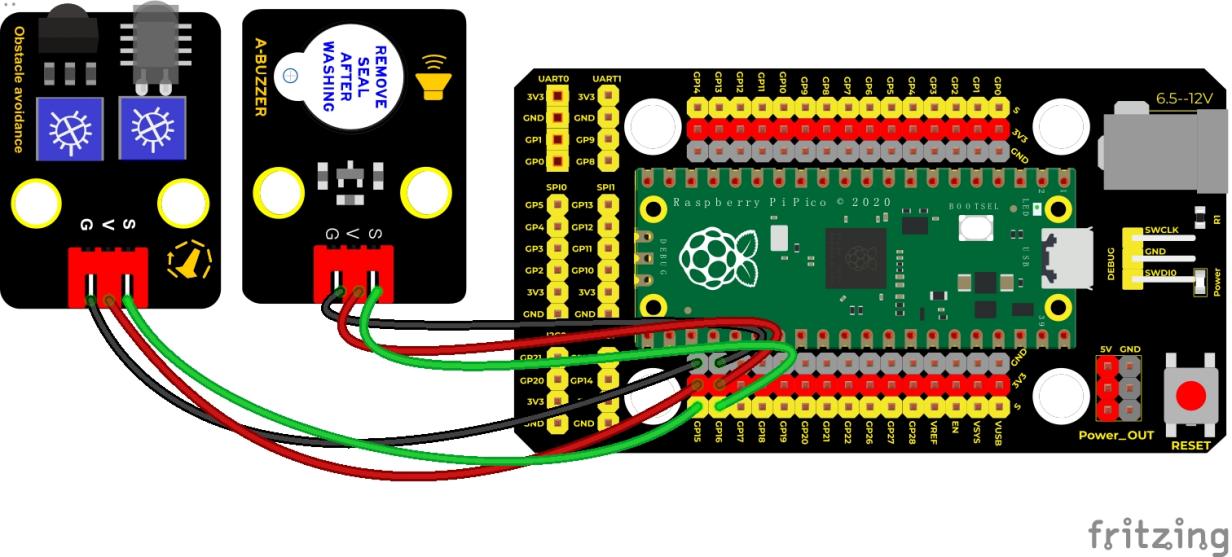
✅ 正确接法(务必对照图检查):
避障传感器 → Pico扩展板
VCC(红)→ 3.3V(或 VSYS,推荐3.3V更稳定)
GND(黑)→ GND
SIG(黄)→ GP15(即 Pin 15)
有源蜂鸣器 → Pico扩展板
VCC(红)→ 3.3V
GND(黑)→ GND
SIG(白)→ GP16(即 Pin 16)
⚠️ 注意:不要把蜂鸣器接到5V!Pico的IO口最大耐压为3.3V,接5V可能损坏引脚。
💻 示例代码(MicroPython)#
# Keyes Starter Kit for Raspberry Pi Pico
# 实验二十七:障碍物报警实验
# 功能:检测到障碍物时,蜂鸣器响起;移开后停止
from machine import Pin
import time
# 定义引脚
buzzer = Pin(16, Pin.OUT) # GP16 控制蜂鸣器(有源)
sensor = Pin(15, Pin.IN) # GP15 接收避障传感器信号
# 主循环:持续检测并响应
while True:
# 传感器检测到障碍物时输出低电平(0),取反后让蜂鸣器得高电平而发声
buzzer.value(not sensor.value())
time.sleep(0.01) # 每10毫秒检测一次,反应快又不占资源
📝 代码解析#
代码行 |
中文说明 |
|---|---|
|
把GP16设置为输出模式,用来控制蜂鸣器开关 |
|
把GP15设置为输入模式,用来读取避障传感器的状态 |
|
|
|
短暂等待10毫秒,既保证响应灵敏,又避免程序跑得太快占用全部CPU |
✅ 小实验:试着把
0.01改成0.5,你会发现蜂鸣器变成“嘀…嘀…嘀…”慢节奏报警声哦!
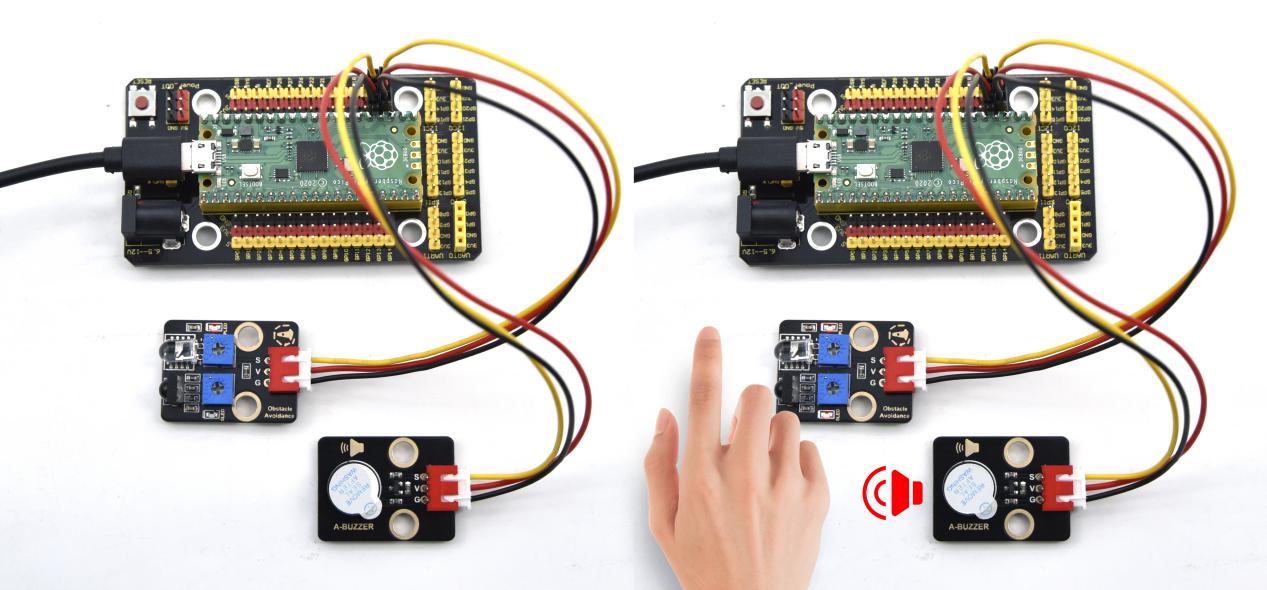
🎯 实验现象#
✅ 正确接线并运行代码后:
将手或书本靠近避障传感器前端(约2~5cm),蜂鸣器立即发出清晰响声;
移开障碍物,声音立刻停止;
反复靠近/移开,蜂鸣器同步响应,像一个聪明的小哨兵 👮♂️
⚠️ 注意事项#
电源安全第一:所有模块VCC请统一接Pico的3.3V引脚(不是VSYS或5V),避免烧坏Pico或模块;
传感器校准:避障传感器底部有个小电位器,顺时针旋转可增大检测距离,逆时针减小;初次使用建议调至中间位置;
接线再三确认:特别注意SIG线别和VCC/GND接反,否则传感器可能不工作或输出异常;
蜂鸣器类型确认:本实验必须使用有源蜂鸣器(Active Buzzer),不是无源蜂鸣器(Passive)——有源蜂鸣器背面通常标有“A”或“ACTIVE”,通电就响;无源的需要程序发不同频率方波才能响,本课不适用;
USB供电足够吗? 如果蜂鸣器声音微弱或时响时不响,可能是USB供电不足,请换用带电源适配器的USB充电头(≥500mA)供电。
🧠 扩展思维#
如果想让蜂鸣器在检测到障碍物时“嘀嘀嘀”快速连响3声,而不是一直长响,代码中该怎样修改?