实验二十 超声波传感器的原理#

你有没有观察过蝙蝠在黑夜中飞行?它们从不撞到树枝或墙壁,就像有“隐形眼睛”一样!其实,蝙蝠用的是超声波回声定位——它发出人耳听不见的高频声音(>20000 Hz),声音碰到物体后反弹回来,蝙蝠靠“听回声”的时间差,就能立刻判断出前方有什么、有多远、甚至是不是在动!
超声波就像看不见的“声音尺子”:方向准、穿透力强、能量集中,在医学(B超)、工业(清洗零件)、汽车(倒车雷达)中都大显身手。我们今天就用一块小小的HC-SR04模块,亲手造一把属于自己的“声音尺子”!
🔍 实验说明#
本实验使用Keyes HC-SR04超声波传感器,模拟蝙蝠的本领:
✅ 自动发射40 kHz超声波(人耳完全听不到)
✅ 检测前方是否有障碍物
✅ 精确测量距离(2 cm ~ 400 cm,误差仅约3 mm)
✅ 将结果实时显示在电脑屏幕上(单位:厘米)
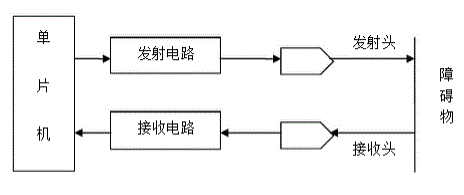
⚙️ 实验原理:回声测距法#
就像对着山谷大喊一声、听回声算距离一样,HC-SR04也用“发射→等待→接收→计时”的方式工作:
触发(TRIG引脚):给它一个“开始测距”的信号——持续至少10微秒的高电平;
自动发射:模块立刻发出8个40 kHz超声波脉冲;
等待回声:如果前方有障碍物,声波会反弹回来;
接收(ECHO引脚):模块收到回声后,ECHO引脚会输出一个高电平脉冲,这个高电平持续的时间 = 声波来回一趟所用的时间;
计算距离:
声速 ≈ 343.2 m/s(20℃室温)→ 即 0.0343 厘米/微秒
单程距离 = (来回时间 × 声速)÷ 2
所以:距离(cm)= (ECHO高电平时间 us)× 0.0343 ÷ 2
💡 小提示:公式里的
0.0343是把343.2 m/s换算成“厘米/微秒”得到的(343.2 × 100 ÷ 1,000,000 = 0.03432),更精确哦!
🧰 实验器材#
|
|
|
|
|
|---|---|---|---|---|
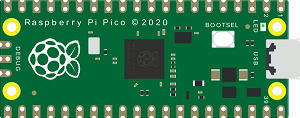
Raspberry Pi Pico板 ×1 |
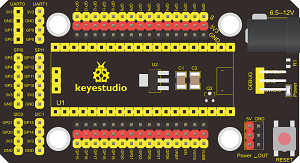
Raspberry Pi Pico扩展板 ×1 |
Keyes HC-SR04超声波模块 ×1 |
杜邦线(4Pin,含公对母/母对母)×1 |
Micro USB数据线 ×1 |


⚠️ 注意:套件中标注为“SR01”的模块实为常见型号 HC-SR04(功能与接线完全一致),请放心使用。
🔌 接线图#
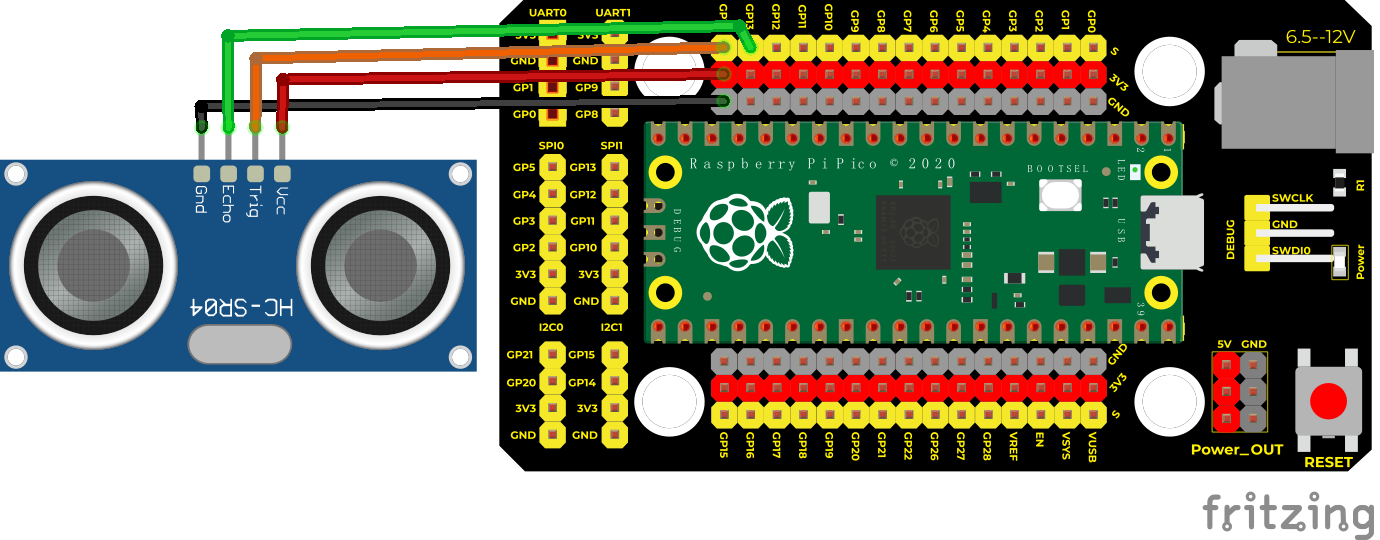
✅ 正确接线方式(Pico引脚编号以物理引脚为准):
HC-SR04 引脚 |
连接到 Pico 引脚 |
作用 |
|---|---|---|
VCC |
VSYS 或 5V(扩展板标“5V”) |
供电(5V) |
GND |
GND |
接地 |
TRIG |
GP14(物理引脚19) |
发送触发信号 |
ECHO |
GP13(物理引脚17) |
接收回声信号 |
✅ 小贴士:ECHO引脚输出的是3.3V逻辑电平,Pico可直接识别,无需电平转换!
💻 测试代码(MicroPython)#
# Keyes Starter Kit for Raspberry Pi Pico
# 课程 20: Ultrasonic Distance Sensor
from machine import Pin
import utime
# 定义超声波测距函数(返回单位:厘米)
def getDistance(trigger, echo):
# 步骤1:发送10微秒高电平触发信号
trigger.low() # 先拉低,确保信号干净
utime.sleep_us(2)
trigger.high() # 拉高
utime.sleep_us(10) # 保持10微秒
trigger.low() # 再拉低,完成触发
# 步骤2:等待ECHO引脚变为高电平(表示开始接收回声)
while echo.value() == 0:
start = utime.ticks_us() # 记录回声到达时刻(起始时间)
# 步骤3:等待ECHO变回低电平(表示回声结束)
while echo.value() == 1:
end = utime.ticks_us() # 记录回声结束时刻
# 步骤4:计算时间差,换算为距离(cm)
# 声速 = 343.2 m/s = 0.03432 cm/us,来回距离需除以2
duration = end - start
distance = duration * 0.0343 / 2
return distance
# 初始化引脚
trigger = Pin(14, Pin.OUT) # GP14 → TRIG
echo = Pin(13, Pin.IN) # GP13 → ECHO
# 主循环:每0.1秒测一次距离,并打印
while True:
distance = getDistance(trigger, echo)
print("The distance is :{:.2f} cm".format(distance))
utime.sleep(0.1)
📝 代码解析#
代码片段 |
说明 |
|---|---|
|
发出标准10μs高电平触发脉冲,是HC-SR04启动测距的“口令” |
|
利用Pico的 |
|
把微秒级时间换算成厘米距离,数值经过校准,实测更稳定 |
|
|
✅ 运行前请确认:
Pico已通过USB线连接电脑并成功识别为串口设备
已使用Thonny或Mu等工具将代码上传并运行
打开下方Shell窗口,即可看到实时刷新的距离数值!
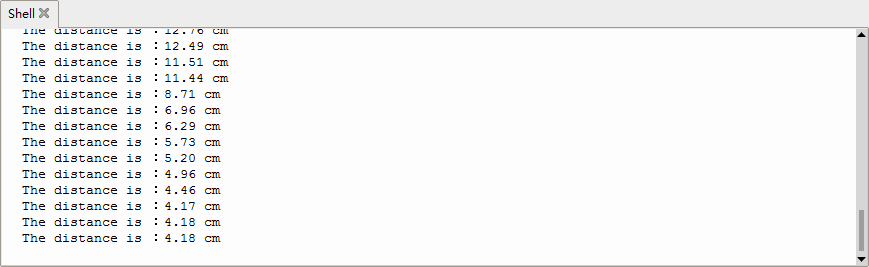
📊 测试结果#
运行程序后,Shell窗口将不断刷新显示当前距离,例如:
The distance is :15.32 cm
The distance is :14.87 cm
The distance is :12.05 cm
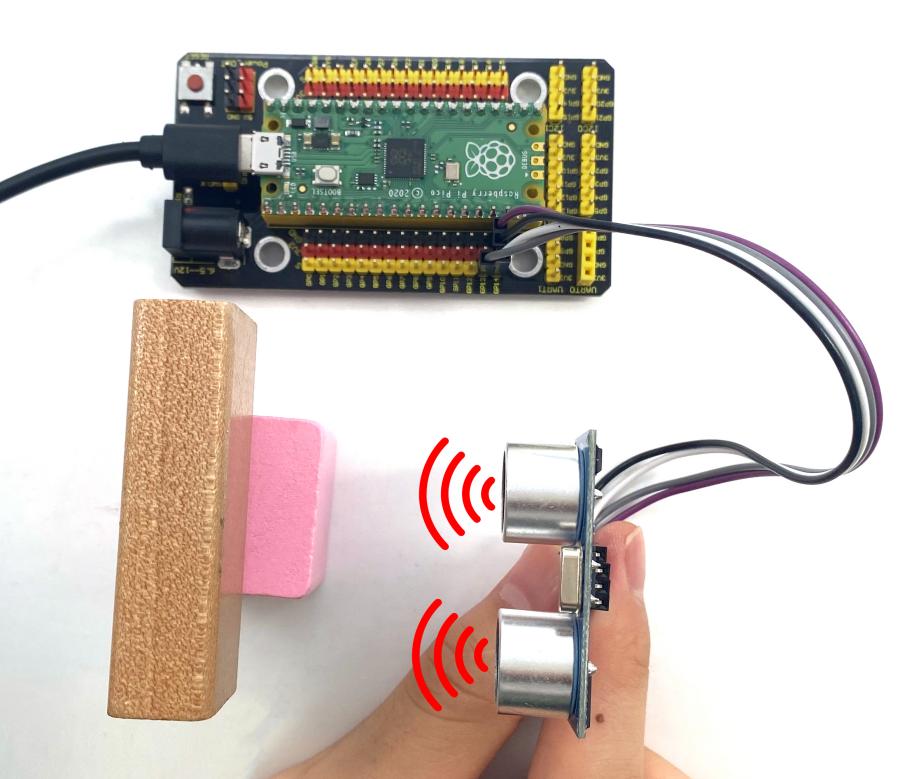
当你用手靠近或远离传感器时,数值会灵敏变化!
如下图所示:
⚠️ 注意事项#
✅ 供电稳定最重要:HC-SR04必须接5V电源(可用扩展板“5V”接口),不可接3.3V,否则可能无法正常发射超声波;
✅ 避免金属/吸音表面干扰:对着厚窗帘、毛绒玩具、软墙测量时,可能因回声太弱而读数不准或显示0;建议先用书本、手掌、桌面测试;
✅ 最小有效距离为2 cm:太近时发射波与反射波重叠,模块无法分辨,此时可能返回0或异常值;
❌ 勿遮挡传感器正面两个圆形探头(左边是发射器,右边是接收器),灰尘或胶带覆盖会影响性能;
🔁 若数值频繁跳变或显示负数/极大值(如9999),请检查:
▸ 接线是否松动(特别是ECHO是否接错引脚)
▸ TRIG/ECHO是否接反(TRIG必须接输出引脚,ECHO必须接输入引脚)
▸ 是否在强风、高温或高湿环境中测试(影响声速)
🧠 扩展思维#
在本课超声波测距的基础上,如果想让Pico根据距离远近控制LED亮度(比如:越近灯越亮),该怎样修改代码?